
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Вплив протиаварійного управління на момент турбіни
- 3. Вплив протиаварійного керування на системи виникнення синхронних генераторів
- 4. програмне забезпечення для дослідження засобів протиаварійного управління
- Висновки
- Перелік посилань
Вступ
Протиаварійне управління має вирішувати такі завдання:
- Виключення порушення стійкості паралельної роботи енергосистем;
- Ліквідація асинхронного режиму, якщо запобігти порушення стійкості не вдалося;
- Величини напруги, струми та частоти не повинні виходити за допустимі межі.
Головною і першочерговою задачею виступає перша з перерахованих вище, так як утримання стійкості в більшості випадків є головним фактором, який забезпечує вирішення і інших завдань.
Вирішити задачу забезпечення динамічної стійкості – це означає запобігти переході відносних кутів між векторами ЕДС синхронних машин за межі допустимих значень протягом всього аварійного процесу до настання нового встановленого режиму
1. Актуальність теми
Головні аспекти функціонування електроенергетичної системи ‐ надійність паралельної роботи (визначається як збиток у споживачів, який є слідством аварійного недоотпуску електроенергії протягом заданого періоду часу) і живучості (властивість енергосистеми, завдяки якій енергосистема може протистояти важким аварійним обуренням, запобігає подальшому розвитку аварій) забезпечуються, як правило, рядом таких заходів:
- Такі, при яких повинні бути резервовані генеруючі потужності та пропускні здатності ТЕП;
- Оптимізація режимів роботи енергосистем з обліком балансів гідроресурсів та паливних ресурсів;
- Раціональним розташуванням енергетичних об'єктів;
- Доробка та модифікація автоматизації диспетчерського управління;
- Підвищення рівня кваліфікації та виробничої дисципліни персоналу, що працює на енергооб'єктах та ін.

Рисунок 1 – Елементи системи протиаварійного керування
Розрізняють наступні засоби керування: комутаційного типу (включення-відключення елементів енергосистем); з зміною моменту турбін шляхом збільшення або зменшення подачі пара або води; зміною збудження синхронних генераторів і компенсаторів; зміною режиму роботи перетворювальних пристроїв в системі передачі, розподілу та споживання електроенергії. [1]
Удосконалення та підвищення якості роботи основних засобів автоматичного протиаварійного управління є запорукою правильного та безперебійного функціонування елементів ЕЕС, також не варто забувати, що необхідно розробляти та впроваджувати нові додаткові управляючі пристрої безпосереднього впливу на перехідні процеси в енергосистемах.
2. Вплив протиаварійного управління на момент турбіни
До засобів протиаварійного керування впливу на момент турбіни відносяться: імпульсне розвантаження турбін, обмеження потужності турбіни, підсилення потужності турбіни. Сила впливу на момент турбіни залежить від характеристик котлотурбінного агрегату. На рис. 3 приведена спрощена схема енергоблоку, в якому використовуються наступні скорочення назв агрегатів і пристроїв регулювання: ЦВТ – циліндри високого тиску (турбіна активного типу) ЦСТ – циліндри середнього тиску (включає корпус з вихлопними патрубками, ротором і направляючою апаратурою) ЦНТ – циліндри низького тиску турбіни; БРОУ – швидкодіюча редукціонна охолоджуюча установка; АРШ – автоматичний регулятор швидкості турбіни; ЭГП – єлектрогідравлічний перетворювач; РДП – регулятор тиску пари; СРПГ – система регулювання парогенератора (котла). Кожен енергоблок обладнаний автономною системою регулювання швидкості обертання, і безпосередньо введений в систему автоматичного регулювання частот і потужності (АРЧП). Автоматичне частотнае розвантаження (АЧР) є важливішею складовою частиною автоматики. Якщо произошло зниження частоти, воно не дозволить вийти за неприпустимі межі. Якщо при цьому в частині, яка виявилася відокремленою, не накопичений запас потужності у вигляді недогруженних агрегатів, то дуже вірогідно, що може відбутися неприпустиме зниження частоти. При цьому слід мати на увазі, що котельні агрегати повинні забезпечувати резерв потужності турбоагрегатів. Можливість і швидкість введення резерву на тепловій електростанції залежать від багатьох факторів: прийнятого способу регулювання потужності турбін, типу виконання котельного агрегату (прямого, барабанного, з природною циркуляцією, з примусовою циркуляцією), технічного стану теплового обладнання. [3]
АЧР при певному зниженні частот через виникнення дефіциту активної потужності діє на відключення частини по можливості менш відповідальних споживачів енергії. В сучасних енергосистемах найбільш поширеної причиною виникнення дефіциту потужності є аварійне відключення лінії, що зв'язує дефіцитний район з іншою частиною енергосистеми.
