Аннотация
Несмотря на то, что асинхронные двигатели являются высоконадежными, они подвержены многим видам неисправностей, которые могут стать катастрофическими и вызвать остановку производства, травмы персонала и порчу сырья. Неисправности асинхронного двигателя могут быть обнаружены на начальном этапе, что позволяет предотвратить полный отказ системы и непредвиденные издержки производства.
Целью данной статьи является анализ различных неисправностей питаемой от инвертора асинхронной машины. Проведенные лабораторные испытания дают надежду, что представленные исследования будут очень полезны для отрасли силовой электроники в промышленности.
Ключевые слова:
ШИМ-инвертор, Двигатель постоянного тока, приводная система, опыт холостого хода и короткого замыкания.
Введение
Изучение поведения асинхронного двигателя при неблагоприятных условиях из-за наличия неисправностей и возможность диагностировать эти аномальные условия была сложной темой для многих исследователей электрических машин. Асинхронный двигатель был создан как рабочая лошадка промышленности с 20-го века. Регулирование скорости двигателей переменного тока является неотъемлемым требованием в промышленности, для обеспечения лучшей производительности с высокой степенью качественной согласованности. Хотя недавние разработки в силовой электронике и контроллерах вызвали некоторые очень существенные альтернативы привода, такие как двигатель с переключаемым сопротивлением, постоянными магнитами и бесщеточный двигатель постоянного тока; они еще не стали очень популярными и экономически эффективными для широкого спектра применений, особенно во влажной, пыленепроницаемой и огнестойкой среде. Поэтому широкое использование асинхронных двигателей по-прежнему является экономически выгодным, а также популярным и, вероятно, продолжиться в течение следующих нескольких десятилетий.
Преобразователи частоты широко используются во всех областях промышленности. К ним относятся транспортные системы, такие как корабли, железные дороги, лифты, конвейеры, установки для обработки материалов и муниципальные предприятия для механического оборудования, например, станков, экструдеров, вентиляторов, насосов и компрессоров. Разработка новых силовых полупроводниковых приборов и концепций позволяет реализовать новые функции и эксплуатационные характеристики преобразователей частоты переменного тока, и еще больше ускоряет их проникновение в эти отрасли. Применение новых компонентов силовой электроники также привело к существенному изменению положения приводов переменного и постоянного тока на рынке. Прочная конструкция приводов переменного тока открыла им множество новых областей применения, тем самым предоставив пользователю и производителю дополнительный потенциал для повышения их производительности, и тем самым сохранить свои экономические и технические конкурентные преимущества.
Концепция приводных систем
При сравнении динамические характеристики двигателя постоянного тока независимого возбуждения с асинхронным двигателем, последний представляет собой гораздо более сложный объект управления. Это связано с тем, что основное распределение тока возбуждения и тока якоря двигателя постоянного тока фиксировано в пространстве и может управляться независимо, тогда как в случае двигателя переменного тока эти величины неразрывно связаны. Это конструктивное ограничение делает структуру управления асинхронным двигателем более сложной и нелинейной. Сложность аппаратного оборудования возрастает по мере жесткости требований пользователя к техническим характеристикам. Трудности возникают также из-за питания от источника переменной частоты, обработки сигнала переменного тока и относительно сложной динамики машины переменного тока.
ШИМ-инверторы
Одним из лучших способов контроля момента и скорости асинхронного двигателя является внедрение инверторов переменного напряжения и частоты. Инверторы, используемые для преобразователя частоты, должны иметь возможность варьировать как напряжение, так и частоту в соответствии со скоростью и другими контролируемыми параметрами. Самый простой способ добиться этого контроля – с помощью шестиступенчатого инвертора. Однако, этот метод имеет следующие ограничения:
- Наличие гармоник низкого порядка, из-за которых увеличиваются потери двигателя на всех скоростях, приводя к снижению мощности двигателя.
- Наличие пульсаций момента на низких скоростях из-за возникновения гармоник более низкого порядка.
- Увеличение содержания гармоник на низких скоростях, что увеличивает потери двигателя. Также увеличение отношения V/f на низкой скорости для компенсации падения сопротивления статора может привести к тому, что более высокий ток двигателя будет протекать при малых нагрузках из-за насыщения. Эти эффекты могут перегревать машину на низких скоростях.
