Введение
В последние два десятилетия регулируемый асинхронный электропривод претерпел столь существенные изменения в своем развитии, что полностью вытеснил из многих областей синхронный привод и привод постоянного тока. Это связано прежде всего с достижениями в области силовой электроники и микропроцессорной техники, на основе которых были разработаны преобразователи частоты, обеспечивающие управление асинхронными короткозамкнутыми двигателями с энергетическими и динамическими показателями, соизмеримыми или превосходящими показатели других приводов.
Сегодня частотное управление является для асинхронного привода своего рода техническим стандартом. В то же время практически вышли из употребления и не используются в современных разработках такие способы управления и устройства как симметричное и несимметричное управление напряжением, управление введением добавочных сопротивлений в цепи статора и ротора, управление изменением числа пар полюсов и др.
Асинхронный двигатель как объект управления
Современная теория электрических машин и электропривода строится на основе представления электромагнитных величин векторами. Это позволяет не только получить компактную запись уравнений, но также построить высокоэффективные системы управления, базирующиеся на векторных понятиях
Большинство электрических машин переменного тока предназначено для работы в трехфазных сетях, поэтому они изготавливаются с симметричными трехфазными обмотками на статоре, причем МДС этих обмоток распределены в пространстве по закону близкому к синусоидальному, т.е. МДС, создаваемая k-й обмоткой в точке, отстоящей от оси этой обмотки на угол αk равна – Fk(α)= Fk0 cosαk, где Fk0 – МДС, соответствующая оси k-й обмотки.
Синусоидальность распределения позволяет представить МДС или пропорциональные им токи обобщённым пространственным вектором на плоскости, перпендикулярной оси ротора машины. В дальнейшем под обобщённым вектором мы будем понимать вектор, проекции которого на оси фазных обмоток в любой момент времени равны мгновенным значениям фазных величин, представляемых этим вектором.
Если ток в каждой обмотке представить вектором ( ia, ib, ic рис. 1), модуль которого равен мгновенному значению тока ( ia, ib, ic), а направление совпадает с осью обмотки, и сложить эти векторы, то мы получим пространственный вектор тока 1.5i

Рисунок 1 – Синтез обобщенного вектора тока i и разложение его на фазные токи
Модуль этого вектора будет в полтора раза больше модуля вектора i , проекции которого на оси фазных обмоток равны мгновенным значениям фазных токов ia , ib , ic . Следовательно, для того, чтобы вектор, полученный сложением фазных векторов, соответствовал данному выше определению, его нужно уменьшить в полтора раза, умножив на коэффициент 2/3. В общем случае m-фазной системы обмоток модуль суммарного вектора в m/2-раз больше модуля обобщённого вектора и, соответственно, коэффициент, на который нужно умножать результат суммирования равен 2/m.
Преобразователи частоты для асинхронного электропривода
Большая часть приводов переменного тока питается от промышленной трехфазной сети, поэтому силовая часть систем частотного управления обычно называется преобразователем частоты, т.к. она формирует в обмотках статора АД напряжения и токи с частотой отличной от частоты источника питания.
Преобразователи частоты (ПЧ) по числу ступеней преобразования энергии делятся на ПЧ с непосредственной связью (НПЧ) и с промежуточным звеном постоянного тока (рис. 2).
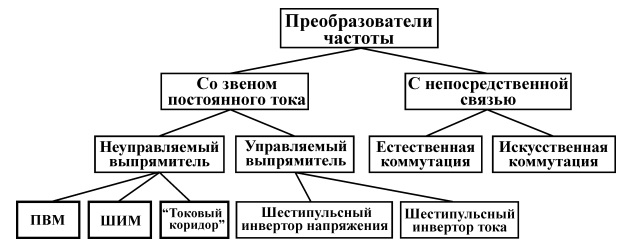
Рисунок 2 – Основные типы преобразователей
В настоящее время более распространены ПЧ со звеном постоянного тока. На входе энергетического канала этих ПЧ установлен управляемый (рис. 3а и б) или неуправляемый (рис. 3в) выпрямитель. После преобразования выпрямителем энергии переменного тока с постоянными значениями напряжения и частоты в энергию постоянного тока, она поступает на вход инвертора (И) и снова преобразуется в энергию трехфазного переменного тока, но уже с регулируемыми параметрами. Таким образом, в ПЧ этого типа происходит двойное преобразование энергии, что несколько снижает его КПД, однако другие существенные преимущества этих преобразователей обеспечивают им доминирующее положение в современном автоматизированном приводе.
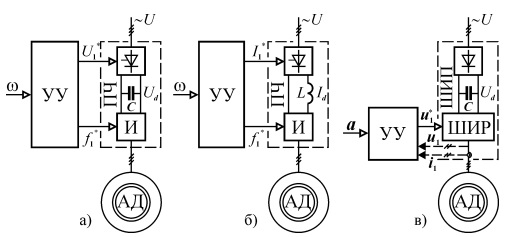
Рисунок 3 – Функциональные схемы преобразователей
Для энергетической развязки выпрямителя и инвертора между ними обязательно устанавливают накопитель энергии. В зависимости от вида этого накопителя – конденсатор или дроссель (рис. 3) – инвертор работает либо в режиме источника напряжения (ИН), либо источника тока (ИТ). Накопитель энергии необходим потому, что энергия постоянного тока чисто активная, а для формирования магнитных полей в двигателе нужен обмен реактивной энергией с источником питания, которую и обеспечивает накопитель. При переходе АД в генераторный режим изменяется знак активной составляющей тока статора, т.е. ее направление по отношению к напряжению. Этот ток и напряжение примерно соответствуют величинам на входе И, поэтому при изменении режима АД должно изменяться взаимное направление тока и напряжения в звене постоянного тока.
Список использованной литературы
- Асинхронные электроприводы с векторным управлением/В.В. Рудаков, И.М. Столяров, В.А. Дартау. – Л.: Энергоатомиздат, 1987.
- Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. – Л.: Энергоиздат, 1982.
- Булгаков А.А. Частотное управление асинхронными электродвигателями. – М.: Наука, 1966.