Исследование влияния эффекта длинного кабеля в электроприводах с ШИМ
Автор: М.Ю. Пахомов, П.И. Розкаряка
Источник: II Международная научно-практическая конференция Инновационные перспективы Донбасса, ДонНТУ, 2016 г. – с. 248 – 254.
Аннотация
В статье рассматриваются волновые процессы, возникающие в системе частотно – регулируемом электроприводе, питающемся от длинного кабеля, приведены основные формулы для расчета, а также проанализированы возможные способы борьбы, позволяющее устранить негативное влияние волновых процессов.
В настоящее время частотно-регулируемый асинхронный электропривод получил широкое распространение в различных отраслях промышленности и его высокая эффективность использования ни у кого уже сомнения не вызывает. На сегодняшний день преобразователи частоты выполняются с использованием современных силовых полупроводниковых приборов (IGBT-транзисторов). Одной из отличительных характеристик современных силовых полупроводниковых приборов является их быстродействие по сравнению с используемыми ранее. Время переключения различных полупроводниковых приборов составляет [1]:
- однооперационные тиристоры SCR – 4 ...10 мкс;
- запираемые тиристоры GTO – 2...4 мкс;
- силовые биполярные тиристоры GTR – 0,5...2 мкс;
- транзисторы IGBT – 0,05...0,1 мкс.
Такое снижение времени переключения полупроводниковых элементов позволило выполнять преобразователи частоты на базе автономных инверторов напряжения (АИН) с широтно-импульсной модуляцией на высокой частоте коммутации ключевых приборов (от нескольких килогерц до нескольких сотен килогерц). Применение широтно-импульсной модуляции с высокой частотой коммутации силовых полупроводников позволяет снизить размеры преобразователя и увеличить его КПД [4]. Однако преимущества данной технологии сочетаются с рядом проблем, одной из которых является проблема «длинного кабеля» соединяющего преобразователь частоты (ПЧ) с электрическим двигателем (АД).
Целью данной работы является исследование проблем возникающих в системе преобразователь частоты – соединительный кабель - электрический двигатель, а также анализ возможных путей их решения.
При применении современных преобразователей частоты в сочетании с длинным кабелем, на клеммах двигателя образуются двукратные перенапряжения (в сравнении с выходным напряжением преобразователя частоты). Перенапряжения ухудшают условия изоляции обмоток двигателя. Подобные скачки напряжения могут сократить срок службы электродвигателя до нескольких месяцев [4]. Для того, что бы разобраться, почему это происходит, необходимо понимание такого физического явления как явление отраженной волны.
Инвертор напряжения с использованием технологии ШИМ не формирует синусоидальное напряжение, а генерируют непрерывную последовательность импульсов следующих с высокой частотой как на рис. 1 [1]. Импульсы напряжения передаются к зажимам двигателя по кабелю.
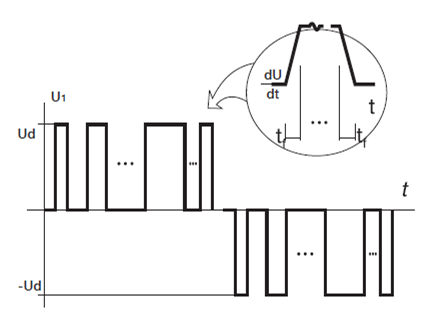
Рисунок 1 – Выходное напряжение АИН с ШИМ
Пиковое напряжение импульса на выходе инвертора равно величине напряжения в контуре постоянного напряжения преобразователя частоты (Ud). Крутизна tf фронтов импульсов напряжения определяется скоростью переключения силовых ключей АИН. Прохождение импульсного сигнала с крутым фронтом вызывает волновые процессы в кабеле, приводящие к появлению перенапряжений на зажимах двигателя.
Проблема заключается в том, что если рассматривать кабель согласно теории цепей [1] как однородную длинную линию с распределенными параметрами, элементарный участок которой показан на рис. 2, то кабель представляет собой не просто два (или 4) провода, а распределенные по его длине индуктивности и емкости. Это связано с тем, что любой проводник ненулевой длины представляет собой индуктивность, способную накапливать энергию магнитного поля и сопротивляться быстрым изменениям тока, а любые два проводника, разделенные изолятором- емкость, способную накапливать заряды и сопротивляться быстрым изменениям напряжения [5, 6].
