
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Теоретическая часть
- 3.1 Общие сведения о машине двойного питания (МДП)
- 3.2 Выбор исследуемых двигателей и их характеристики
- 3.3 Математическое описание АД
- 4. Система регулирования реактивной мощности и скорости АД
- 4.1 Описание функциональной схемы системы управления
- 4.2 Вычисление реактивной мощности. Объект регулирования реактивной мощности
- 4.3 Регулирование скорости АД
- 5. Моделирование
- 5.1 Общая модель, ее описание и принцип работы
- 5.2 Результаты моделирования. Регулирование реактивной мощности при постоянной скорости
- Выводы
- Список источников
Введение
В современной мировой экономике, энергетика, представляет собой системообразующую отрасль, которая в последние 15 лет развивается опережающими темпами. Рост численности населения, а также развитие научно-технического прогресса, ведет к экспоциональному росту потребности в энергии. В настоящее время основным сырьем, используемым для производства энергии в мире, является добываемое из недр земли – углеводородное топливо (нефть, газ и угль). Повышение потребности в энергии вызывает необходимость в увеличении добычи углеводородов, в результате чего происходит истощение их запасов. Повсеместное использование углеводородного топлива во всех отраслях экономики и отсутствие реальной альтернативы их замене, делают экономику страны уязвимой к рискам, связанных с природно-климатическими и экономическими проблемами. Кроме того, использование данного вида топлива, вызывает значительное число экологических проблем, негативный эффект которых уже очевиден в масштабах планеты, в результате чего развитие альтернативных источников энергии является одним из актуальных направлений в области построения энергетики будущего. [1]
1. Актуальность темы
Актуальность работы определяется переходом современного промышленного производства к применению энергосберегающих технологий. Использование машины двойного питания (МДП) в современных автоматизированных системах позволяет существенно повысить технико-экономические показатели различных технологических установок. Например, одним из наиболее перспективных направлений является использование энергии ветра в асинхронной машине с прямым питанием со стороны статора и питанием через обратимый преобразователь со стороны ротора. [2]:
- отдача активной мощности со стороны статора при переменной частоте вращения и постоянной частоте сети;
- отдача активной мощности со стороны ротора при частоте вращения выше номинальной;
- малая установленная мощность преобразователя.
Одним из основных направлений перехода является замена существующих регулируемых электроприводов (ЭП) постоянного тока на электроприводы переменного тока, обладающие лучшими массогабаритными, энергетическими и динамическими характеристиками. Наибольшее распространение среди электроприводов переменного тока получил ЭП на базе асинхронного двигателя с короткозамкнутым ротором (АДКЗ) с преобразователем частоты в статорной цепи. Использование в данном электроприводе режима векторного регулирования позволяет разделять каналы управления потокосцепления и электромагнитным моментом, что дает возможность строить системы подчиненного регулирования аналогично ЭП постоянного тока. Однако электропривод на базе АДКЗ обладает рядом недостатков, такими как: низкая перегрузочная способность на частотах вращения ротора выше номинальной, невысокий диапазон регулирования скорости вниз от номинальной без датчика скорости на валу двигателя и невозможность управления энергией скольжения. Диапазон регулирования скорости вниз от номинальной без датчика на валу двигателя обычно не превышает 1:50, что связано со сложностью обеспечения работы векторной системы управления на низких частотах тока статора. Для обеспечения глубокого регулирования скорости вниз от номинальной необходимо использовать датчик на валу, который снижает надежность электропривода. Устранение указанных выше недостатков возможно в электроприводе на базе машины двойного питания (МДП).
2. Цель и задачи исследования, планируемые результаты
Магистерская работа посвящена исследованию машины двойного питания с прямым питанием со стороны статора и питанием через обратимый преобразователь со стороны ротора.
Цель исследований: описание принципов работы электроэнергетической установки на базе МДП для использования энергии ветра.
Для достижения поставленной цели, необходимо решить следующие задачи:
- изучить физику процессов МДП;
- разработать математические модели МДП;
- разработать систему управления электроприводом на базе МДП предполагающую отдачу энергию ветра в сеть.
