Разработка интеллектуальной системы управления электроприводом инвалидной коляски
Авторы: А.А. Ашибоков, А.П. Фомин
Источник: Московский государственный машиностроительный университет (МАМИ) – 65-я Открытая студенческаянаучно-техническая конференция СНТК УНИВЕРСИТЕТА МАШИНОСТРОЕНИЯ
– Сборник работ – 838с. – с. 63 – 68
Аннотация
В настоящее время актуальна задача социальной адаптации людей с ограниченной подвижностью в связи с дефектами опорно-двигательного аппарата. Она решается различными средствами, в том числе использованием инвалидных колясок с электроприводом колес. Такие коляски обеспечивают необходимую подвижность в условиях квартир, на улицах в парковых зонах и иных условиях.
Целью данной работы является, разработка интеллектуальной системы управления электроприводом инвалидной коляски. Для достижения данной цели были поставлены следующие задачи:
- определение структуры системы управления;
- разработка математической модели поворота коляски и определение закона уравнения электроприводом;
- исследование получаемых траекторий поворота, для принятого закона управления;
- разработка алгоритма управления электроприводом.
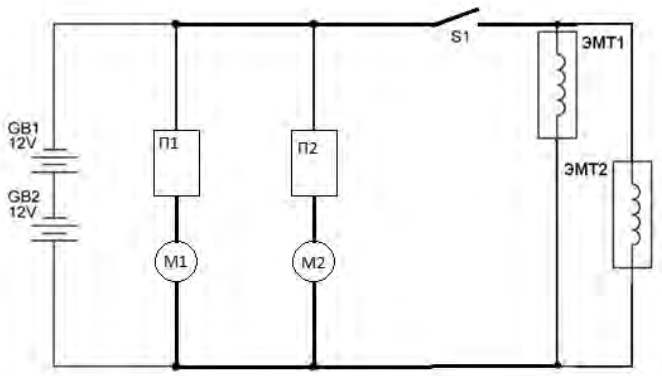
В качестве прототипа взят экспериментальный электропривод, собранный на базе инвалидной коляски фирмы Meyra с двумя электродвигателями постоянного тока. Силовая схема электропривода представлена на рис. 1, где, М – это электродвигатели постоянного тока, GB – аккумуляторные батареи, П - мостовой преобразователь постоянного напряжения, ЭТМ – электрические тормоза, S - предохранитель.
Регулирование скорости вращения колес осуществляется за счет подводимого к двигателям напряжения питания путем изменения скважности преобразователя напряжения. Формирование скважности для каждого двигателя осуществляется перемещением двухкоординатного джойстика.
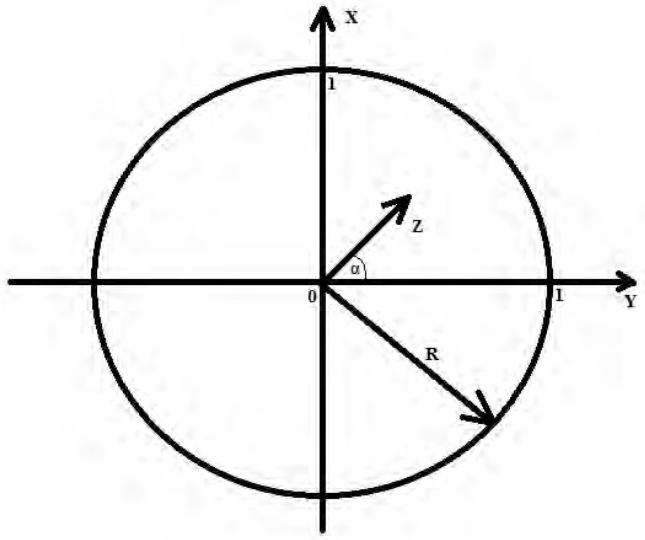
Перемещения джойстика можно представить в виде окружности на координатной плоскости (рис. 2), где r – максимальное перемещение джойстика, z – вектор перемещения джойстика. Модуль вектора z определяет скорость движения и ускорения, а угол вектора α определяет координаты по осям х, у, влияющий на величину скважности преобразователя напряжения для каждого двигателя. Значение х задает продольную скорость инвалидной коляски, а у – поперечную.
В эксплуатации инвалидная коляска должна иметь возможность осуществлять движение как вперед, так и назад, способна осуществлять как автомобильный поворот с внешним центром поворота, так и карусельное движение (вокруг внутренней оси) в условиях замкнутого пространства. Было принято, что движение вперед и назад соответствует перемещению джойстика по оси х, при этом скорости вращения колес должны быть равны и направлены в одну сторону. Для осуществления карусельного поворота вправо или влево перемещение джойстика должно осуществляться по оси y соответственно, при этом скорости вращения колес равны, но направлены в противоположные стороны. Автомобильному повороту соответствует перемещение джойстика по двум осям одновременно.