Як відомо, кожний енергоблок може бути включений в систему автоматичного регулювання частот і потужності (АРЧП). Автоматичне регулювання швидкості обертання турбіни не тільки забезпечує необхідну якість електроенергії, але і запобігає поширенню частоти, що є тим самим дуже важливим заходом щодо забезпечення надійності. [3]
Підвищення стійкості при зміні потужності турбіни досягається двома способами ‐ збільшенням потужності турбіни або зменшенням (розвантаженням) потужності турбіни. Розвантаження турбіни використовується для збереження статичної та динамічної стійкості паралельної роботи енергосистем і дозволяє різко прискорити ресинхронізацію станції або енергосистеми.
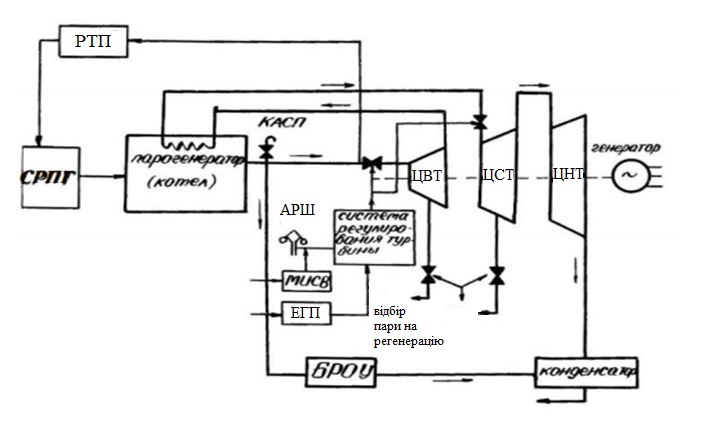
Рисунок 2 – Спрощена схема енергоблоку
У деяких ситуаціях регулювання турбін може призвести до відчутного перерозподілу потужності в післяаварійному режимі, зменшуючи вплив від відключення генераторів або відключення навантаження. Несприятливим також може виявитися вплив системи регулювання частот. Разом з тим АРЧП завдяки системі обмеження перетоків, яка на багатьох випадках запобігає порушенню стійкості при спонтанному та аварійному перевантаженнях лінії. Котельна автоматика також може надавати неблагоприятне вплив, зокрема здійснення регулювання пари напруги для підтримки постійного тиску перед турбіною. При зниженні частоти тиск пари перед турбіною починає падати, що призводить до дії регулятора, який закриває клапани і, відповідно, знижує потужність турбіни. [3]
Таким чином, через кілька хвилин виникає мимовільне розвантаження енергоблоків, що призводить до повторного зниження частот і загрожує небезпекою порушення стійкості та розвитку аварії. Регулювання енергоблоку при повністю відкритих клапанах з керуванням потужності за допомогою зміни параметрів пара практично виключає коливання частоти. В результаті суттєво зменшується регулюючий ефект генерації в енергосистемі, а рішення задачі підтримання частоти в аварійних умовах залежить від засобів протиаварійної автоматики [4]
3. Вплив протиаварійного керування на системи виникнення синхронних генераторів
Форсування збудження дається не регулятором збудження (АРЗ) і не спеціальним пристроєм форсування, а доповнює все це і забезпечується пристроями АПНС (автоматика запобігання порушення стійкості). Такий вид ФЗ потрібен тільки в тому випадку, якщо АРВ не дає форсування в тих умовах, коли вона необхідна. [1]
Автоматичні регулятори збудження сильної дії застосовуються для підвищення стійкості паралельної роботи турбоагрегатів та гідрогенераторів електростанцій, пов'язаних з енергосистемою протяжних, сильно завантажених ліній електропередачі. Ці АРВ дозволяють також компенсувати несприятливий вплив на стійкість дещо збільшених реактивних опорів нових потужних турбогенераторів з безпосереднім охолодженням обмоток. [2]
В основному використовуються безперервні системи регулювання. Ці системи, особливо регулятори збудження (АРВ) сильної дії, забезпечують значне підвищення статичної стійкості і досить правильне керування збудженням під час перехідних процесів. По принципу формування керуючого впливу,їх розділяють на дві групи. Одна з них в якості вхідних параметрів використовує відхилення напруги ΔU на шинах генератора або на збірних шинах високої напруги від заданої величини відхилення частоти Δf на зажимах генератора від вихідного значення та їх похідні. Друга група використовує відхилення струму генератора або електропередачі ΔI від початкового значення та похідні від струму. [2]