3. Теоретическая часть
3.1 Общие сведения о машине двойного питания (МДП)
Прежде чем перейти к конкретному описанию математической модели МДП, рассмотрим, что собой представляет такая машина. Машина двойного питания — конструктивно это асинхронная машина с фазным ротором, имеющая раздельное питание обмоток статора и ротора, при этом сумма (разность) частот тока питания кратна частоте вращения вала. Например, если обмотка статора двигателя запитана частотой 50 Гц, а обмотка фазного ротора — частотой 10 Гц, то частота вращения (при двухполюсных обмотках) ротора может быть, в зависимости от порядка чередования фаз ротора, 40 или 60 об/сек. Но принцип действия МДП соответствует синхронной машине, поскольку токи в роторе получаются не за счёт скольжения последнего относительно поля статора, а за счёт подачи тока от внешнего источника. МДП могут работать как в двигательном, так и в генераторном режиме [3].
Недостатками машин двойного питания являются:
качание
ротора, аналогичноекачанию
у обычных синхронных машин, что может вызывать выпадение из синхронизма;- наличие скользящих контактов для передачи тока на ротор. В отличие от синхронных машин, подаваемая на ротор мощность может достигать половины всей мощности машины (у синхронной машины примерно 1-5%). Эта мощность примерно пропорциональна частоте питающего тока. Этот недостаток удалось устранить в бесконтактной машине двойного питания.
Преимущества машин двойного питания:
- возможность работы с частотой вращения вала 6000 об/мин при питании от промышленной сети и, как следствие, получить удвоенную мощность при тех же размерах, значениях магнитного потока и крутящего момента;
- использование для управления двигателем статических преобразователей половинной мощности;
- возможность удвоения напряжения в генераторе за счёт последовательного соединения обмоток статора и ротора.
3.2 Выбор исследуемых двигателей и их характеристики
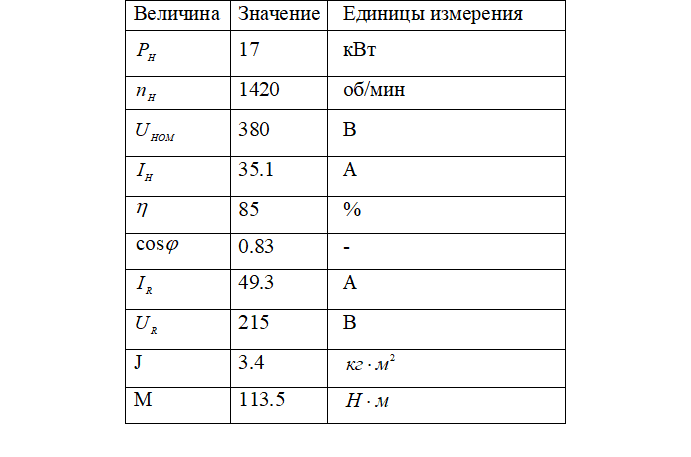
При проведении исследования машины двойного питания, для упрощения вычислений и анализа результатов, возьмем любую асинхронную машину с фазным ротором в качестве предмета исследования. Например, возьмем АД типа АОК2-51-4Т2. Его технические данные приведены ниже в таблице 1.1.
Таблица 1.1 – Технические данные двигателя №1 [4]
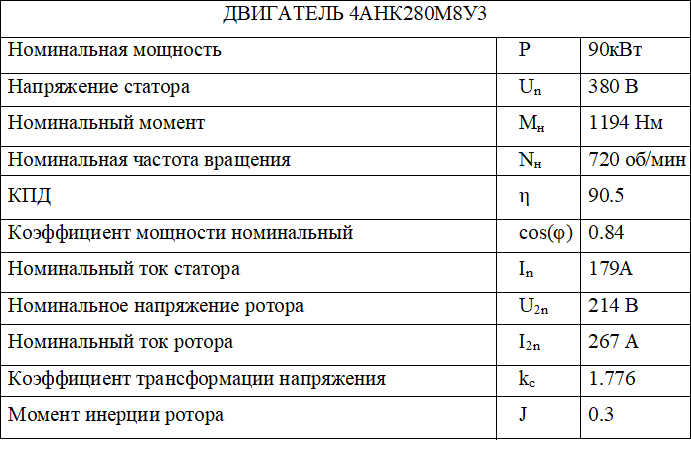
Для проверки методики реализации регуляторов мощности и скорости, возьмем еще один АД с фазным ротором типа 4АНК280М8У3. Его характеристики приведены в таблице 1.2.
