Аннотация
Д. Л. Вишневский – Цифровой регулятор напряжения асинхронного генератора. Разработан цифровой регулятор напряжения асинхронного генератора с конденсаторным возбуждением на базе контроллера типа Atmega8. Применение такого регулятора при проектировании судо-вых асинхронных генераторных комплексов позволит решить проблему оптимизации закона управления и измерения напряжения асинхронного генератора.
Введение
Основным источником электрической энергии переменного тока на судне до настоящего времени остается синхронный генератор (СГ). Управление напряжением СГ осуществляется по обмотке возбуждения его ротора. Простейший СГ содержит контактные кольца для подведения энергии к ротору, что затрудняет их обслуживание, поэтому современные судовые СГ выполняются в бесконтактном исполнении, что значительно усложняет конструкцию генератора, увеличивает его массу и стоимость. Реальной альтернативой СГ является асинхронный генератор (АГ) с короткозамкнутым ротором. Сложность применения АГ заключается в необходимости иметь управляемый источник реактивной мощности для возбуждения и регулирования напряжения. Прогресс в конденсаторостроении и тиристорной технике в последнее время существенно снизили стоимость и массу управляемых источников реактивной мощности. Сегодня их массогабаритные показатели в 10 – 20 раз меньше, чем у электрических машин. В результате бесконтактный АГ оказывается дешевле, легче и проще синхронного. До настоящего времени полностью не решены все проблемы управления реактивным источником для регулирования напряжения АГ. К таким проблемам относятся измерение напряжения, синхронизация, подключение конденсаторов с помощью тиристорных ключей и оптимизация закона управления.
Цель статьи – разработка цифрового регулятора с конденсаторным возбуждением на базе простого контроллера типа Atmega8 с целью решить проблему управления и измерения напряжения асинхронного генератора. При возбуждении АГ устанавливается напряжение, которое определяется точкой пересечения вольт-амперных характеристик генератора и конденсаторов. Управление напряжением АГ осуществляется за счет изменения величины емкостного тока. На судах существует два способа генерирования реактивного тока: с помощью синхронного компенсатора или секций конденсаторных батарей [7, 8]. В настоящее время использование полипропиленовых конденсаторов предпочтительнее. При разработке цифрового регулятора учтены требования к статическим и динамическим характеристикам судовой системы стабилизации напряжения, относящейся к классу автоматизации G2 [1]. В разрабатываемой цифровой системе стабилизации напряжения (рис. 1) используется пять трехфазных секций конденсаторов, четыре из которых коммутируются при помощи тиристорных ключей. Подключение секции управляется четырехразрядным двоичным числом, поэтому величины коммутируемых емкостей соотносятся как (1:2:4:8). Для получения характеристик АГ как объекта управления использованы экспериментальные и теоретические исследования [4 – 6].
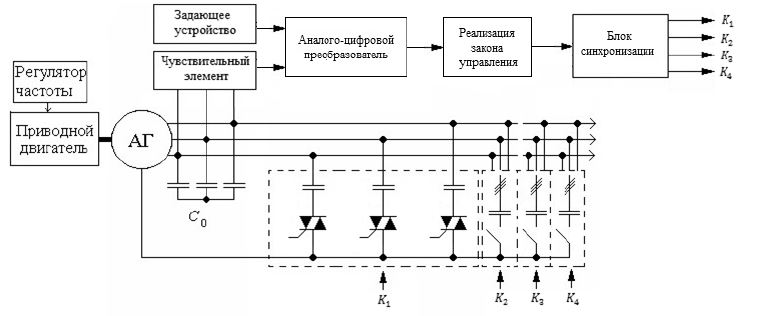
Рисунок 1 – Функциональная схема судового асинхронного генераторного комплекса
Передаточная функция АГ представлена как параллельное соединение инерционного и безынерционных звеньев.
Эти свойства генератора использованы для реализации регулятора напряжения. При скачке нагрузки возникает мгновенный провал напряжения, который использован для определения необходимого управляющего воздействия цифрового регулятора в течение первого периода переменного напряжения (за 20 мс).
В работе на контроллере АTMEGA8 реализовано измерение модуля вектора напряжения двумя способами: в первом случае рассчитывается среднее значения модуля вектора трехфазного напряжения, а во втором случае определяется амплитуда напряжения только в момент его максимума.
Цикл расчета напряжения первым способом выполняется долго – за 7 миллисекунд, что делает расчет среднего значения некорректным.
Реализация второго способа измерения по одной фазе значительно проще и предполагает запоминание максимума переменного напряжения на период коммутации конденсаторов (рис. 2). Это значение используется в качестве регулирующей величины.Схема моделирования показана на рис. 3.