Підвищення динамічної стійкості електропередачі досягається швидким збільшенням струму збудження до максимально допустимого значення – так званим форсуванням збудження синхронного генератора. За допомогою пристроїв релейного автоматичного управління також здійснюється форсування збудження генератора. [6]
Регулювання збудження генератора з точки зору його впливу на динамічну стійкість можна розглядати якісно. На рис 1.3, в жирною лінією показані майданчики при порушенні стійкості при роботі без регулювання збудження[7]
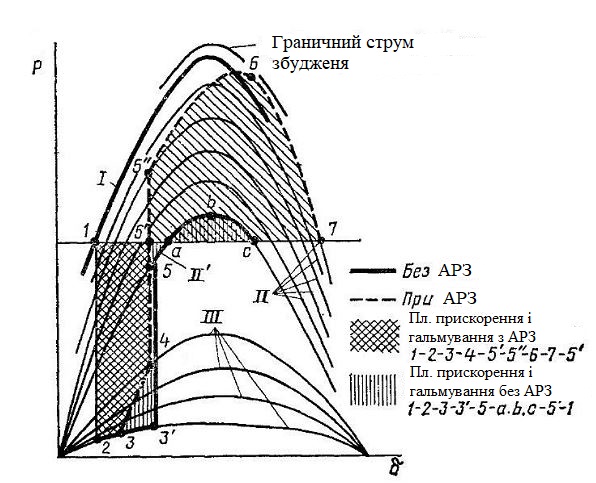
Рисунок 3 – Ефект форсування збудження (функція P=f(δ))
Форсуванняа збудження дозволяє утримувати генератор в синхронізмі в першому циклі хитань. В другому циклі хитань форсування збудження необхідно знімати. Якщо цього не зробити, то дуже вірогідно, що відбудеться порушення стійкості в другому циклі хитань [7]
Аналіз протиаварійного регулювання, яке впливає на генерацію збудження, дає можливість зробити висновок про те, що цілеспрямованість необхідно обгрунтувати на підставі попередніх досліджень залежно від конкретних умов роботи електроенергетичної системи. [8].
4. Програмне забезпечення для дослідження засобів протиаварійного керування.
Програмне забезпечення, яке розробляється в даній роботі повинно відповідати наступним вимогам:
- Програмне забезпечення (ПЗ) має давати можливість здійснити оцінку впливу на характеристики турбіни та генератора на основі розрахунків електромеханічних перехідних процесів в електроенергетичній системі.
- На основі співвідношень надлишкових кінетичних енергій, яких ротор еквівалентного генератора набуває протягом всього перехідного процесу, з використанням кутових характеристик потужності, повинна проводиться оцінка умов збереження або порушення синхронної динамічної стійкості
- Повинен бути передбачений розрахунок кутових характеристик потужності для всіх досліджуваних режимів роботи електричної системи:
- нормальний вихідний режим, коли включені всі можливі зв'язки між передавальною та прийомною частинами електроенергетичної системи;
- аварійний режим, викликаний виникненням коротких замикань на лініях електропередач;
- післяаварійний режим, що наступає після відключення всіх ліній, на яких відбулося пошкодження;
- Программне забезпечення має передбачити можливість дослідження впливу ІРТ при різних тривалостях імпульсу та різної кількості неравномірності цих імпульсів, їх своєчасності, а також можливості вивчення форсирования вибудження генератора в другому та третьому циклах хитань.
- Должен бути передбачений розрахунок коротких замикань різних видів (трифазне, двофазние, двофазние на землю та однофазние) на будь-яку відстань від керованого об'єкта (турбогенератора).
- Для оцінки умов збереження СДС в програмному забезпеченні повинно бути передбачено визначення залежностей відданих генератором активних потужностей, а також залежності зміни у часі кутових положень ротора протягом перехідного процесу.