Таблица 1.2 – Технические данные двигателя №2 [5]
3.3 Математическое описание АД
При векторном управлении со стороны ротора одним из возможных является использование закона управления ΨS=const.
Введем обобщенные векторы напряжений US и UR, токов IS и IR, потокосцеплений ΨS и ΨR статора и ротора с помощью математического описания, называемого уравнениями Парка-Горева.
Уравнения баланса напряжений цепей статора и ротора имеют вид:
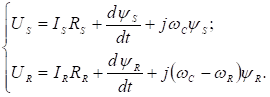
Уравнения связи между токами и потокосцеплениями:
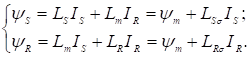
Пользуясь уравнениями баланса напряжений цепей статора и ротора, а также уравнениями связи между токами и потокосцеплениями, исключим векторы IS,ΨR с помощью уравнений:
![]()
В результате после преобразований можно получить уравнения баланса напряжений статора и ротора АД:

![]()
где ![]() – эквивалентное активное сопротивление АД;
– эквивалентное активное сопротивление АД;
TS=LS/RS – постоянная времени роторной цепи АД.
Разложим последние уравнения на составляющие с учетом условия ![]() . В результате можно получить две системы скалярных уравнений:
. В результате можно получить две системы скалярных уравнений:

![]()
Второе уравнение представляет собой условие точной ориентации системы координат d,q по вектору потокосцепления статора.
 ,
,
где ΨSq=0, kS=Lm/LS – коэффициент электромагнитной связи статора.
Уравнение электромагнитного момента получится в виде:
![]()
Используя полученные уравнения, а также уравнение движения,
![]()
можно построить структурную схему, где ![]() эквивалентная постоянная времени электромагнитных контуров АД.
эквивалентная постоянная времени электромагнитных контуров АД.
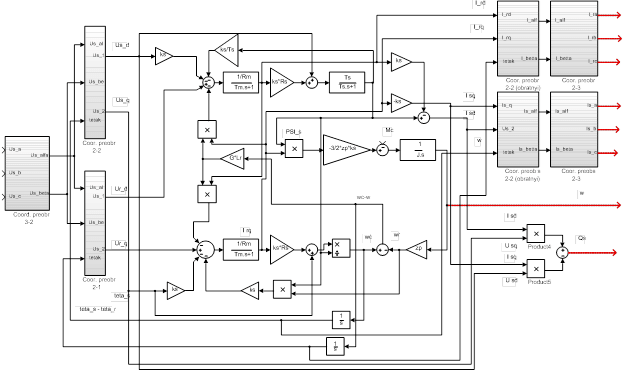
Рисунок 1 – Структурная схема АД при управлении со стороны ротора с регулированием потокосцепления статора
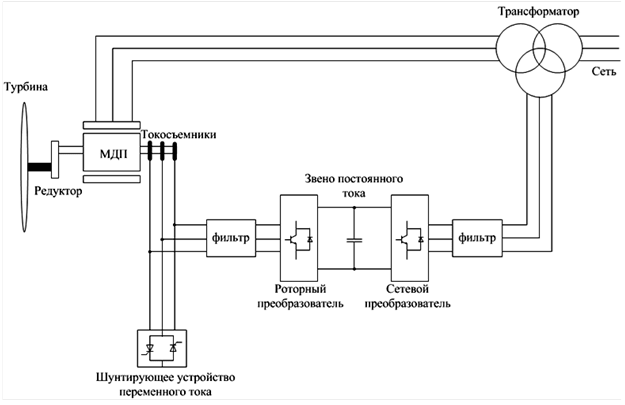
Рисунок 2 – Компоненты машины двойного питания
Рисунок 3 – Поток активной мощности МДП во время работы на сверхсинхронной и субсинхронной скоростях [6]
(анимация: 4 кадра, 7 циклов повторения, 27 килобайт)
Предельно достижимые динамические характеристики привода с учетом заданных физических ограничений его энергетического канала можно получить только в системах с релейными принципами управления, так как именно они позволяют максимально использовать имеющийся в системе ресурс управления. Часто это достигается в ущерб энергетическим показателям электропривода, например, сопровождается увеличением дополнительных потерь системы "инвертор напряжения – двигатель", вызываемых высокочастотными коммутациями ключей инвертора.
