Аннотация
William Goetzler, Timothy Sutherland, Callie Reis Частотно-регулируемый привод. В статье рассмотрены особенности применения частотно-регулируемых приводов, их конструкция и принцип работы. Также рассмотрены особенности различных полупроводниковых материалов, используемых для преобразователей частоты.
Электронное управление скоростью электродвигателей становится все более распространенным, поскольку стоимость полупроводниковой силовой электроники снижается. Устройства, обеспечивающие управление скоростью, имеют множество наименований, включая:
- Преобразователи частоты;
- Регулируемые скоростные приводы;
- Преобразователи частоты;
- Частотно-регулируемые приводы;
- Приводы с векторным управлением.
Название часто зависит от типа двигателя, соединенного с устройством. Например, термин частотно - регулируемый привод обычно связан с трехфазными асинхронными двигателями переменного тока. Хотя устройства с регулируемой скоростью не все идентичны, основные принципы работы остаются неизменными. Этот раздел отчета относится к устройствам управления переменной частотой в общем как Частотно-регулируемые приводы
и предоставляет подробное описание их возможностей, эффективности и применения. Любое заметное отличие в конструкции или работе устройства управления переменной частотой адресуется в последующих разделах.
Переменные нагрузки встречаются часто в коммерческом и жилом секторах. Трехфазные асинхронные двигатели часто соединяются с приводами переменной скорости для использования с вентиляторами, компрессорами и насосами в коммерческих и промышленных применениях. Питательные циркуляционные насосы котла обеспечивают общий пример преимуществ использования двигателей с переменной скоростью вращения. В обычных конструкциях с двигателями с фиксированной скоростью насосы имеют большой размер, чтобы обеспечить максимальную ожидаемую нагрузку или обеспечить дальнейшее увеличение пропускной способности системы. При использовании частотно-регулируемого привода скорость двигателя можно регулировать в соответствии с фактическими эксплуатационными требованиями системы. Из-за законов близости, для насосов, вентиляторов и компрессоров, соотношение между скоростью и мощностью таково, что 10%-ное снижение скорости обычно приводит к снижению мощности на 30%. Поэтому работающие насосы, вентиляторы или компрессоры на более низких скоростях в течение более длительного времени могут привести к снижению общего потребления энергии. Работа на низкой, более постоянной скорости также устраняет резкие колебания температуры или расхода и другие потери системы, связанные с включением/отключением обычных односкоростных систем.
В приложении с постоянной неизменной нагрузкой, добавление частотно-регулируемого привода может фактически снизить общую эффективность из-за неэффективности самого привода. Однако в реальности большинство систем в жилом и коммерческом секторах могут получить преимущества от частотно-регулируемого привода. Системы редко работают на проектной нагрузке из-за спроектированных факторов безопасности, преднамеренного завышения габаритов разработчиками и пользователями, или по условиям окружающей среды. На рисунке 2.6 показано, как КПД привода регулируемой скорости снижается при частичной нагрузке. Наибольшее снижение эффективности происходит при условиях неполной нагрузки менее 25% номинальной выходной мощности привода. Близкая к максимальной эффективность достигается для частичной нагрузки выше 25% номинальной выходной мощности привода.
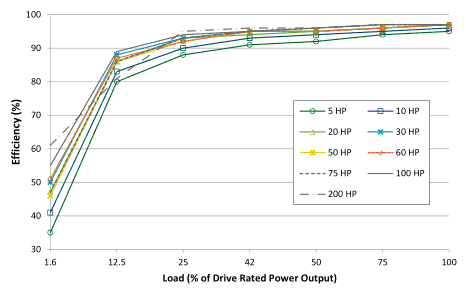
Рисунок 2.6 – Зависимость КПД преобразователя частоты от нагрузки привода
Частотно-регулируемый привод позволяет двигателю работать со скоростью, отличной от фиксированной скорости, которая определяется частотой линии переменного тока (60 Гц в Северной Америке) и числом полюсов двигателя. Это достигается путем изменения частоты и напряжения, подаваемого на двигатель. Преобразователи частоты состоят из выпрямителя для преобразования входного переменного тока в постоянный ток. Затем диодный мост или силовой транзистор модулирует выходной сигнал постоянного тока, чтобы сформировать сигнал подобный переменному току с частотой и напряжением (или током), желательным для применения двигателя. Силовые транзисторы используют широтно-импульсную модуляцию (ШИМ) для создания выходного сигнала путем включения и выключения питания постоянного тока. Изменяя длительность импульса, преобразователь частоты может приближать синусоидальную форму волны для плавной работы. Во время фазы включения пульсации энергия сохраняется в обмотках двигателя как индуктивность и высвобождается во время фазы выключения. Эта конфигурация обеспечивает непрерывный ток, подаваемый на двигатель [1].