- Розрахунок зміни рівня вильоту ротора в часі необхідно проводити на основі інтеграції диференціального рівняння руху ротора генератора числовими методами.
- Длительность розрахунку перехідного процесу повинна охоплювати 2 ‐ 3 цикли хитань роторів у перехідному режимі, так як при певних умовах можливим є порушення динамічної стійкості не в першому, а в другому або третьому циклі хитань.
- Програмне забезпечення має розроблятися з використанням пакетів програм для ПЕОМ, що дозволяють найбільш просто виконати рішення диференціальних рівнянь і наочно виконати графічні залежності кутових характеристик потужності та зміни в часі кутових положень ротора генератора.
Програмне забезпечення створено в математичному пакеті Mathcad. Він дозволяє вирішувати алгебраїчні та диференціальні рівнянь як з постійними, так і змінними параметрами, дозволяє проводити аналіз функцій, пошук їх екстремумів, числове і аналітичне диференціювання та інтегрування, виведення таблиць і графіків при аналізі наведених рішень. У пакеті є також елементи програмування. Вбудоване в пакет програмування легко освоюється і дозволяє вирішити найрізноманітніші та досить складні завдання і також є серйозним інструментом для розрахунків. Мова програмування в останні версіях MathCAD достатньо потужна і дуже елегантна. MATHCAD – універсальний математичний пакет, призначений для виконання інженерних та наукових розрахунків. Основна перевага пакета – природний та зрозумілий математичний мова, на якому формуються поставлені завдання. Об'єднання текстового редактора з можливістю використання загальноприйнятої математичної мови дозволяє користувачеві отримати готову вихідну документацію. Пакет обладнаний широкими графічними можливостями. Можливість створення анімацій дуже допомогла при написанні даної роботи. Так, при перевірці електроенергетичної системи на стійкість дуже легко визначити, при яких значеннях ця стійкість була порушена.
Висновки
Розроблене дане програмне забезпечення є програмним засобом і дозволяє дослідити вплив на момент турбіни і збудження генератора . Розроблене програмне забезпечення є програмним засобом і дозволяє досліджувати вплив впливу на момент турбіни і збудження генератора і оцінити динамічну стійкість енергосистеми. За допомогою цих програм виконано дослідження протиаварійної автоматики. Таке дослідження дозволяє виконати оцінку параметрів для налаштування пристроїв впливу на момент турбіни і форсировку збудження генераторів в різних аварійних ситуаціях при великих обуреннях у системі. Магістерська робота на даний момент ще не завершена. У цей реферат на протязі її завершення будуть внесені зміни. Орієнтовние завершення роботы: май 2018 року. Готова робота може бути отримана у автора роботи або його керівника після офіційного захисту магістерської дисертації при наявності відповідного дозволу.
Список источников
- Кощеев, Л.А. Автоматическое противоаварийное управление в электроэнергетических системах / Л.А. Кощеев. – Л.:Энергоатомиздат, 1990. – 145 с.
- Глускин, И.З. Противоаварийная автоматика в энергосистемах / И.З. Глускин, Б.И. Иофьев. – М.:
Знак
. 2009. – 568 с. - Окин, А.А Противоаварийная автоматика энергосистем / А.А. Окин. – М.: Издательство МЭИ, 1995. – 212 с.
- Совалов, С.А. Противоаварийное управление в энергосистемах / С.А. Совалов, В.А. Семенов. – М.: Энергоатомиздат, 1980. – 416 с.
- Веников, В.А. Переходные электромеханические процессы в электрических системах / В.А. Веников. – М.: ВШ, 1985. – 536 с.
- Овчаренко, Н.И. Автоматика энергосистем: учебник для вузов.– 3-е изд., исправленное / Н.И. Овчаренко; под ред. чл.-корр. РАН, докт. техн. наук, проф. А.Ф. Дьякова.– М.: Издательский дом МЭИ, 2009. – 476 с.
- Куликов, Ю.А. Переходные процессы в электрических системах: Учеб. пособие / Ю.А. Куликов. – Новосибирск: НГТУ, М.: Издательство
Омега-Л
, 2013. – 384 с. - Колесник, Г.П. Переходные электромеханические процессы в электроэнергетических системах : учеб. пособие / Г. П. Колесник ; Владим. гос. ун-т. – Владимир : Изд-во Владим. гос. ун-та, 2008. – 116 с.