Эти ограничения шестиступенчатого инверторного привода преодолеваются в широтно-импульсно-модулированном (ШИМ) инверторе. Основная блок-схема преобразователя ШИМ показана на рисунке 1.
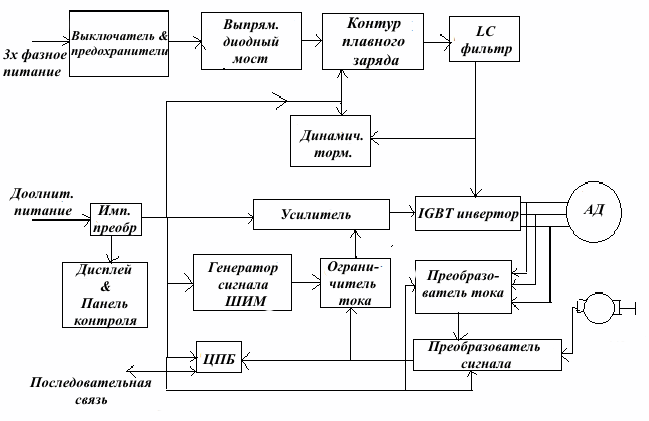
Рисунок 1 – Основная блок-схема преобразователя ШИМ
Из-за содержания низших гармоник в выходном напряжении диодного моста, а также из-за наличия гармоник во входном токе инвертора ШИМ, требование к размеру фильтра в таких системах невелико. Таким образом, система привода обеспечивает плавную работу на низкой скорости, без пульсации крутящего момента, что приводит к снижению мощности двигателя и повышению общей эффективности. Кроме того, из-за неизменного напряжения шины постоянного тока, количество ШИМ -преобразователей со связанными с ними двигателями может быть запитана с общего диодного моста. Однако эти преимущества достигаются за счет усложнения системы управления и повышения потерь из-за высокой частоты переключений.
Обзор различных неисправностей
В настоящее время в промышленных установках используется большое разнообразие двигателей. Они обеспечивают широкий спектр характеристик, требуемых для конкретных задач. Двигатели для всех видов работы и с различными характеристиками требуют адекватной защиты. Поэтому важно, чтобы характеристики двигателей были тщательно изучены и рассмотрены перед применением систем защиты. Преобразователь питаемый трехфазным напряжением может создавать различные типы неисправностей, как показано на рисунке 2.
- Замыкание одной питающей фазы на землю F1.
- Короткое замыкания выпрямительного диода F2.
- Замыкание на землю шины постоянного тока F3.
- Короткое замыкание конденсатора промежуточного контура F4.
- Повреждение (обрыв) базы транзистора F5.
- Замыкание транзистора F6.
- Межфазное замыкание в клеммах машины F7.
- Однофазное включение в клеммах машины F8.
Трехфазный инвертор напряжения может быть подвержен любой из вышеперечисленных неисправностей, но наиболее распространенным является Повреждение (обрыв) базы транзистора и пробой.
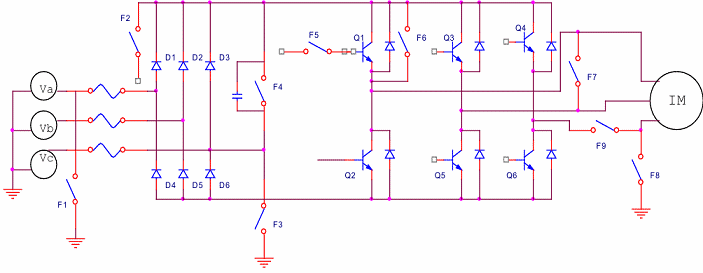
Рисунок 2 – Режимы повреждений в ШИМ инверторе
Анализ различных неисправностей
Различные режимы неисправностей машины применяются и практически тестируются на асинхронном двигателе при фиксированной нагрузке 5 Нм и фиксируемом задание на скорость 314,16 рад/с (1500 оборотов в минуту) с ограничением тока 10 А.
