
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор исследований и разработок
- 3.1. Виды неисправностей и общий вид системы их диагностики
- 3.2. Методы диагностики асинхронного двигателя
- 4. Технические требования к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя
- Выводы
- Список источников
Введение
Асинхронные двигатели (АД) широко используется в производстве, транспортировке, нефтехимической, горнодобывающей, энергетической системах и т. д. Это обусловлено их высокой надежностью, простотой конструкции, высокой перегрузочной способностью и высокой эффективностью. По сравнению с двигателями постоянного тока, асинхронные двигатели являются более прочными, менее дорогими и требуют меньших затрат на обслуживание. Поэтому они являются предпочтительными при выборе промышленных двигателей [1].
Порой, как и любая другая машина такой двигатель может выйти из строя из-за тяжелых рабочих условий, агрессивной рабочей среды, не правильной установки и сборки и т.д.
Отечественный и зарубежный опыт показывает, что внедрение средств диагностирования является одним из важнейших факторов повышения экономической эффективности использования оборудования в промышленности. Назначение диагностики – выявление и предупреждение отказов и неисправностей, поддержание эксплуатационных показателей в установленных пределах, прогнозирование состояния в целях полного использования ресурса [2].
1. Актуальность темы
У электродвигателей после ремонта с разборкой и заменой деталей надежность работы часто снижается. Во время ремонта проблематично выявить скрытые дефекты, такие, например, как дефекты стержней короткозамкнутого ротора или нарушение изоляции обмотки статора [3].
Выбор стратегии и методов диагностирования асинхронных двигателей определяется рядом факторов. Первостепенное значение имеет конечная цель диагностирования, которая зависит от того, на каком этапе жизненного цикла определяется техническое состояние двигателя: на этапе производства, эксплуатации или ремонта [4].
В настоящее время существует потребность диагностики состояния асинхронных электродвигателей в процессе их работы. Своевременно обнаруженное повреждение позволит избежать дальнейшего развития процесса, уменьшить время восстановления, сократить затраты на обслуживание, избежать простоев оборудования, повысить эффективность работы двигателей и производственных механизмов. Поэтому диагностика АД является уникальной научно-практической задачей.
2. Цель и задачи исследования, планируемые результаты
Целью магистерской работы является обзор существующих методов диагностики асинхронного электродвигателя и определение наиболее простого и качественного из них.
Основные задачи исследования:
- Обзор литературных источников и определение существующих методов диагностирования асинхронных двигателей.
- Выделение достоинств и недостатков этих методов на стадии разработки и при практическом применении.
- Выявление оптимального метода диагностики и разработка схемы его практической реализации.
Планируемые результаты:
- Определение наилучшего метода диагностики асинхронного двигателя в процессе эксплуатации.
- Разработка схемы практической реализации этого метода.
- Расчет и выбор всех необходимых компонентов.
- Практическая реализация этой схемы.
3. Обзор исследований и разработок
3.1 Виды неисправностей и общий вид системы их диагностики
Различают внутренние и внешние причины неисправностей двигателя. Внутренние неисправности делятся на механические (повреждения подшипников, изнашивание изоляции и обмоток) и электрические (пробой изоляции, повреждения магнитного контура, обрыв стержня ротора). Внешние неисправности могут быть механическими (плохой монтаж, пульсирующая нагрузка, перегруз), электрические (колебания напряжения, перебои в напряжение, неравномерное напряжение), на рисунке 1 показана относительная вероятность появления различных повреждений в асинхронном двигателе:
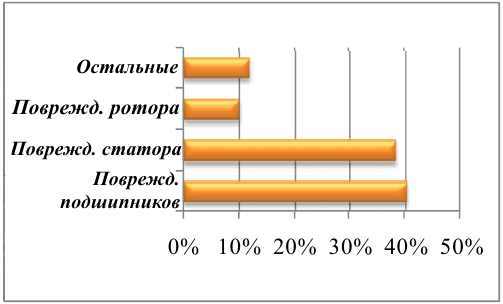
Рисунок 1 – Вероятность сбоев в АД в процентах
Дефекты подшипников могут быть классифицированы как распределенные
или локальные
. Распределенные дефекты включают в себя волнистость, шероховатость поверхности и элементы качения без изменения. Локализованные дефекты включают отскоки, ямы и трещины на поверхности качения. Эти локализованные дефекты создают серию ударных вибраций в тот момент, когда движущийся валик проходит по поверхности дефекта, период и амплитуда которого вычисляются по положению, скорости и несущей аномалии. Поврежденными подшипниками производятся механические вибрации. Эти колебания находятся на скорости вращения каждого компонента. Размеры подшипника и скорость вращения машины используются для определения характерных частот, связанных с дорожками качения, а также шарами или роликами. Состояние подшипника определяется путем изучения этих частот. Эта задача выполняется с использованием методов механического вибрационного анализа.
