
Рисунок 1 – Принципиальная схема АИН
Автор:Кострубина К.А., магистрант; Шумяцкий В.М., доцент, к.т.н.
Источник:Электронный архив Донецкого национального технического университета
Точность воспроизведения задающего воздействия на нагрузке инверторами с ШИМ зависит от ряда факторов. Наибольшее влияние оказывает наличие пауз между интервалами управляемой проводимости, т.н. "мертвое время". Анализу влияния "мертвого времени" при создании модели автономного инвертора посвящена данная работа.
Автономные инверторы – устройства, преобразующие постоянный ток в переменный с неизменной или регулируемой частотой и работающие на автономную (не связанную с сетью переменного тока) нагрузку. Основой автономного инвертора является вентильное переключающее устройство.
Рассмотрим работу АИН (рис.1) пошагово. Разобьем работу схемы на 4 этапа: 1) подключение нагрузки к сети через группу тиристоров направления «вперед»; 2) закрытие группы тиристоров «вперед» и отдача реактивной энергии, накопленной в нагрузке, в сеть; 3) подключение нагрузки к сети через группу тиристоров направления «обратно»; 4) этот этап дублирует этап 2, только направление «обратно».
Рисунок 1 – Принципиальная схема АИН
Этап 1: открыты тиристоры VT1, VT4 – организована цепочка для прохождения тока через нагрузку – VT1, Zн, VT4. Этап 2: тиристоры VT1, VT4 закрыты, так как нагрузка, обычно, активно-индуктивная – ток, при снятии питающего напряжения не может моментально снизиться до нуля, поэтому происходит рекуперация энергии в сеть через диоды VD2, VD3. Этап 3: открываются тиристоры VT2, VT3. организовывается следующая токовая цепь – VT2, Zн, VT3. Как говорилось выше, на этом этапе начинает работать группа тиристоров, обеспечивающих протекание тока в обратном направлении. Этап 4: тиристоры обратного направления закрыты и происходит рекуперация запасенной энергии в сеть по следующей цепочке – VD4, Zн, VD1.
Принцип широтно-импульсной модуляции (ШИМ) рассмотрим на примере широтно- импульсного модулятора напряжения, на основе автономного инвертора напряжения (АИН).
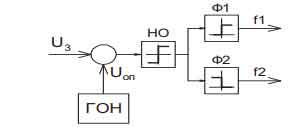
Рисунок 2 – Система управления при реализации ШИМ
Как функциональный элемент широтно-импульсный модулятор напряжения преобразует непрерывный входной управляющий сигнал Uз в высокочастотную периодическую последовательность импульсов выходного напряжения. При изменении величины задающего сигнала пропорциональное изменение среднего значения выходного сигнала обеспечивается изменением ширины импульсов, то есть путем широтно-импульсной модуляции. Точность воспроизведения задающих воздействий на зажимах нагрузки реальными устройствами на базе инверторов с ШИМ зависит от ряда факторов, к числу которых относятся изменения напряжения источника питания, падения напряжения на силовых ключах, а также наличие пауз между интервалами управляемой проводимости ключей в каждой из фаз инвертора. Введение таких пауз, образующих так называемое «мертвое время», необходимо для исключения коротких замыканий источника питания через фазы инвертора, при коммутации его ключей. Модели АИН и системы управления тиристорами, построенные в приложении Simulink пакета Matlab, представлены ниже (рис.3).
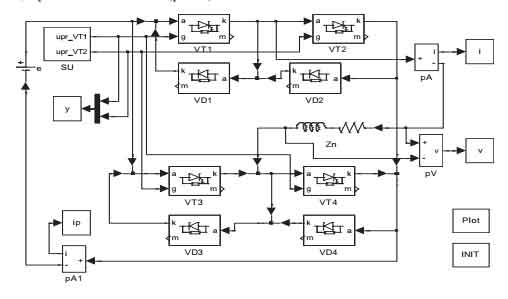
Рисунок 3 – Модель АИН с RL нагрузкой
Модель системы управления реализует учет «мертвого времени», в модели системы управления с запирающимися тиристорами (SU) добавлены элементы задержки переднего фронта сигналов управления f1(t) и f2(t) ключами модулятора (включающих сигналов) относительно моментов переключения задающей ШИМ-функции (рис.4).
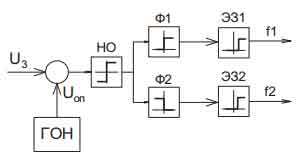
Рисунок 4 – Функциональная схема системы управления, реализующей учет мертвого времени
Система управления тиристорами реализует ШИМ модуляцию. Задающим сигналом является синусоида с частотой задания и амплитудой в относительных единицах. Задающий сигнал сравнивается с сигналом развертки, реализуемого при помощи арккосинусоидальной функции:
U разв =-2 ×arccos(sin(s×wt -p/))2/ p,
где km коэффициент, являющийся по сути заданием по амплитуде и представляет собой отношение значений напряжения задания и номинального (принятого за номинальное либо используется значение напряжения питания), s – отношение частоты коммутации к выходной частоте. Ниже приведены диаграммы, иллюстрирующие работу системы управления.
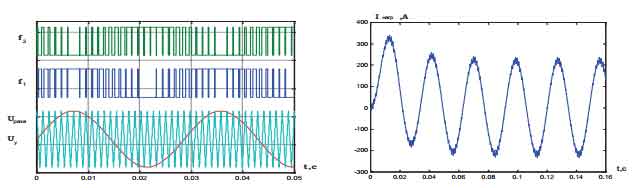
Рисунок 5 – Временные диаграммы работы системы
На приведенной диаграмме видно, что ток по форме близок к синусоиде задания. Качество тока нагрузки можно улучшить увеличением частоты коммутации (s), однако увеличение частоты коммутации приводит к увеличению пульсаций напряжения на нагрузке.Не вдаваясь в математические зависимости, отметим, что при малых значениях задающего воздействия погрешность возрастает до ±40%. В электроприводах переменного тока это приводит к существенному искажению полезной составляющей выходного напряжения и тока нагрузки преобразователя частоты в зоне малых частот и напряжений. Дальнейшие работы в этой области предполагают разработку модели, осуществляющей еще более точную отработку задающего сигнала, за счет компенсации влияния «мертвого» времени, путем введения ОС по току (рис 6).
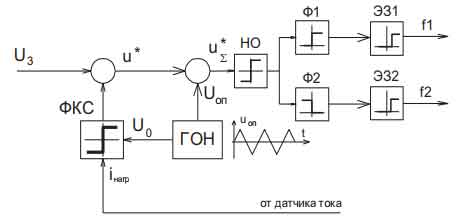
Рисунок 6 – Функциональная схема системы управления системы АИН с ШИМ с компенсацией мертвого времени
Итак, разработанная модель позволяет исследовать переходные процессы в системе АИН, и использовать полученные результаты для моделирования автономного инвертора в составе двухзвенного матричного преобразователя частоты.