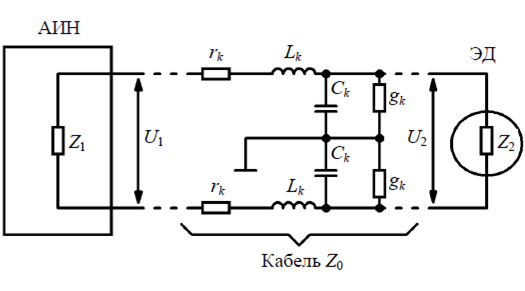
Рисунок 2 – Цепь соединения АИН с ЭД (эквивалентная схема элементарного участка кабеля)
Возникает неравенство волнового сопротивления кабеля Z0 и сопротивления АД Z2, являющегося нагрузкой кабеля. Обычно Z2 > Z0, что приводит к возникновению отраженных волн напряжения. Встречаясь со следующей падающей волной, отраженная векторно складывается с ней. Если фазы совпадают, то волны усиливают друг друга, вызывая перенапряжения рис. 3 [1], способные привести к пробою изоляции АД [2].
Исходя из [3] на зажимах АД вследствие сложения падающей и отраженной волны возникает напряжение:

где: UАД - напряжение на зажимах мотора; UАД – напряжение в контуре постоянного напряжения АИН; Г – коэффициент отражения.

Волновое сопротивление Z0 кабеля определяется последовательной индуктивностью Lк и параллельной ёмкостью Cк участка линии, последовательным активным сопротивлением rк и параллельной активной проводимостью gк можно пренебречь [1]:

где: Z2 – волновое сопротивление двигателя; Z0 – волновое сопротивление кабеля; Lk – индуктивность кабельной линии; Ck – емкость кабельной линии.
Значения параметров Lк и Cк зависят от типа, конструкции и сечения кабеля. Коэффициент отражения может принимать значения 0 < Г < 1.
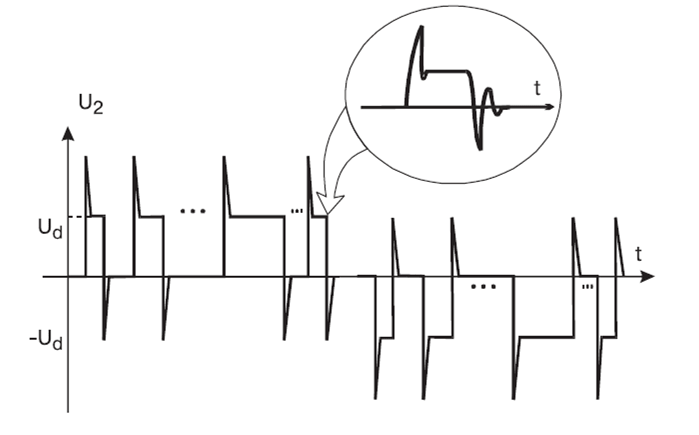
Рисунок 3 – Напряжение на зажимах АД при подключении длинным кабелем
В пределе при Z2 → ∞ (линия разомкнута на конце) имеем Г0 = 1, т.е. UАД = 2UАИН. Это режим стоячих волн [2].
Рассогласование волнового сопротивления кабеля и волнового сопротивления двигателя, прежде всего, влияет на величину перенапряжения на зажимах двигателя. Время нарастания импульса напряжения на выходе инвертора определяет критическую длину кабеля lкр, при которой теоретически можно рассчитать величину импульса напряжения по (1). Если длина кабеля L < lкр, то соответственно UАД меньше чем рассчитанное по (1). При длине кабеля L > lкр импульсы перенапряжения могут быть больше, чем рассчитанные по (1) [3]. Это связано с тем, что при высокой частоте ШИМ отраженная волна не успевает затухнуть до нулевого значения к моменту подхода следующей падающей, поэтому могут существовать условия комплексного взаимодействия нескольких падающих и отраженных волн, при которых возможно UАД ≤ 3UАИН.
Факторами, влияющими на величину отраженной волны, являются [2]: волновое сопротивление кабеля и двигателя; нагрузка двигателя; длина кабеля; величина импульса напряжения на выходе инвертора; время нарастания импульса напряжения инвертора; частота импульсов ШИМ. Причем, при L > lкр первостепенное значение играет частота следования импульсов напряжения, а не длительность фронта импульса.
Возможны четыре способа борьбы с перенапряжениями вызванными явлением отраженной волны [3]:
- изменение линейного напряжения инвертора с 400 В на 240 В;
- использование специальных двигателей предназначенных для питания от ПЧ;
- сокращение (если это возможно) длины соединительного кабеля;
- ограничение амплитуды напряжения и времени его нарастания на зажимах двигателя с помощью выходных дросселей или фильтров.
- Выбор линейного напряжения.