Замыкание одной питающей фазы на землю
Одна из клемм двигателя замыкается на землю во время работы двигателя на заданной установившейся скорости. На рисуноке 3 представлены осциллограммы зависимостей скорости, тока и момента от времени. Из осциллограмм видно, что, хотя пульсации крутящего момента являются высокими, двигатель может работать со сниженной нагрузкой в зависимости от требований оборудования. Кроме того, ток перегруза выше, чем пусковой ток. Следовательно, этот аспект должен учитываться при проектировании системы привода.
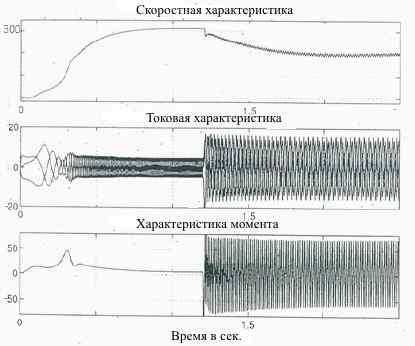
Рисунок 3 – Замыкание одной фазы на землю
Обрыв фазы
Когда двигатель работает в установившихся условиях, возможен обрыв фазы. Формы сигналов на рисунке 4 показывают, что неисправность возникает в момент времени t = 1,2 сек. Очевидно, что, хотя пульсации крутящего момента высоки, можно запустить двигатель с уменьшенной нагрузкой. Пульсации крутящего момента тут относительно меньшие чем в случае коротко замыкания фазы на землю. Кроме того, ток перегруза почти эквивалентен пусковому току.
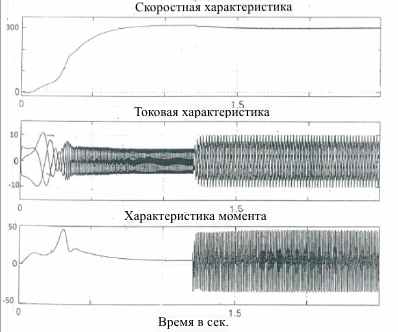
Рисунок 4 – Обрыв фазы
Межфазное замыкание
В этом случае, одна из клемм двигателя соприкасается с другой, когда двигатель работает на заданной установившейся скорости и установленным значением крутящего момента в соответствии с ограничением тока. Из рисунка 5 видно, что после того, как возникает неисправность при t = 1,2 сек, ток и крутящий момент медленно затухают до нуля. Таким образом, двигатель не может продолжать работать в этом состоянии.
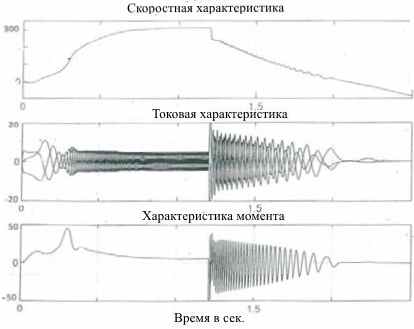
Рисунок 5 – Межфазное замыкание
Обрыв двух фаз
Две входные клеммы двигателя размыкаются во время работы двигателя с заданным значением крутящего момента, ограничением по току и скорости. На осциллограммах на рис. 6 показано, что после того, как возникает неисправность при t = 1,2 сек, ток и крутящий момент медленно затухают до нуля. Время, затрачиваемое характеристиками тока и крутящего момента на снижение до нуля, больше по сравнению с предыдущим случаем, когда две клеммы были закорочены. Эти результаты показывают, что двигатель не может продолжать работать в этом состояние.
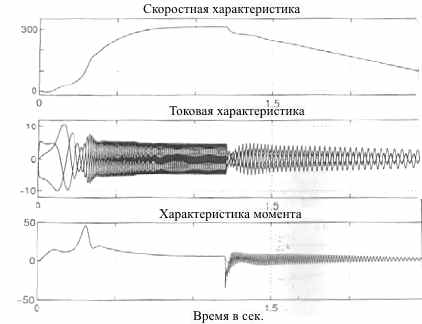
Рисунок 6 – Обрыв двух фаз
Обрыв трех фаз
Все три клеммы двигателя могут оборваться, во время работы двигателя в установившемся состоянии. Как видно из рисунка 7, ток и крутящий момент немедленно достигают нуля, как только возникает неисправность. Следовательно, в этом состоянии невозможно продолжить работу двигателя.
