
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Goal and tasks of the research
- 3. Classification of mobile robots
- 4. Analysis of algorithms for controlling a mobile robot
- 4.1 Mobile robot is the determining obstacle
- 4.2 Mobile robot moving along the line
- 4.3 Remote control of the mobile robot
- 4.4 Managing mobile robots with voice commands
- References
Introduction
Currently, the robotics section is developing rapidly, which is engaged in the creation of mobile robots.
Robotics is an applied science engaged in the development of automated technical systems and is the most important technical basis for intensifying production. At the present time, a rather large number of tasks related to the organization of automatic movement of a robot and the fulfillment of certain elementary actions are being solved [1]. Among the various classes of robots, the important modern class are mobile robots placed on a mobile base, which are used in industry (robocards), ecology (dynamic environmental monitoring, work in environmentally harmful conditions), military (robot reconnaissance, robot carrying light armament, etc.), household robot (autonomous vacuum cleaners, lawn mowers, etc.) [2].
However, it is difficult to create robots that confidently move even on an even surface, on which there are insuperable obstacles for them, for several reasons, including due to imperfection of control algorithms.
1. Theme urgency
A robust algorithm for controlling the movement of electric drives of mobile robots is fundamental for successful work.
In addition to the theoretical significance, the tasks of controlling the movement of mobile wheeled robots have recently become increasingly practical in various fields of engineering and technology. The spectrum of solved problems is very wide: from gaming tasks to special security tasks. High requirements to the characteristics of the movement of robots necessitate the use of mathematical and computer simulation tools at all stages of the synthesis of control algorithms [3]. Therefore, research in this area is an urgent task.
2. Goal and tasks of the research
The purpose of the master's work is to study the possible algorithms for controlling electric drives for mobile robots.
The main objectives of the study:
- Study of control algorithms for mobile robots;
- Realization of the mobile robot using the current algorithms of electric drives control;
- Selection of the microcontroller and the robot's hardware;
- Designing a mathematical model of a mobile robot using the MATLAB software package;
- Analysis of the results.
3. Classification of mobile robots
A mobile robot is a robot that can move around and move in space.
One of the main criteria for dividing mobile robots into classes is the mode of transportation:
- The wheel method is the most common mode of transportation, which, depending on the number of wheels used, can be divided into subclasses. The advantage of using a small (from 1 to 2) number of wheels can be the simplicity of the design and excellent maneuverability, on the other hand, the increase in the number of wheels extends the area of ??contact with the surface, which significantly improves the patency.
- Caterpillar method – most often used in combat robots, as the use of caterpillars significantly improves cross-country terrain.
- The walking way – using analogues of legs for movement increases the complexity of design, but modern technologies do not allow achieving stability, close to human.
- Movement by air – it refers to the so-called UAV (unmanned aerial vehicle), rockets, as well as aircraft and helicopters equipped with an autopilot.
- Floating method – using propellers or wind forces for movement, able to move above and under the water, this method includes the UFAA (unmanned floating device) and also ships equipped with an autopilot [4].
4. Analysis of algorithms for controlling a mobile robot
4.1 Mobile robot is the determining obstacle
The most common motions of the robot are movements associated with circumvention of objects for which the only restriction is that the robot does not collide with objects in the workspace. Therefore, when developing various tasks, it is important to plan the movements of the mobile robot, taking into account the circumvention of obstacles. In different areas, various algorithms for avoiding obstacles were proposed. There are some algorithms designed to bypass the robot obstacles in three-dimensional space.
Algorithms can be divided into several classes:
- Hypothesis is a test;
- Penalty function;
- Method of skeletonization;
- Fuzzy logic.
The main advantage of the method is the hypothesis – the test
lies in its simplicity. The main computational operations of the method are the
determination of possible collisions and the modification of ways to prevent collisions.
The second class of obstacle avoidance algorithms is based on the definition of the penalty function for the configuration of the mobile robot, by means of which the presence of objects is encoded.
Skeleton algorithms reduce the free space of the robot to a one-dimensional representation, for which the task of path planning becomes simpler. Such a representation with a smaller number of dimensions is called the skeleton of the configuration space.
The fuzzy logic system produces a unique transformation of the vector of input signals into a vector of output signals. For this transformation, a fuzzy inference mechanism is used, based on the knowledge laid down by the expert [5].
The algorithm for determining the obstacle is realized by installing the HC-SR04 ultrasonic distance sensor on the body of the mobile robot (figure 1), if an obstacle is detected in its path, the robot can go around it and continue moving or changing its path.

Figure 1 – Ultrasonic distance sensor HC-SR04
The sensor determines the distance to objects in the same way as dolphins or bats do. The ultrasonic sensor HC-SR04 generates sound pulses at a frequency of 40 kHz and listens to the echo. By the time of propagation of the sound wave back and forth, it is possible to uniquely determine the distance to the object. It can also be used as a sensor for alarms triggered when objects approach.