Релейный контур тока реализует скользящий режим слежения за мгновенными значениями токовых ошибок, формирует энергетически эффективные алгоритмы переключения ключей инвертора, нечувствителен к параметрам двигателя и к ограниченным по величине ошибкам измерения вектора эквивалентного напряжения, обеспечивает максимально полное использование имеющегося в приводе ресурса управления в динамических режимах больших отклонений токовых ошибок.
К преимуществам использования в СУ релейных регуляторов относится:
• астатизм к параметрическим и координатным возмущениям;
• высокая точность и быстродействие;
• возможность работы в режиме энергосбережения за счет уменьшения числа коммутаций.
4. Система регулирования реактивной мощности и скорости АД
4.1 Описание функциональной схемы системы управления
Система управления МДП условно разделяется на управление роторным и статорным преобразователями. На рисунке 4 представлена структурная схема системы управления роторным преобразователем [6].
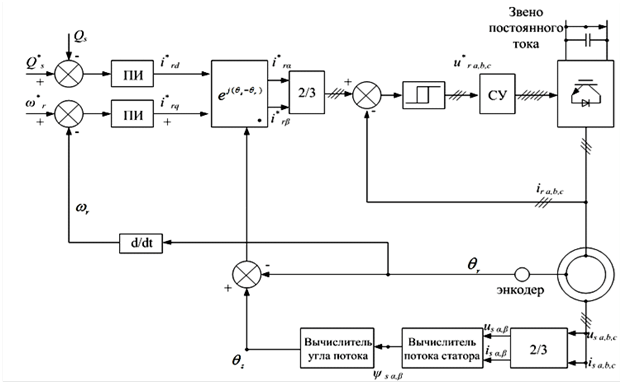
Рисунок 4 – Структурная схема векторного управления роторного преобразователя с использованием релейного регулятора тока ротора
Опорная q-составляющая тока ротора i*rqможет быть получена либо из внешнего контура регулирования скорости (КРС) или от опорного крутящего момента, приложенного к машине. Эти два варианта могут называться системой управления скорости или системой управления моментом для генератора, вместо регулирования активной мощности напрямую. Для системы регулирования скорости, один внешний ПИ-регулятор должен контролировать сигнал рассогласования и ограничиваться максимальным пределом. Также, еще один ПИ-регулятор добавляется для получения опорной d-составляющей тока ротора i*rd для регулирования реактивной мощности, требуемой от генератора. Если предположить, что вся реактивная мощность к машине подается со стороны статора, то заданное значение i*rd может быть равно нулю. Динамикой переключения полупроводникового роторного преобразователя можно пренебречь, и предполагается, что он может переключиться в любой момент времени. В данной системе управления измеряются токи статора и ротора, напряжения статора и механическое положение ротора. Нет необходимости измерять ЭДС-индукции ротора, как в случае с коммутируемыми преобразователями. Так как статор подключен к сети, а также влияние сопротивление статора мало, ток намагничивания статора можно считать постоянным. Роторный преобразователь обеспечивает различную частоту возбуждения в зависимости от условий нагрузки, например, скорости ветра. Индукционная машина управляется в синхронно вращающейся системе координат dq, где ось d ориентирована вдоль вектора потока статора и они совпадают. Это называется ориентацией векторного управления по потоку статора. Таким образом осуществляется раздельное управление между электромагнитным моментом и током возбуждения. Следовательно, активная мощность и реактивная мощность управляются независимо друг от друга [7].
Угол потокосцепления статора вычисляется по формуле:
где θs – угол поворота системы координат, вращающейся синхронно с вектором потокосцепления статора, (θs-θr) – угол поворота системы координат ротора.
Похожий принцип управления через dq токи выполнен и для полупроводникового сетевого преобразователя, где таким же способом осуществляется управление dq токами преобразователя.
На рисунке 5 представлена структурная схема системы управления сетевым преобразователем.