Проведенные исследования показали, что для управления напряжением АГ целесообразно использовать дискретный интегральный закон управления, который получен путем дискретизации по уровню линейноимпульсного закона регулирования напряжения.
Реализация интегрального закона выполнена по рекуррентной зависимости:

где ΔUn=U3–Un – разница заданного и измеренного максимумов напряжения в процентах; Un – максимум напряжения на текущем шаге; U3 – заданный максимум напряжения; суммарная емкость на предыдущем периоде напряжения; Cn-1 – суммарная емкость на текущем периоде напряжения; k – коэффициент, определяющий скорость интегрирования (суммирования) отклонения ΔUn.
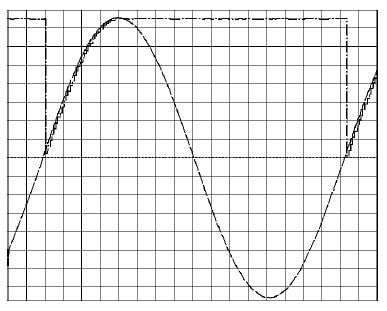
Рисунок 2 – Определение амплитудного значения напряжения фазы α асинхронного генератора
Реализация линейно-импульсного закона в конденсаторной установке с четырьмя секциями конденсаторов выполнена путем его преобразования в четырехразрядный цифровой закон управления. Это преобразование показано на рис. 4. Для исследования переходных процессов и выбора настроечных параметров регулятора используется программа на языке РASCAL [9,10], в которой реализована математическая модель асинхронного генераторного комплекса [2, 3].
Выполнено моделирование включения активно-индуктивной нагрузки на АГ и исследование переходных процессов в САР напряжения АГ при варьировании величины зоны нечувствительности Δ и постоянном коэффициенте усиления k = 1. Величина зоны нечувствительности в 3 % не обеспечивает установившееся отклонение напряжения в 2,5 %, а зона нечувствительности в 1 % приводит к модуляции напряжения, поэтому выбрана зона нечувствительности Δ = ± 2 %.
При фиксированном значении Δ = ± 2 % исследованы переходные процессы в САР при варьировании коэффициента усиления k от 1/3 до 2.
На основании обработки приведенных переходных процессов получена и проанализирована диаграмма качества переходных процессов: зависимость времени переходного процесса tn и перерегулирования σ от коэффициента усиления k интегрального регулятора.
Исходя из проведенных исследований, определены следующие настроечные параметры:
- зона нечувствительности – 2 %;
- коэффициент усиления k = 1;
- при этом переходное отклонение напряжения при скачке и сбросе нагрузки δUдин = 14 %;
- время переходного процесса tn = 0,03 c;
- перерегулирование σ = 0.
Переходной процесс в САР при выбранных параметрах настройки регулятора показан на рис.5.
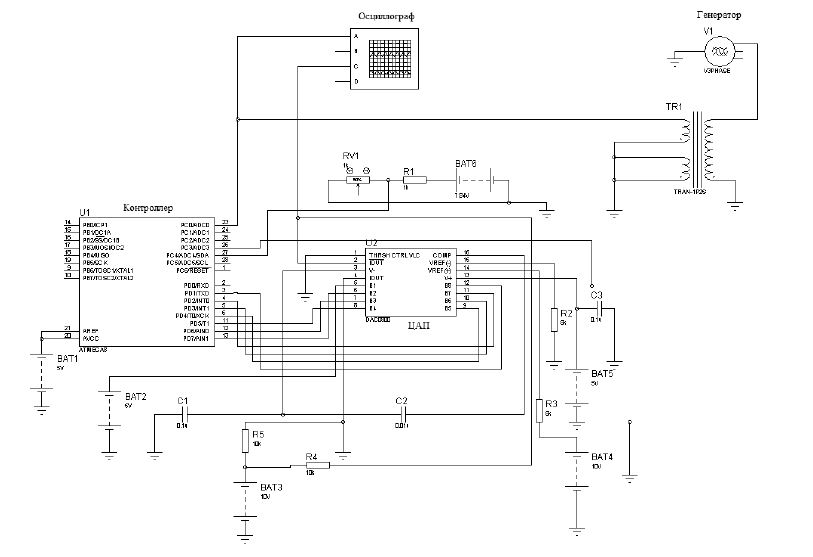
Рисунок 3 – Схема моделирования измерения амплитудного значения напряжения фазы α асинхронного генератора
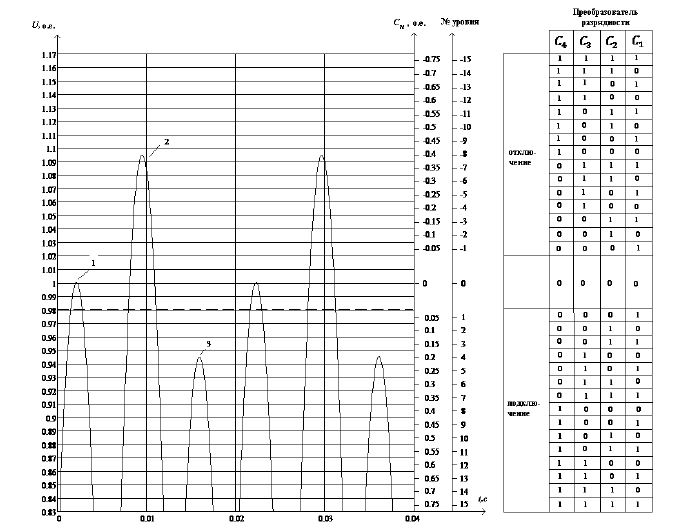