Characteristics ultrasonic distance sensor HC-SR04:
- Power supply: 5 V;
- Silent consumption: 2 mA;
- Consumption at work: 15 mA;
- Range of distances: 2-400 cm;
- Effective viewing angle: 15° ;
- Working viewing angle: 30°.
Pin Assignment:
VCC – positive power contact;
GND – negative power contact;
TRIG – digital input;
ECHO – digital output.
Figure 2 – Principle of operation of ultrasonic sensor HC-SR04
(animation: 7 frames, 8 reiteration cycles, 34 kilobytes)
The principle of operation of the ultrasonic sensor HC-SR04 (figure 2). A high-level pulse of 10-15 microseconds is applied to the Trig input of the sensor. The sensor sends an ultrasonic chirp signal from eight short pulses above the human hearing range limit. The sensor electronics know the speed of sound in the air. By measuring the time between sent and received ultrasound, the ultrasonic sensor HC-SR04 generates an output signal. After about a microsecond, the ultrasonic sensor HC-SR04 outputs an Echo outputThe high-level pulse lasts up to 38 milliseconds. If no obstacles are detected, then the output will be a signal with a duration of 38 ms. Thus, to work with the sensor from the electronics of the device, one digital control output and one input for the sensor signal are required. The pulse length at the output Echo is proportional to the distance to the obstacle.
It is worth noting that the speed of sound in the air depends on the temperature. This factor affects the accuracy of the sensor [6].
4.2 Mobile robot moving along the line
The algorithm controls the movement of the mobile robot along the black strip on a light background (figure 3).
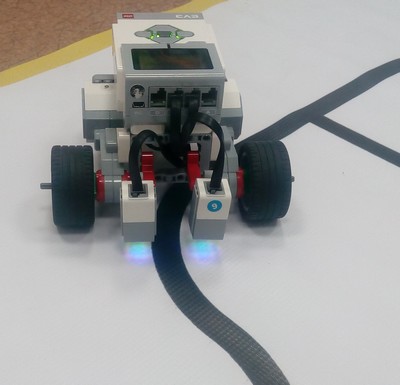
Figure 3 – Example of a robot with movement along the line
To solve this problem, you can use the digital sensor line TCRT5000 (figure 4).

Figure 4 – Digital TCRT5000 line sensor
Digital sensor, allows you to track the movement of the robot along the line. The sensor distinguishes two colors: black and white (light). The signal is output as a logical 0 or 1, depending on the color: 1 – black, 0 – not black.
The main photocell works in the infrared spectrum. In addition, the sensor is equipped with an LED that lights up when the surface under the sensor is light. This is convenient for diagnosis and configuration. A variable resistor mounted on the sensor will allow you to adjust the sensitivity of the sensor in a wide range. This allows the sensor to be calibrated to the robot design, coating material and various ambient light conditions.
The sensor can be attached to the bottom of the mobile platform to force the robot not to travel outside the territory designated by the circuit, or to follow the black line.
This sensor emits an infrared signal and then catches the reflection of this infrared signal from the surface. This sensor can also be used as an alternative to the Hall sensor to determine the rotational speed [7].
Characteristics digital TCRT5000 line sensor:
- Distance to the measured object: 12 mm;
- Current consumption: 10 mA;
- Working wavelength: 950 mm;
- Sounding method: reflection;
- Power supply: 5 V.
To optimize traffic on the line requires the presence of two line sensors, then the algorithm will be as follows:
- If both sensors see a white color – the robot moves forward;
- If one of the sensors sees white and the other one is black, the robot turns to the black side;
- If both sensors see a black color – the robot stops, or continues its journey until the search for a black line [8].
4.3 Remote control of the mobile robot
In addition to the ability to access different locations, robots should be able to be controlled from a distance, Today, not all processes can be automated when the robot functions. The increased number of features and functions performed by robots has turned management devices into complex and cumbersome sets of levers and buttons, the management of which requires additional training and skills.
In place of control panels can come more versatile devices – smartphones. In connection with the development of microelectronics, smartphones have become one of the most popular devices in the modern world. Such popularity leads to the fact that they are sold annually by billion parties around the world, which means that they have long been a replacement for mobile phones and there are almost every person. The growing mobile technology market turns the smartphone into a universal assistant for the user when interacting with various physical devices and services on the Internet. Based on this, we can conclude that modern smartphones, like nothing else, are suitable for the role of a universal and multifunctional remote control device [10].
For remote control of the mobile robot, you can use the Bluetooth Module HC-05 (figure 5). it is a convenient means for organizing the management of microcontroller devices using a phone or tablet.
