Аннотация
William Goetzler, Timothy Sutherland, Callie Reis Двигатель с изменяемым магнитным сопротивлением. В статье обосновано использование двигателей с изменяемым магнитным сопротивлением как замены асинхронных двигателей и двигателей с постоянными магнитами.
Механически коммутируемая версия двигателя с изменяемым магнитным сопротивлением(SRM) выпускалась как на постоянном, так и на переменном токе. Однако, проблемы, связанные с управлением, шумом и пульсация крутящего момента сделали двигатель непригодным для многих применений, особенно тех, где
важна тихая работа.С достижениями в частотно-регулируемых приводах (как описано в разделе
2.4), обработки цифрового сигнала и других программных решений для управления, SRM снова
становится жизнеспособной альтернативой другим типам двигателей с максимальной эффективностью, сравнимой с ECM,
до 90% для интегральных устройств (Teschler, 2008). Интерес к СРМ также увеличился
поскольку эти двигатели не полагаются на постоянные магниты и, следовательно, не содержат редкоземельных металлов.
Статор в двигателе с переключаемым сопротивлением сконфигурирован как двигатель с постоянным магнитом и
имеет медные обмотки, составляющие магнитные полюса. Ротор состоит из стальных ламелей с
обмотками или постоянными магнитами, как показано на рисунке 2.7. Слои ротора разрезают таким образом
, чтобы стальные выступы действовали как магнитные полюса; эта конфигурация использует концепцию
«Магнитное сопротивление», в котором магнитный поток будет следовать по пути наименьшего магнитного сопротивления
в присутствии магнитного поля.Когда обмотки статора находятся под напряжением, магнитные
сопротивления ротора в этой геометрической конфигурации приводят к силе, которая выравнивает полюса ротора с полюсами статора. Обмотки статора включаются последовательно для поддержания вращения
ротора посредством переключающего действия, обеспечиваемого VFD. Как двигатели с постоянными магнитами,
требуется обратная связь для выполнения операций переключения статора с периодом вращения ротора. Для поддержания
вращения, количество полюсов в статоре и число полюсов в роторе должны быть разными.
Как правило, количество полюсов в статоре выше, чем у ротора. Это несоответствие обеспечивает
SRM пусковой крутящий момент, эквивалентный его рабочему крутящему моменту (Jin-Woo Ahn,
2011).
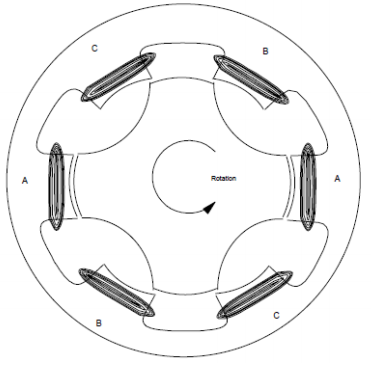
Рисунок 2.7 – Двигатель с изменяемым магнитным сопротивлением
Благодаря простому дизайну и использованию легкодоступных материалов, SRM могут быть проще
чем асинхронные двигатели переменного тока или двигатели с постоянными магнитами. Это также означает, что
производственные процессы и оборудование, которые уже существуют, могут быть использованы для увеличения
производства SRM до такого масштаба, чтобы СРМ могли стать конкурентоспособными с классическими двигателями. Кроме того, SRM могут быть сделаны меньше и компактнее, чем двигатели переменного тока. Прочность SRM делает их идеальными для высокотемпературных применений, где
роторы с постоянными магнитами подвергаются риску размагничивания (Wai-Chuen Gan, 2008).
Исторически сложилось так, что зависимость от магнитного сопротивления ротора привела к нелинейному использованию двигателя
предотвратив применения коммерчески доступных VFD для использования с SRM
без изменений. Отсутствие совместимости с коммерческими VFD является одним из основных факторов, препятствующих широкому внедрению SRM (Wai-Chuen Gan, 2008). Разнообразные
компании и исследователи предложили решения этой проблемы, а также снижение стоимости
элементов управления, что также будет дополнять доступность VFD, адаптированную к SRM. Другие факторы, способствующие
непопулярности SRM включает:
- Высокая степень пульсации крутящего момента;
- Акустический шум и вибрация, вызванные алгоритмом переключения;
- Геометрия ротора.
Традиционно SRM использовались в транспортной отрасли, потому что на высоких скоростях двигатели
удерживают крутящий момент дольше, чем двигатели с постоянными магнитами. На высоких скоростях двигатели с постоянными магнитами
должны реализовать ослабление поля, чтобы предотвратить обратную ЭДС от вмешательства в мощность двигателя
(Teschler, 2008). Для электромобилей SRM могут действовать как генераторы, так что замедление вращения
увеличивает запасенную энергию в магнитном поле, которая затем может быть использована для подачи другой нагрузки.
В настоящее время производители изучают SRM для использования в бытовых приборах. SRM и системы привода
были применены к пылесосам, стиральным машинам и лабораторным центрифугам. Один
производитель производит промышленные SRM для компрессоров и высокоскоростных насосов, а также
низкоскоростные решения с высоким крутящим моментом, такие как конвейеры и экструдеры (Bartos, 2010). Для решения
проблемы акустического шума и пульсации крутящего момента, компании и университеты, специализирующиеся на пусках, выразили
интерес к технологии с большим числом роторных полюсов. Это уменьшает угловое перемещение ротора на возбуждение и
решает проблемы, связанные с пульсацией крутящего момента (HEVT, LLC, 2013).
Список использованной литературы
- Arthur D. Little, Inc. (ADL). 1999.
Opportunities for Energy Savings in the Residential and Commercial Sectors with High–Efficiency Electric Motors.
December 1, 1999. - Novak, Peter. 2009.
The Basics of Variable-Frequency Drives.
Electrical Construction & Maintenance (EC&M). May 1, 2009. Retrieved from http://ecmweb.com... - Wu, Y – F. et al. 2012.
High-Frequency, GaN Diode–Free Motor Drive Inverter with Pure Sine Wave Output.
Power Transmission Engineering. 40 – 43. October 2012. Retrieved from https://powertransmission.com.... - Neudeck, Philip G. et al. 2002.
High-Temperature Electronics – A Role for Wide Bandgap Semiconductors?
Proceedings of the IEEE Vol. 90, No. 6, 1065 – 1076. June 2002. - Compound Semiconductor. 2012.
SiC and GaN Electronics: Where, When and How Big?
July 27, 2012. Retrieved from http://www.compoundsemiconductor.net.... - Palmour, John W. 2006.
Energy Efficient Wide Bandgap Devices.
IEEE 2006. Retrieved from: http://www.cree.com....