Неисправности в обмотке статора, такие как межвитковое короткое замыкание, обрыв цепи, межфазное замыкание и замыкание фазы с землей, являются одними из наиболее распространенных и потенциально разрушительных неисправностей. Если они не обнаружены, это может привести к катастрофическому сбою двигателя.
Неисправности ротора могут быть вызваны электрическими неисправностями, такими как обрыв стержня или механические сбои, такие как неcоосноcть ротора. Первая неисправность возникает из-за термических напряжений, горячих точек или перенапряжений во время переходных операций, таких как пуск, особенно в крупных двигателях. Сломанный стержень значительно меняет крутящий момент и становится опасным для работы электрических машин. Второй тип повреждения ротора связан с неравномерностью воздушного зазора. Эта ошибка является общим эффектом, связанным с рядом механических проблем в асинхронных двигателях, таких как дисбаланс нагрузки или несоосность вала. Неcоосность вала означает горизонтальное, вертикальное или радиальное смещение между валом и его сцепленной нагрузкой. При несоосности вала ротор будет смещен из своего нормального положения из-за постоянной радиальной силы.
Типичная диагностическая система, показанная рисунке 2, состоит из узла датчиков, который подает сигнал неисправности в блок обработки сигналов, который далее отправляет его результат для анализа экспертными системами, где в конечном итоге обнаруживается соответствующая неисправность.

Рисунок 2 – Система диагностики АД
(анимация: 6 кадров, 7 циклов повторения, 73,8 килобайт)
3.2 Методы диагностики асинхронного двигателя
Идеальный современный способ диагностирования электродвигателей должен отвечать следующим требованиям:
- высокая достоверность и точность выявления неисправностей и повреждений электродвигателя;
- возможность обнаружения всех или значительной части электрических и механических повреждений электродвигателя и связанных с ним механических устройств;
- проведение диагностических измерений дистанционно, что актуально в тех случаях, когда доступ к оборудованию затруднен;
- низкая трудоемкость диагностических работ (измерений) и простота проведения измерений;
- возможность проведения аналитической обработки полученных результатов измерений за короткое время, с применением вычислительных и программных средств, [5].
Ряд источников выделяют метод анализа спектров тока двигателя [1], [5], [6], [7], [8], [9]. Он используется для обнаружения повреждений ротора, несоосности а статоре и неравномерность воздушного зазора.
Анализ сигнатуры тока двигателя основан на обнаружении токовых гармоник с частотами, которые различают каждую категорию неисправностей. Кроме того, не требуется дополнительная установка измерительной системы. Сломанные стержни вызывают асимметрию ротора, искажение распределения тока ротора и, следовательно, изменения магнитодвижущей силы ротора (МДС). Повреждение стержней ротора имеет отличительную характеристику частот, которые могут быть вычислены как:

На единицу скольжения двигателя можно рассчитать, как:

где fs и fr – частота питания и частота двигателя соответственно
р – количество полюсов.
В случае повреждения стержня можно ожидать боковые полосы вокруг частоты питания в спектре мощности фазного тока. В результате боковые полосы (гармоники) первого порядка (k=1) имеют особое значение в обнаружение неисправности поврежденного стержня. Левая боковая полоса fs(1-2ks) обусловлена электрической или магнитной асимметрией ротора, вызванная повреждениями стержней ротора, в то время как правая боковая полоса fs(1+2ks) обусловлена пульсацией скорости или вибрацией.