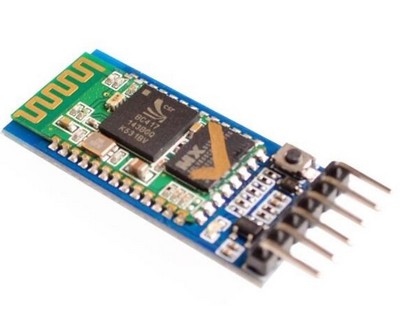
Figure 5 – Bluetooth Module HC-05
Bluetooth is perhaps the most common type of connection for short distances that most modern electronic devices use.
The HC-05 module is a widely used module for connecting devices through a Bluetooth connection. The Bluetooth module is controlled by means of UART, that is, in fact is a UART-to-Bluetooth converter [11].
4.4 Managing Mobile Robots with Voice Commands
The development of a speech control system for a robot is a complex and time-consuming process. First, you need to recognize the voice message, and then translate it into the command sequence of the robot's control language and enforce them. The only claim
for completeness criterion of correctness of understanding the command by the robot is to perform the required actions. It would be expensive and unreasonable to spend the whole process of debugging the system over a living
robot. Therefore, when creating a
speech control system for the robot to simplify the development process and accelerate it, and improve the quality of all components of the system, it makes sense to use not a robot materialized in the metal
but its software model or simulator. The main
requirement for such a simulator is the exact execution of commands given to the robot. It can consist, for example, in changing the position of objects on the monitor screen or issuing voice messages, as if emanating from the robot itself. Using the simulator
allows you to better and more accurately pick and debug the command system of the robot. The customer already at the initial stages of work can judge by the robot's model of its capabilities and make the desired adjustments. In addition, the use of the robot
simulator allows you to fine tune the speech control system, facilitates and accelerates the development and debugging of the linguistic processor. The customer already at the initial stages of work can judge by the robot's model of its capabilities and make
the desired adjustments. In addition, the use of the robot simulator allows you to fine tune the speech control system, facilitates and accelerates the development and debugging of the linguistic processor. The customer already at the initial stages of work
can judge by the robot's model of its capabilities and make the desired adjustments [9].
In general, over the past five years, significant progress has been made in solving the problem of computer speech recognition, and the leaders in this area are the development of GoogleSpeech from Google and Siri from Apple. These technologies are based on statistical models: combinations of Hidden Markov models (SMMs) and neural networks. In the preprocessing phase of the speech signal, mainly the cepstral coefficients on the chalk scale (MFCC) are used, which make it possible to compactly describe the signal spectrum. However, the disadvantage of these software solutions is that they require communication with the Internet and access to large collections of voice data for training. In addition, mobile robots need to take into account specific noise from their own motion [10].
The subject of developing mobile robots was started in the bachelor's degree. A video review of the bachelor's work is presented below:
At the time of writing this abstract of master's work is not yet complete. The estimated date of completion of the master's work: June 2018. The full text of work and materials on the topic can be obtained from the author or his adviser after that date.
References
Робототехника
// Википедия, статья [Электронный ресурс] – Режим доступа: ru.wikipedia.org, свободный.- Звонарев Д.А. Управление мобильным роботом с электрическим двигателем / Д.А. Звонарев // Известия Тульского государственного университета. – 2011. – c. 368 – 372.
- Бурдаков С.Ф. Алгоритмы управления движением мобильного робота в задаче преследования / С.Ф. Бурдаков, П.А. Сизов // Журнал
Научно-технические ведомости СПбГПУ
. – 2014. – c. 49 – 58. - Колпаков С. Г., Мячиков А. Д. Классификация роботов по использованию, передвижению и компонентам // Молодой ученый. – 2017. – №3. – c. 241 – 244.
- Васюк А.О. Планирование пути автономного робота в изменяющейся окружающей среде / А.О. Васюк, Р.М Бабаков // VI міжнародна науково-практична конференція молодих учених
Сучасна інформаційна Україна: інформатика, економіка, філософія
. – Донецьк, ДонНТУ – 2012. – с. 267 – 271. - Ультразвуковые датчики [Электронный ресурс] – Режим доступа: HC-SR04, свободный.
- Инфракрасный датчик TCRT5000 работающий на принципе отражения света [Электронный ресурс] – Режим доступа: tcrt5000, свободный.
- Движение по линии с двумя датчиками [Электронный ресурс] – Режим доступа: studrobots.ru, свободный.
- Загорулько Ю.А. Моделирование робота, управляемого речевыми сигналами / Ю.А. Загорулько // Журнал
Известия Томского политехнического университета
. – 2011. – c. 98 – 102. - Шарий Т.В. Голосовое управление мобильным роботом на основе когнитивной модели FCAS / Т.В. Шарий //
Штучний інтелект
– 2014. – c. 75 – 84.