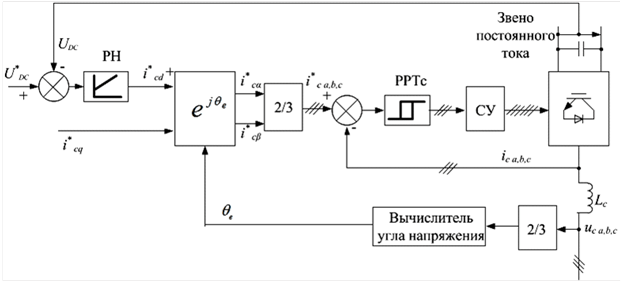
Рисунок 5 – Структурная схема векторного управления сетевого преобразователя с использованием релейного регулятора тока статора
Сетевой преобразователь регулирует величину поступающей в сеть активной и реактивной мощности посредством взаимодействия с сетевой индуктивностью. Целью сетевого преобразователя является поддержание постоянного напряжения в звене постоянного тока независимо от величины и направления мощности ротора. Метод векторного управления используется с системой отсчета ориентированной по положению вектора потокосцепления статора и позволяет независимо управлять активной и реактивной мощностью, протекающей между сетью и преобразователем [8].
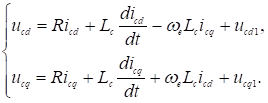
Уравнениями напряжения в синхронно вращающейся системе координат-dq являются:
Угловое положение сетевого напряжения вычисляется как:
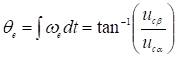
где ucα и ucα являются неподвижными составляющими напряжения сетевого преобразователя.
Ось d системы отсчета находится относительно сетевого напряжения в угловом соотношении θe. Поскольку амплитуда сетевого напряжения является постоянной, то ucd=0, ucq=const. Активная и реактивная мощность будет пропорциональна icd и icq соответственно. Это демонстрирует, что активная и реактивная мощность сетевого преобразователя управляются изменением составляющих тока icd и icq.
4.2 Вычисление реактивной мощности. Объект регулирования реактивной мощности
Реализованный в модели регулятор реактивной мощности работает в режиме обеспечения постоянства заданной реактивной мощности МДП (Q*). Обеспечение постоянство выдачи или потребления реактивной мощности МДП в эксплуатационных режимах МДП используются часто. Например, как показал анализ технических характеристик современных ВЭУ, он реализуется практически во всех схемах управления, поскольку позволяет организовать работу ВЭУ с нулевым балансом реактивной мощности. Регулятор формирует сигнал тока Idr на основе разности заданной реактивной мощности Q* и действующей на данный момент времени мощности Q.
Структурная схема регулятора представлена на рисунке 6.
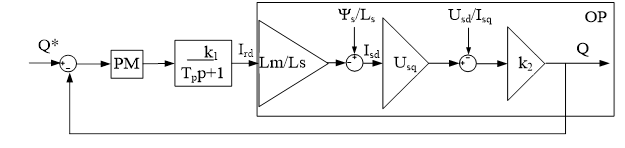
Рисунок 6 – Структурная схема регулятора реактивной мощности
Вычисления реактивной мощности в модели исследования МДП будут проводиться по формуле:

Подсистема вычисления активной, реактивной и полной мощности представлена на рисунке 7.
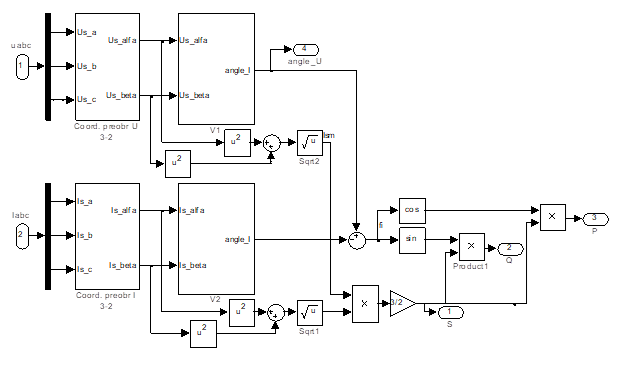
Рисунок 7 – Подсистема вычисления мощностей
Для регулирования реактивной мощности выберем И-регулятор. Подсистема регулятора представлена на рисунке 8.
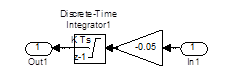
Рисунок 8 – Регулятор реактивной мощности
Настройка регулятора выполняется экспериментальным путем. При этом отключается внешний контур регулирования скорости. Значения реактивной мощности задаются с помощью блока Step и после анализа графиков, выбирается наиболее оптимальный коэффициент регулятора. Экспериментальным путем было установлено, что для двигателя 4АНК280М8У3 оптимальный коэффициент Ki=-0.05, для двигателя АОК2-51-4Т2 – Ki=-1.