Амплитуды и присутствие боковых полос зависят от физического положения неисправных стержней ротора, скорости и нагрузки. Расположение боковых полос будет смещаться наружу, если скорость и нагрузка увеличиваются. Доказано, что боковые полосы могут наблюдаться, когда электродвигатель не имеет поврежденных стержней ротора. Это обусловлено тем, что эллиптичность ротора и несоосность вала могут в определенной степени вызвать асимметрию ротора. Тем не менее, амплитуды боковых полос, сформированные в этих случаях, намного меньше по сравнению с теми, которые возникают при поврежденных стержнях ротора. В работе [6] использовались два неисправных двигателя, один с одним сломанным стержнем ротора, другой двигатель – с двумя сломанными стержнями. Роторы этих двигателей были просверлены и использованы в испытаниях для имитации повреждений стержней ротора, а затем сравнивались с исправным двигателем.
Рисунок 3 и рисунок 4 показывают два испытуемых ротора с одним и двумя поврежденными стержнями соответственно. Неисправности были вызваны аккуратным сверлением в стержнях вдоль их высоты таким образом, чтобы отверстие насквозь пронзило стержень.

Рисунок 3 – Ротор с одним поврежденным стержнем

Рисунок 4 – Ротор с двумя поврежденными стержнями
На рисунке 5 показаны спектры тока исправного и неисправного двигателей при разных нагрузках. Амплитуды боковых полос исправного двигателя равны -27,27 дБ (слева) и -34,38 дБ (справа), тогда как они составляют -16,19 дБ (слева) и -19,03 дБ (справа) в случае одного поврежденного стержня и -13,01 дБ (слева) и -14,80 дБ (справа) в случае двух поврежденных стержней. Разность амплитуд левых боковых полос в случае исправного ротора и ротора с двумя поврежденными стержнями составляет 14,26 дБ при 75% от полной нагрузки. Понятно, что амплитуда бокового диапазона увеличивается по мере увеличения нагрузки и степени серьезности неисправности, и что неисправность может быть лучше всего обнаружена при более высоких нагрузках.
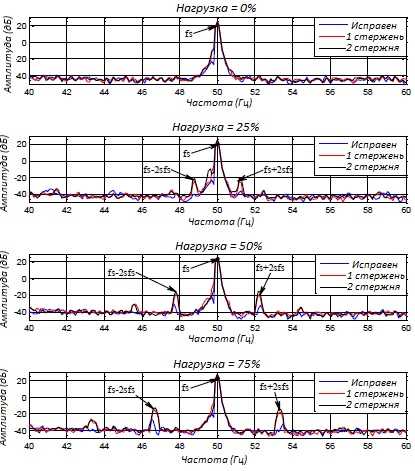
Рисунок 5 – Спектры тока асинхронного двигателя при разных нагрузках
В работе [7] был проведен похожий эксперимент, но с тремя поврежденными стержнями ротора.
Эффективным является и метод основанный на анализ вибрации двигателя [6], [7], [9]. Используя спектр вибрации двигателя, можно определить точную скорость и частоту сети, а также частоты, связанные с ошибками. Всегда присущ дисбаланс массы ротора и несоосность вала, что приводит к пиковым компонентам в частоте вращения двигателя и к возникновению гармоник в его вибрационном спектре. Как упоминалось ранее, в случае повреждения стержня ротора происходит колебание скорости с частотой 2sfs. Это колебание действует как частотная модуляция на частоте вращения и на двух частотах боковых полос (fr - 2sfr) и (fr + 2sfr), которые проявляют fr в спектре вибрации. Когда дисбаланс цепи ротора увеличивается, величина колебания скорости, а также величины частоты боковой полосы тоже увеличиваются. Следовательно, величины (fr ± 2sfr) могут быть хорошо измерены при обнаружении повреждений стержня. В работе [6] представлен результат проведения этого метода обнаружения поврежденного стержня с использованием вибрации.