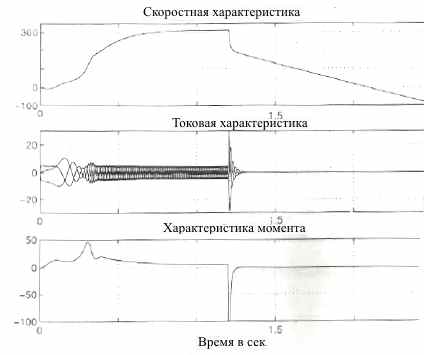
Рисунок 7 – Обрыв трех фаз
Трехфазное замыкание
Когда двигатель работает под заданными значениями крутящего момента, ограничения по току и скорости, может случиться, что все три клеммы двигателя замыкаются. Как показывает осциллограмма на рисунке 8, как только возникает неисправность, ток и крутящий момент сразу достигают нуля. Этот процесс занимает немного больше времени по сравнению с осциллограммой на рисунке 7. В результате двигатель не может продолжать работать в этом состоянии.
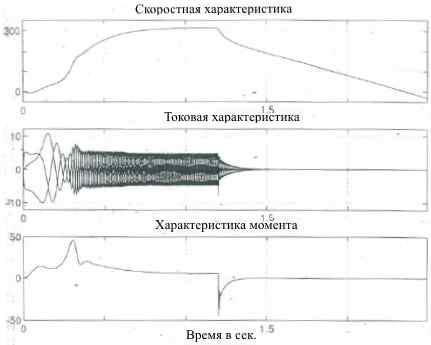
Рисунок 8 – Трехфазное замыкание
Заключение
Всестороннее исследование, проведенное в шести случаях сбоев машины, показало, что двигатель может работать только при обрыве или коротком замыкании только одной фазы. Продолжительность времени, в течение которого оператор может позволить двигателю работать в этих двух условиях отказа, зависит от перегрузочной способности двигателя и надежности изоляции. Экспериментальные результаты исследования следует учитывать при разработке системы привода, поскольку силовые полупроводниковые приборы очень чувствительны к условиям неисправности. Представленные исследования дают надежду, что будут очень полезны в промышленности для повышения надежности схем силовой электроники.
Список использованной литературы
1. General Electric SCR Manual; GE, Schenectady, N.Y. USA, 1979.
2. T. L. Grant & T. H. Barton, “Control Strategies for PWM Drives”, IEEE Transactions on Industry Applications, Vol. IA-16, March/April 1980, pp. 211-216.
3. D. A. Grant, J. A. Houldsworth & K. N. Lower, “A New High Quality PWM AC Drive”, IEEE
Transactions on Industry Applications, Vol. IA-19, March/April 1983, pp. 211-216.
4. W. Shepherd and L. N. Hulley; Power Electronics and Motor Control; Cambridge University Press UK, 1987.
5. Hamid Nejjari & Mohamed El Hachemi Benbouzid, “Monitoring and Diagnosis of Induction Motors Electrical Faults Using a Current Park’s Vector Pattern Learning Approach”, IEEE Transactions on Industry Applications, Vol. 36, No. 3, May/June 2000.
6. Thomas M. Jahns and Vladimir Blasko, “Recent Advances in Power Electronics Technology for Industrial and Traction Machine Drives”, Proceedings of IEEE, Vol. 89, No. 6, June 2001.
7. Klima, J., “Analytical investigation of an induction motor drive under inverter fault mode operations”, IEE Proceedings Electrical Power Application, Vol. 150, No. 3, May 2003, pp. 255-262.
8. B. Lu and S. Sharma, “A literature review of IGBT fault diagnostic and protection methods for power inverters,” in Proceedings of the 43rd IEEE Industrial Applications Society Annual Meeting (IAS"08), October 2008.
9. M. Abul Masrur, ZhiHang Chen and Yi Lu Murphey, “Intelligent Diagnosis of Open and Short Circuit Faults in Electric Drive Inverters for Real-Time Applications”, IET-Power Electronics (Journal), March 2009.
10. C. M. Bhatia, Sanjana Malhotra “Knowledge Based Protection Circuits for Converter and Inverter Applications”, IEEE Conference, ICCPE 10, NSIT New Delhi, January 2011.