4.3 Регулирование скорости АД
Регулятор формирует сигнал тока Irq на основе разности заданной скорости w* и действующей на данный момент времени скорости w. Контур регулирования скорости является внешним по отношению к контуру регулирования мощности. Структурная схема регулятора скорости представлена на рисунке 9.
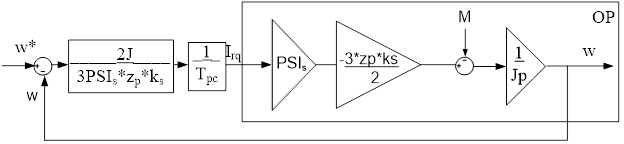
Рисунок 9 – Структурная схема регулятора скорости
Регулятор скорости представлен на рисунке 10.
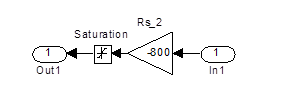
Рисунок 10 – П-регулятор скорости
Настройка П-регулятора скорости осуществляется также экспериментальным методом и выполняется при настроенном регуляторе мощности. Были определены следующие оптимальные коэффициенты:
для двигателя 4АНК280М8У3 Kp=-800 ;
для двигателя АОК2-51-4Т2 Kp=-200.
5. Моделирование
5.1 Общая модель, ее описание и принцип работы
На рисунке 11 представлена изначальная модель исследования машины двойного питания.
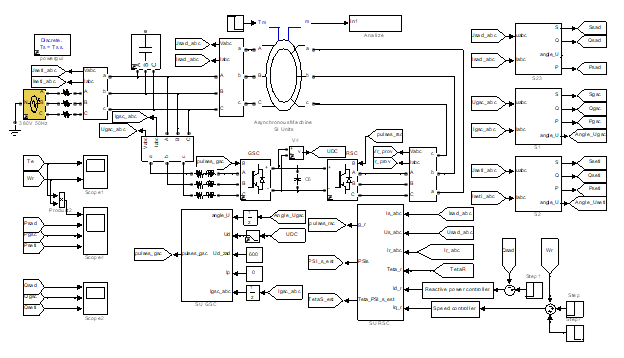
Рисунок 11 – Модель исследования машины двойного питания
Машина двойного питания (Asynchronous Machine SI Units) подключается статорной и роторной обмотками к источнику питания (сети 380V 50Hz). Статорная обмотка подключается к сети через трехфазное измерение напряжений и токов статора. Роторная обмотка подключается к роторному преобразователю (RSC) через трехфазное измерение, далее к сетевому преобразователю (GSC). Между роторным и сетевым преобразователем образуется участок постоянного тока с параллельно включенным конденсатором (C6). Также на участке постоянного тока снимается напряжение (UDC) вольтметром (V4). После сетевого преобразователя подключается RLC-блок (учитывает сопротивление и индуктивность реальных проводников), и через трехфазное измерение подключается к сети. Регулируемые величины задаются блоками Step.
Рассмотрим подробнее элементы модели [10].
На рисунке 12 представлен блок трехфазного измерения напряжения и тока. Данный элемент несколько раз используется в модели для измерения токов и напряжений сети, статорной цепи, роторной цепи до преобразователей и после.
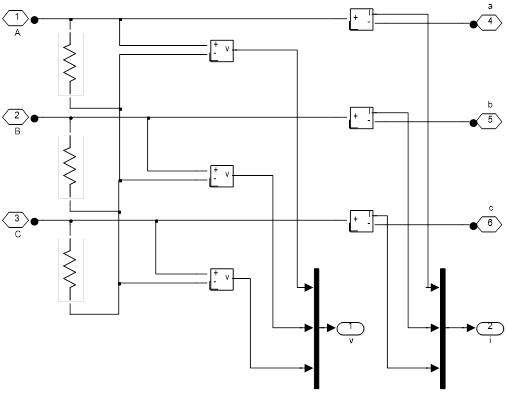
Рисунок 12 – Блок трехфазного измерения напряжений и токов
На рисунке 13 представлена подсистема «SU GSC». Данная подсистема формирует управляющий сигнал для сетевого преобразователя.