Рисунок 4 – Преобразование линейно-импульсного закона в четырехразрядный цифровой закон управления
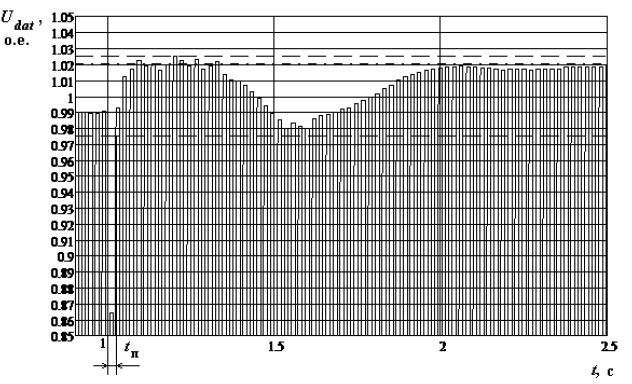
Рисунок 5 – Переходный процесс в САР при k = 1, Δ = ± 2 %
Выводы
Технические возможности контроллера Atmega8 по скорости аналого-цифрового преобразования и вычисления арифметических функций не позволяют в течение одного периода переменного тока выполнить вычисление среднего значения напряжения при одновременной синхронизации включения конденсаторов. Для обеспечения работы регулятора в реальном масштабе времени в качестве регулируемого параметра выбран максимум напряжения, что позволило упростить алгоритм управления. Разработана программа измерения напряжения и реализации четырехразрядного цифрового интегрального закона управления конденсаторами возбуждения асинхронного генератора на контроллере Atmega8. Выполненное моделирование процессов управления напряжением асинхронного генератора с разработанным регулятором позволило определить настройки цифрового регулятора, что значительно превосходит требования, установленные стандартом ISO 8528–1:2005.
Список использованной литературы
1. ISO 8528–1:2005. Агрегаты генераторные переменного тока с приводом от поршневых двигателей внутреннего сгорания.
2. Важнов Д. И. Переходные процессы в машинах переменного тока / Д. И. Важнов. – Л. : Энергия, 1980. – 256 с.
3. Вишневский Л. В. Универсальная математическая модель генератора переменного тока / Л. В. Вишневский, В. П. Мироненко // Изв. ВУЗ Электромеханика. – 1986. – № 3. – С. 33 – 40.
4. Дао Минь Куан. Совершенствование режимов работы судового асинхронного дизель-генератора / Дао Минь Куан: дис. канд. техн. наук : 05.05.03.–Одесса, 2011. – 153 c.
5. Кицис С. И. Исследование регулировочных свойств асинхронного генератора / С. И. Кицис // Электричество. – 1980. – № 2. – С. 36 – 41.
6. Кицис С. И. К исследованию процессов установления при самовозбуждении асинхронных машин / С. И. Кицис // Изв. АН СССР Энергетика и транспорт–1971.–№ 4. – С. 147 – 153.
7. Новиков А. В. Емкостное самовозбуждение асинхронного генератора / А. В. Новиков, С. Г. Кюрегян // Известия ВУЗ Электромеханика.– 1967. –№2. – С. 173 – 179.
8. Паластин Л. М.Синхронные машины автономных источников питания / Л. М. Паластин. – М. : Энергия, 1980. – 384 с.
9. Пасс А.Е. Исследование динамики асинхронного самовозбуждающегося генератора вблизи установившегося состояния / А. Е. Пасс, Л. В. Вишневский // Изв. ВУЗ Электромеханика, 1980. – № 6. – С. 591 – 596.
10. Пасс А. Е. Расчет коэффициентов передачи асинхронного самовозбуждающегося генератора / А. Е. Пасс, Л. В. Вишневский // Электромашиностроение и электрооборудование. – К. : Техника. – 1981. – Вып.33. – С. 84 – 89.