Выходные силовые транзисторы, используемые для коммутации в коммерчески доступных преобразователях частоты, обычно представляют собой биполярные транзисторы с изолированным затвором (IGBT) на основе кремния (Si), интегрированные с шунтирующими диодами, которые уменьшают влияние колебаний напряжения, связанных с ШИМ. Имея номинальную эффективность 95-98%, преобразователи частоты с IGBT имеют недостатки, которые включают [2]:
- Количество тепла, генерируемого коммутационными операциями;
- В результате дополнительные затраты на охлаждение;
- Гармонические искажения тока в симулированной синусоидальной форме.
Кроме того, преобразователь частоты требует обмотки двигателя для хранения индуктивности и может привести к пробою изоляции в обмотке или создать дополнительные нагрузки на подшипники двигателя [3].
Недавние исследования показали, что использование широкозонных полупроводников (WBG) вместо обычных полупроводниковых материалов, таких как кремний, в коммутаторах, может улучшить производительность и эффективность приводов с переменной скоростью. Широкозонные полупроводники имеют более высокий энергетический зазор – энергетический диапазон в твердом теле, где не может существовать никаких электронных состояний, что позволяет им работать как при более высоких температурах, так и при более высоких частотах. Работа при более высоких температурах устраняет необходимость внешнего охлаждения и решает некоторые проблемы, связанные с выработкой тепла [4]. Более высокие частоты переключения могут также приводить к более тихим приводам. Переход к WBG-материалам также дает возможность снизить общий размер преобразователей частоты, что может быть выгодным в замкнутых пространствах или коммерческих приложениях [5].
Два WBG-материала были приняты для использования в преобразователях частоты и включают:
- Карбид кремния (SiC);
- Нитрид галлия (GaN).
Диоды на основе карбида кремния были впервые применены более десяти лет назад, но их было сложно изготовить. Транзисторы на основе нитрида галлия могут быть проще и дешевле в производстве, но как устройства из карбида кремния, так и из нитрида галлия остаются значительно более дорогостоящими, чем IGBT на основе кремния. Кроме того, надежность материалов WBG неизвестна. Поскольку эти устройства еще не работают в течение всего срока службы продукта, мало что можно сказать об их временных или усталостных характеристиках [5]. Тем не менее, исследования показывают, что значительное снижение потерь при переключении может быть достигнуто с использованием полупроводников WBG. Производители полупроводников продолжают изучать технологию [6].
Одна из компаний показала, что транзисторы с высокой электронной подвижностью GaN (HEMT) более эффективны, чем IGBT при использовании в приводах с переменной скоростью. Высокая частота ШИМ, доступная для GaN HEMT, может создавать плавный синусоидальный ток с меньшим количеством гармонических возмущений, что более эффективно, чем выход IGBT. GaN HEMT также устраняют необходимость в шунтирующих диодах. Это может продлить срок службы двигателя за счет ограничения индуктивности обмоток двигателя и износа подшипников двигателя [3].
Широкое распространение частотно-регулируемых приводов было частично ограничено дополнительной стоимостью компонентов, необходимых для их реализации. Частотно-регулируемые приводы также требуют разработки и реализации алгоритмов управления. Хотя более современные двигатели с переменной скоростью вращения со встроенными элементами управления могут уменьшить сложность внедрения частотно-регулируемых приводов, многие приложения будут требовать чтобы производители систем контролировали надлежащим образом встраивание управления переменной скоростью в свое оборудование. Исторически сложилось так, что это был барьер, ограничивающий быстрое внедрение технологий с переменной скоростью двигателя.
Список использованной литературы
- Arthur D. Little, Inc. (ADL). 1999.
Opportunities for Energy Savings in the Residential and Commercial Sectors with High–Efficiency Electric Motors.
December 1, 1999. - Novak, Peter. 2009.
The Basics of Variable-Frequency Drives.
Electrical Construction & Maintenance (EC&M). May 1, 2009. Retrieved from http://ecmweb.com... - Wu, Y – F. et al. 2012.
High-Frequency, GaN Diode–Free Motor Drive Inverter with Pure Sine Wave Output.
Power Transmission Engineering. 40 – 43. October 2012. Retrieved from https://powertransmission.com.... - Neudeck, Philip G. et al. 2002.
High-Temperature Electronics – A Role for Wide Bandgap Semiconductors?
Proceedings of the IEEE Vol. 90, No. 6, 1065 – 1076. June 2002. - Compound Semiconductor. 2012.
SiC and GaN Electronics: Where, When and How Big?
July 27, 2012. Retrieved from http://www.compoundsemiconductor.net.... - Palmour, John W. 2006.
Energy Efficient Wide Bandgap Devices.
IEEE 2006. Retrieved from: http://www.cree.com....