На рисунке 6 показан спектр вибрации двигателя при различной нагрузке. На рисунке видны различия в боковых полосах между исправным состоянием и сломанным стержнем ротора на обеих сторонах спектра вибрации при 75% полной нагрузки. При нормальном состоянии амплитуды боковых полос первого порядка составляют -59,47 дБ (слева) и -55,18 дБ (справа) соответственно. При одном поврежденном стержне ротора амплитуда боковых полос увеличивается до -57,81 дБ и -54,52 дБ, разница составляет 4,29 дБ, а в случае двух поврежденных стержней боковые полосы достигают -53,35 и -49,05 дБ.
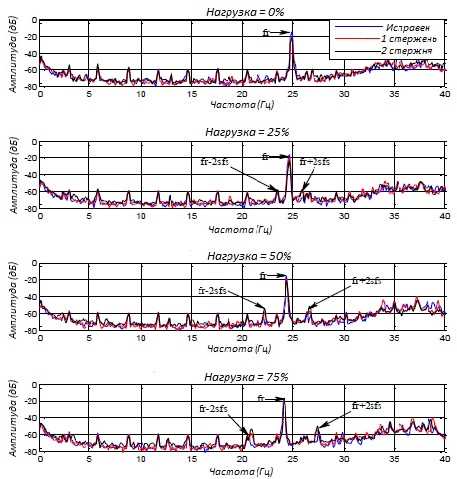
Рисунок 6 – Спектры вибрации асинхронного двигателя при разных нагрузках
В работе [7] с помощью спектра вибрации показаны обнаружения повреждений в подшипниках двигателя.
В работах [7], [8] выделяются также интеллектуальные методы. К ним относят cистемы с фази логикой, искусственные нейронные сети, а также фази-нейронные сети. Нейронная сеть может быть использована, чтобы обнаружить, собственную асимметрию и отрицательную частоту сопротивления.
На рисунке 7 представлена схема нейронных сетей для мониторинга состояния асинхронного двигателя [7].
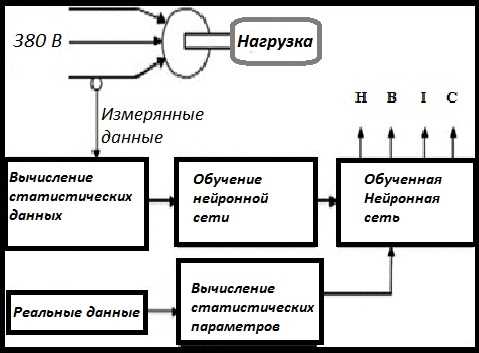
Рисунок 7 – Система диагностики АД с нейронной сетью
Работа [8] представляет собственный метод обнаружения неисправностей и диагностики неисправности переключающего устройства в асинхронном электродвигателе с инвертором напряжения ШИМ. Метод основан на стандартной модели тока статора (рисунок 8)
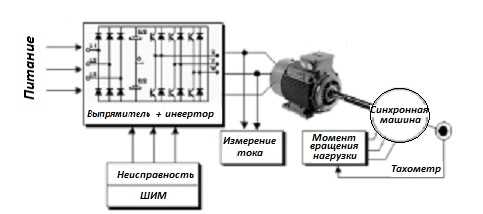
Рисунок 8 – Система диагностики АД с инвертором напряжения ШИМ
Также известны методы, основанные на анализе акустических колебаний, создаваемых работающей машиной, методы, основанные на измерении и анализе магнитного потока в зазоре двигателя и внешнего магнитного поля, методы, основанные на измерении и анализе температуры отдельных элементов машины, методы диагностики механических узлов (в частности подшипников) основанные на анализе содержания железа в масле, методы диагностики состояния изоляции [9].
По сопоставлению всех технических, методологических и экономических факторов можно сделать вывод, что для практической реализации наиболее перспективными являются методы диагностики АД, основанные на анализе электрических параметров двигателя, а именно спектров напряжений и токов.
4. Технические требования к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя
Для вывода технических требований к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя, был рассмотрен и проанализирован ряд источников.
Так в публикации [10] основные исследования проводились с такими частотами: спектр тока при неотбалансированном роторе – 120 Гц, вибрация подшипников – 180 Гц, при износе подшипников – 1000 и 3000 Гц.
В статье [11] указывается, что в общем случае при цифровой регистрации токов удовлетворительная точность имеет место при частотах их фиксации в (20 ÷ 30) раз больше частоты сети f1.