Как было исследовано в [3] волновое сопротивление двигателей малой мощности велико, их изоляция более всего подвержена отрицательному воздействию эффекта отраженной волны. Этот эффект усугубляется тем, что у ПЧ малой мощности частота ШИМ максимальная (например для ПЧ VF-PS1, Toshiba: 0,75-15 кВт – 12 кГц; 18,5-75 кВт – 4,0 кГц; 90-630 кВт – 2,5 кГц), и поэтому, количество импульсов перенапряжения в единицу времени также максимально. Исходя из этого, снизив входное линейное напряжение до 240 В в трехфазных моделях ПЧ напряжение в контуре постоянного напряжения UАИН = 325 В, и, следовательно, при UАД = 2UАИН импульс перенапряжения составит 650 В. А значит, при данном решении можно использовать общепромышленные двигатели. Но это решение требует дополнительных затрат. Эффективным способом снижения напряжения в звене постоянного напряжения UАИН является использование однофазных, по входному напряжению, инверторов. Напряжение UАИН для однофазных инверторов составляет 216 В, соответственно 2UАИН будет равняться 432 В.
- Выбор двигателя предназначенного для работы с преобразователем частоты.
У частотных преобразователей с напряжением питания 400 В напряжение UАИН = 540 В, следовательно, импульсы перенапряжения могут достигать примерно 1100 В напряжение импульса у специальных двигателей ограничено значением 1600 В (NEMAMG1 part 31) [3]. Поэтому при использовании специального двигателя длина кабеля теоретически неограниченна, при условии, что UАД ≤ 3UАИН. При проектировании систем управления необходимо учитывать то, что стоимость специальных двигателей существенно выше чем общепромышленных, поэтому их использование должно быть экономически обосновано.
- Сокращение длины кабеля между двигателем и ПЧ.
Сокращение длины кабеля является эффективным методом защиты двигателя. Если это возможно, то установка оборудования должна быть спроектирована таким образом, чтобы длина соединительного кабеля между АД и ПЧ была минимальной. С развитием полупроводниковых приборов применяемых в современной преобразовательной техники это решение становиться трудно реализуемым.
- Установка дополнительного оборудования.
Основная масса ПЧ устанавливаются с целью энергосбережения на двигатели общепромышленного назначения, которые работают на производствах десятки лет. Расстояния от преобразователя частоты до двигателя часто бывает более 50 метров, так как преобразователи, как правило, устанавливаются в электрощитовой. В этой ситуации, установка дросселей и фильтров на выходе преобразователей частоты - это эффективный способ ограничения пиков напряжения. Кроме ограничения параметров импульсов напряжения, допустимые (1000 В, 2 мкс), выходные устройства призваны снижать уровень гармоник напряжения и тока, подводимых к зажимам двигателя. Выходные устройства можно подразделить на [1]: 1. Дроссели du/dt ; 2. Моторные дроссели; 3. Синус фильтры; 4. Фильтры, подключаемые к зажимам двигателя. Несмотря на то, что дополнительные устройства несколько увеличивают стоимость внедрения преобразователя частоты, они будут, в конечном счете, защищать двигатель, исключая выход из строя двигателя и потерю дорогостоящего времени простоя, а в некоторых случаях, например во взрывоопасных помещениях снизят вероятность возникновения аварии.
Выводы
- Рассогласование волнового сопротивления кабеля и волнового сопротивления двигателя, прежде всего, влияет на величину перенапряжения на зажимах двигателя.
- Время нарастания импульса напряжения на выходе инвертора определяет критическую длину кабеля.
- При проектировании систем автоматизации рекомендуется использовать однофазные по входу преобразователи частоты для питания маломощных двигателей, исключив тем самым необходимость защищать двигатель от импульсов перенапряжения.
Перечень ссылок
1. Калашников Б.Е. Проблема «длинного кабеля» в электроприводах с IGBT – инверторами / Б.Е. Калашников // Электротехника, 2002. - № 12. – С. 24 – 26.
2. Пустоветов М.Ю. Моделирование электромагнитных процессов в частотно – регулируемом асинхронном приводе с длинным питающим кабелем / М. Пустоветов, К. Солтус, И. Синявский // Компьютерное моделирование асинхронных двигателей и трансформаторов. С. 157 -167.
3. Обуздание отраженной волны – И. Морозов, ООО «ОПТИМА», Республика Беларусь.
4. Ажнакин В.А. Яцук В.Г. Исследование волновых процессов в системе преобразователь частоты - соединительный кабель – электрический двигатель // Вопросы электромеханики т.133. Электромеханическое оборудование и автоматические системы управления.2013г. С. 49 – 52.
5. Лапко И. Преобразователи частоты Delta Electronics могут работать на расстоянии до 200 – 300 м от двигателя / И. Лапко // Электрик, 2015. - №9 – С. 20 – 23.
6. Liwei Wang, Carl Ngai-Man Ho, Francisco Canales, Juri Jatskevich; High-Frequency Modeling of the Long-Cable-Fed Induction Motor Drive System Using TLM Approach for Predicting Overvoltage Transients/ IEEE TRANSACTIONS ON POWER ELECTRONICS, Vol. 25, No. 10, October 2010, pp. 2653-2664.