Аннотация
Мирошник Д.Н., Поляков Н.Е., Сухов А.А. Разработка мобильного робота на базе STM32F4. В работе представлена разработанная модель мобильного робота. Его основу составляет отладочная плата STM32F4, все детали взяты из подручных средств. Модель может осуществлять основные типы передвижений при помощи четырехдвигательного электропривода в соответствии с сигналом ультразвукового датчика расстояния.
Создание мобильных роботов-манипуляторов, способных заменить человека на многих участках современного производства, а также автоматических систем, которые могут быть использованы в условиях, опасных для человека, является актуальной научной и технической проблемой. Сегодня роботы могут выполнять довольно сложную работу, их широко применяют на производстве, в организации работы складов, в военном деле, в медицине и просто для развлечения.
Роботы в зависимости от назначения могут иметь разную конструкцию, размер и уровень интеллекта [1]
На кафедре Электропривод и автоматизация промышленных установок
разработана действующая модель мобильного робота (рис.1), основой данного робота является отладочная плата STM32F4. На первом уровне робота (рис.2) расположены 4 двигателя постоянного тока, два драйвера для управления двигателями, а также колеса, рама и т.д. На втором уровне (рис.3) находится сама отладочная плата, ультразвуковой датчик приближения HCSR04, питание для драйверов и платы, плата для преобразования сигнала с ультразвукового датчика.
Большая часть материалов робота были взяты из подручных средств. Драйвера были сделаны собственноручно на основе микросхемы L298N. Двигатели постоянного тока были взяты из принтеров, автономное питание осуществляется с помощью литий-ионных батарей взятых с ноутбука. Для безопасной работы литий-ионных аккумуляторов в виду их взрывоопасности предусмотрены предохранители.
Управление и программирование осуществляется с помощью Matlab (библиотек Simulink и Waijung). Робот может сам передвигается (вперед-назад-вправо-влево), останавливаться при возникновении препятствия и разворачиваться на месте для поиска свободного места и дальнейшего движения.
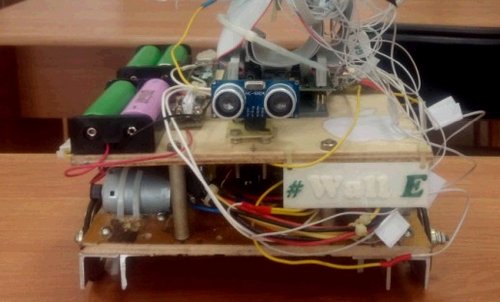
Рис. 1 – Общий вид робота
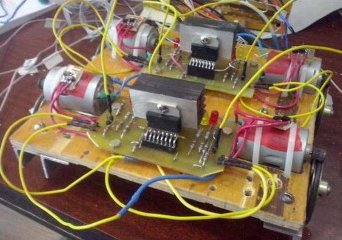
Рис. 2 – Первый уровень робота

Рис. 3 – Второй уровень робота
Ниже приведена принципиальная схема (рис.4) соединения датчиков драйверов с отладочной платой, а также модель для программирования робота (рис.5).
Для специальности Электромеханические системы автоматизации и электропривод
данный робот очень важен в контексте мотивации обучения. Навыки, полученные с его помощью, позволят закреплять теоретические знания по дисциплинам Моделирование электромеханических систем
, Теория электропривода
,
Теория автоматического управления
, Системы управления электроприводами
, Программирование
и т.д.
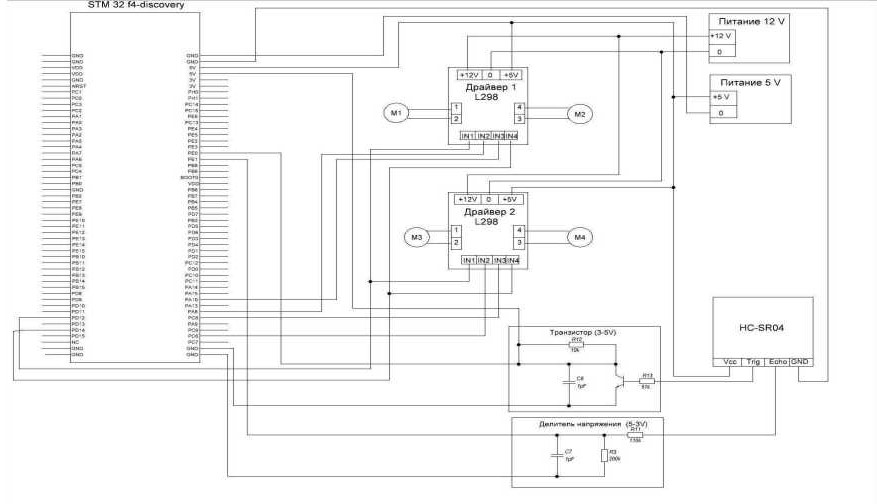
Рис. 4 – Принципиальная схема
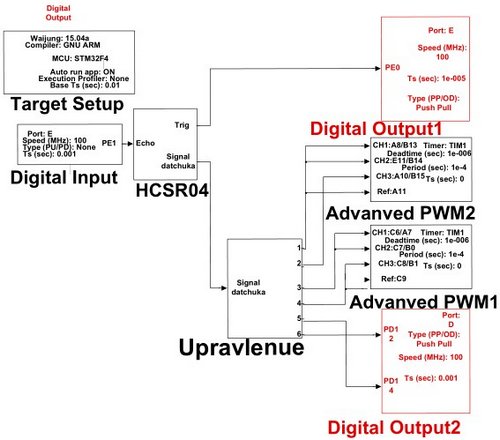
Рис. 5 – Модель для программирования мобильного робота
Литература
- А.А. Андраханов Автономные мобильные роботы: современные разработки и методы управления // IX Международная конференция
Кибернетика и высокие технологии XXI века
, Воронеж: Изд-во ВГУ, 2008, Т.2-С. 1141 – 1152.