Рисунок 13 – Векторное управление сетевым преобразователем
Сетевой полупроводниковый преобразователь регулирует величину поступающей в сеть активной и реактивной мощности посредством взаимодействия с сетевой индуктивностью. Целью сетевого полупроводникового преобразователя является поддержание постоянного напряжения в звене постоянного тока независимо от величины и направления мощности ротора, отдача и потребление мощности сети. Метод векторного управления используется с системой отсчета ориентированной по положению вектора потокосцепления статора и позволяет независимо управлять активной и реактивной мощностью, протекающей между сетью и преобразователем.
На рисунке 14 представлена подсистема «SU RSC». Данная подсистема формирует управляющий сигнал для роторного полупроводникового преобразователя.
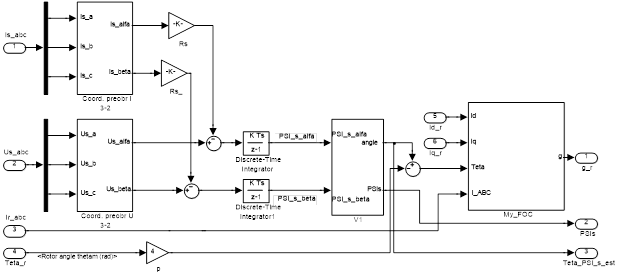
Рисунок 14 – Векторное управление роторным преобразователем
5.2 Результаты моделирования. Регулирование реактивной мощности при постоянной скорости
Результаты моделирования при начальных условиях (w*=1, Q*=20 > 50> -10кВА)
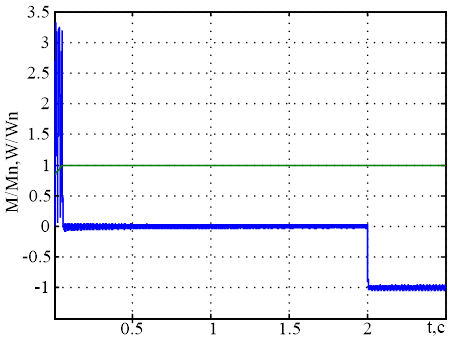
Рисунок 15 – Графики момента и скорости (w*=1, Q*=20 > 50> -10)
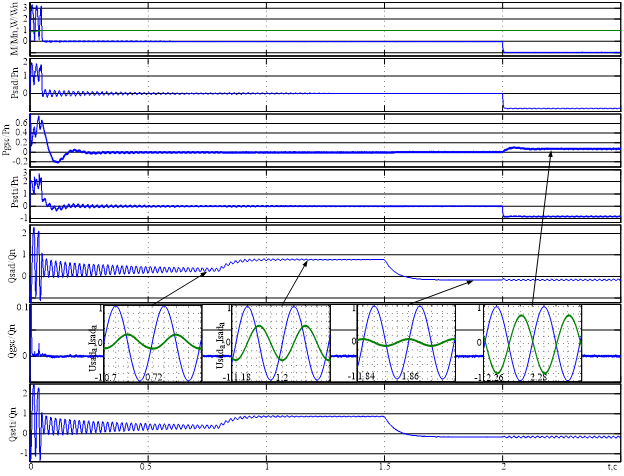
Рисунок 16 – Графики активных и реактивных мощностей, момента и скорости (w*=1, Q*=20 > 50> -10кВА)
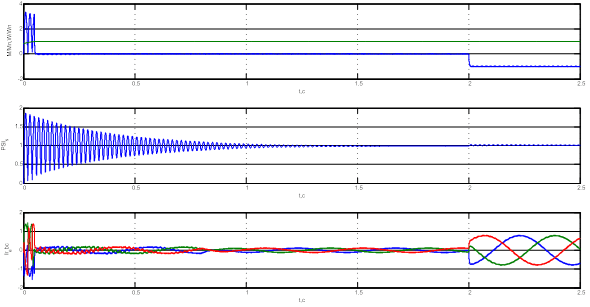
Рисунок 17 – Графики момента, скорости, потока статора и токов ротора (w*=1, Q*=20 > 50> -10кВА)
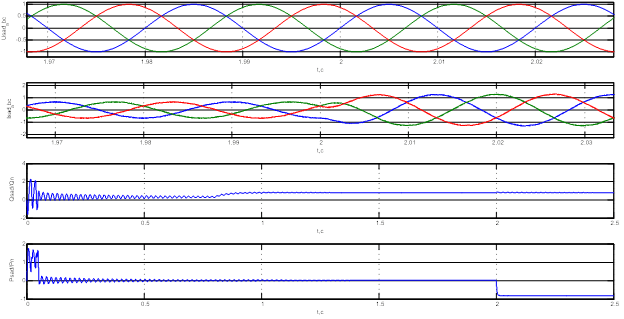
Рисунок 18 – Графики токов и напряжений статора, реактивная и активная мощности статора (w*=1, Q*=20 > 50> -10кВА)
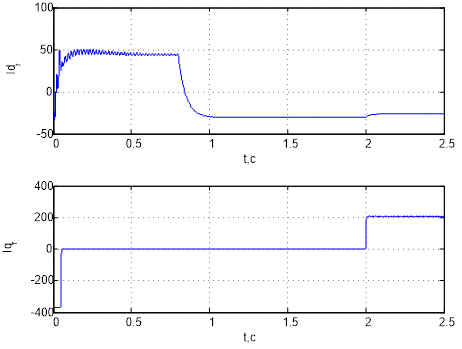
Рисунок 19 – Графики dq составляющих тока ротора
(w*=1, Q*=20 > 50 > -10кВА)
Выводы
В соответствии с целью и задачами магистерской работы проведены теоретические исследования машины двойного питания. Были описаны общие сведения о машине двойного питания (МДП) и системы координат используемые при моделировании. Также были описаны исследуемые двигатели, их характеристики и схемы замещения, приведено математическое описание асинхронного двигателя.
При разработке системы регулирования реактивной мощности и скорости было приведено описание функциональных схем систем управления и вычисление реактивной мощности. Описаны объекты регулирования реактивной мощности и скорости, а также настройка регуляторов.