В статьях [5] и [9] для сравнения работы нового двигателя и двигателя, прослужившего некоторое время, был выбран диапазон частоты в 1000 Гц, а конкретные примеры диагностики дефектов двигателя проводилась на меньшем диапазоне (150 Гц и ниже).
На основании вышеприведенной информации делаем вывод, что частота дискретизации измерительного канала должна находится в пределах от 1500 до 3000 Гц.
Выводы
На сегодняшний день уже существует множество методов диагностики состояния асинхронного двигателя в процессе его эксплуатации. Все они до сих пор совершенствуются, что подтверждает их актуальность и практическую работоспособность.
В данной работе были рассмотрены наиболее известные из них, и выделено, что наиболее перспективными для практической реализации являются методы диагностики асинхронного двигателя, основанные на анализе электрических параметров двигателя, а именно спектров напряжений и токов. А также выдвинуто требование к частоте дискретизации измерительных каналов для этого метода.
Дальнейшие исследования направлены на следующие аспекты:
- Выбор оптимальной структуры схемы практической реализации метода диагностики асинхронного двигателя;
- Расчет и выбор необходимого оборудования;
- Представление рабочей схемы для практической реализации диагностики асинхронного двигателя в процессе его эксплуатации.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2017 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Fang Duan Diagnostics of rotor and stator problems in industrial induction motors// Adelaide University: [Электронный ресурс]. – URL: https://digital.library.adelaide.edu.au/dspace/bitstream/2440/65202/8/02whole.pdf
- Ширман А.Р., Практическая вибродиагностика и мониторинг состояния механического оборудования/ Ширман А.Р., Соловьев А.Б. – Москва, 1996. 276с.
- Полковниченко Д.В. Послеремонтная оценка технического состояния короткозамкнутых асинхронных электродвигателей// eNTUKhPIIR: [Электронный ресурс]. – URL: http://repository.kpi.kharkov.ua/bitstream/KhPI-Press/11713/1/EE_2005_1_Polkovnichenko_Posleremontnaya.pdf .
- Генкин М.Д. Виброакустическая диагностика машин и механизмов/ Генкин М.Д., Соколова А.Г. – М.: Машиностроение, 1987. 288 с.
- Петухов В.С Диагностика состояния электродвигателей на основе спектрального анализа потребляемого тока/ Петухов В.С Соколов В.А.// [Электронный ресурс]. – URL: http://www.tesla.ru/publications/files/051.pdf .
- A. Alwodai, F. Gu, A.D. Ball A Comparison of different techniques for induction motor rotor fault diagnosis/ 25th International Congress on Condition Monitoring and Diagnostic Engineering, IOP Publishing, Journal of Physics: Conference Series 364, 012066, 2012.
- Partha Sarathee Bhowmik, Sourav Pradhan, Mangal Prakash Fault diagnostic and monitoring methods of induction motor: a review/ International Journal of Applied Control, Electrical and Electronics Engineering (IJACEEE), Vol. 1, no. 1.
- Demba Diallo, Mohamed Benbouzid, Denis Hamad, Xavier Pierre Fault detection and diagnosis in an induction machine drive: A pattern recognition approach based on concordia stator mean current vector// Archive Ouverte HAL-UPMC: [Электронный ресурс]. – URL: http://hal.upmc.fr/file/index/docid/526691/filename/IEEE_TEC_2005_DIALLO.pdf.
- Сидельников Л.Г. Контроль технического состояния асинхронных двигателей в процессе эксплуатации/ Сидельников Л.Г., Афанасьев Д.О. – Пермский национальный исследовательский политехнический университет.
- Habtler T.G. и Harley R.G. Diagnostics and intelligent controls in electrical systems – Georgia Institute of Technolgy/ АРЕС 25 February 2004.
- Сивокобыленко В.Ф. Диагностика асинхронного электропривода по данным измерений рабочего режима/ Сивокобыленко В.Ф. Полковниченко Д.В., Кукуй К.А. – Донецкий национальный технический университет: [Электронный ресурс]. – URL: http://ea.donntu.ru/bitstream/123456789/7204/1/7_2003.pdf.