На основании функциональных схем была разработана и исследована система управления электроприводом. Исследование динамических свойств системы управления электропривода в типовых режимах работы было выполнено на математической модели с помощью пакета MATLAB и его приложения SIMULINK. Приведено общее описание исследуемой модели, а также ее отдельных элементов.
Также приведены результаты моделирования в определенном режиме работы.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2017 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Стекленев А.С. Проблемы и перспективы использования альтернативных источников энергии в Российской Федерации [Электронный ресурс]. – Режим доступа: http://sntbul.bmstu.ru/doc/...
- Понкратов А.С, Мирошник Д.Н. Использование машины двойного питания в качестве генератора переменного тока [Электронный ресурс]. – Режим доступа: http://masters.donntu.ru/2015/...
- Машина двойного питания [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/...
- Dr J.Fletcher, J.Yang Introduction to Doubly-Fed Induction Generator for Wind Power Applications [Электронный ресурс]. – Режим доступа: https://www.google.com.ua/url?sa=...
- Безденежных Д.В. Разработка и исследование электропривода на базе машины двойного питания с подключением обмоток статора и ротора к преобразователям частоты/дисс. канд. техн. наук/Липецк. – 2011. – 380 с.
- Понкратов А.С. Анализ электромагнитных преобразований энергии в машинах двойного питания: магистерская работа. ДонНТУ, Донецк – 2015.
- Белей В.Ф. Реактивная мощность ветроустановки на базе асинхронного генератора/ В.Ф. Белей// Электрооборудование судов и электроэнергетика: сб. науч. тр./ КГТУ. – Калининград: Изд-во КГТУ. – 2000.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты/Р.Т. Шрейнер. – Екатеринбург.: УРО РАН, – 2000. – 654 с.
- Мещеряков В.Н., Безденежных Д.В. Способы управления асинхронным двигателем с фазным ротором по статорной и роторной цепям // Материалы региональной научно-технической конференции
Автоматизация и роботизация технологических процессов
. Воронеж: ВГТУ, 2009. - Мещеряков В.Н., Безденежных Д.В. Электропривод на базе машины двойного питания с подключением обмоток статора и ротора к преобразователю частоты // Сборник статей научно-технической конференции, посвященной 35-летию кафедры электропривода Липецкого государственного технического университета. Липецк: ЛГТУ, 2009.