Учитывая особенности движения и необходимость получения единого и простого алгоритма управления электродвигателями для всех режимов работы, , был предложен следующий закон формирования скважности для электродвигателей внешнего и внутреннего колес на повороте.

Предполагается что zвнеш и zвнут пропорциональны скважности преобразователя напряжения соответствующих колес.
Предложенные законы были исследованы расчетам изменения zвнеш и zвнут при различных положениях джойстика. Было рассмотрено 2 типа изменения положения джойстика:
- по фиксированной окружности (при неизменном z);
- по перемещению в сторону (при неизменном х=0,5).
В таблице 1 и 2 представлены результаты расчетов. На рис.3 представлен график зависимости zвнут от угла α. Из графика видно, что при перемещении джойстика по окружности величина zвнут изменяется от -1 до 1. График имеет нелинейный, но непрерывный характер. Следовательно предложенный закон позволяет получить все значения zвнеш и zвнут для всех схем поворота.
Таблица 1 – Формирования скорости от положения джойстика по окружности.
альфа |
x |
y |
zвнеш |
zвнутр |
0 |
0 |
1 |
1 |
-1 |
15 |
0,258819 |
0,965925826 |
1 |
-0,93185 |
30 |
0,5 |
0,866025404 |
1 |
-0,73205 |
45 |
0,707107 |
0,707106781 |
1 |
-0,41421 |
60 |
0,866025 |
0,5 |
1 |
0 |
65 |
0,906308 |
0,422618262 |
1 |
0,154763 |
70 |
0,939693 |
0,342020143 |
1 |
0,31596 |
75 |
0,965926 |
0,258819045 |
1 |
0,482362 |
80 |
0,984808 |
0,173648178 |
1 |
0,652704 |
85 |
0,996195 |
0,087155743 |
1 |
0,825689 |
90 |
1 |
6,12574E-17 |
1 |
1 |
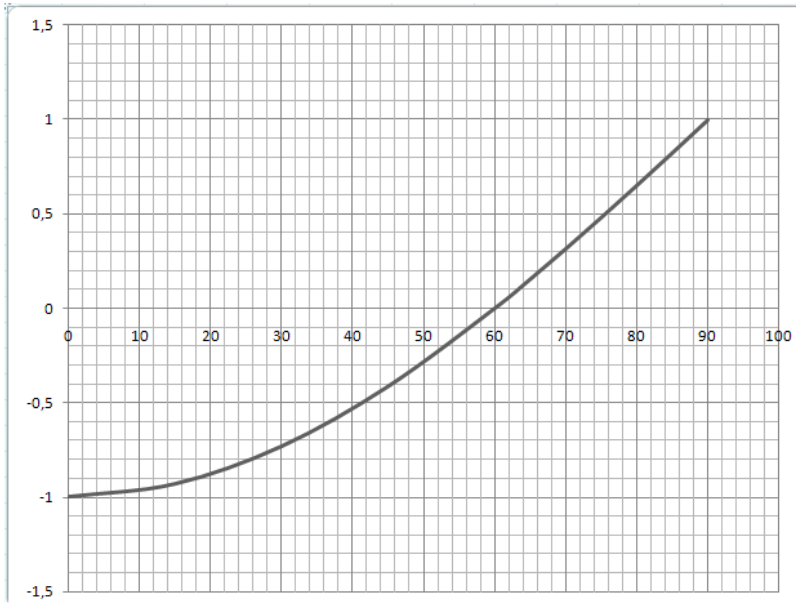
Таблица 2 – Формирования скорости от положения джойстика при фиксированном х
x |
y |
zвнеш |
zвнутр |
0,258819 |
0,1 |
0,277466 |
0,07746585 |
0,258819 |
0,2 |
0,327089 |
-0,07291087 |
0,258819 |
0,3 |
0,396216 |
-0,20378377 |
0,258819 |
0,4 |
0,476432 |
-0,32356816 |
0,258819 |
0,5 |
0,563016 |
-0,43698375 |
0,258819 |
0,6 |
0,653443 |
-0,54655735 |
0,258819 |
0,7 |
0,746316 |
-0,65368418 |
0,258819 |
0,8 |
0,840825 |
-0,75917463 |
0,258819 |
0,9 |
0,936476 |
-0,863524 |
0,258819 |
1 |
1,032951 |
-0,96704923 |
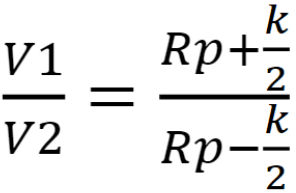
Дополнительно при тех же расчетных условиях определено изменение радиуса поворота. Принята следующая расчетная схема (рис. 4) поворота коляски в виде векторов скоростей колес и радиуса поворота. Предполагается, что механические характеристики электродвигателей абсолютно жесткие и величина z однозначно определяет поступательную скорость колеса. Как видно из схемы мы имеем 2 треугольника со сторонами:
- V1, R+k;
- V2, R-k.
Согласно закону подобия треугольников получаем соотношение:
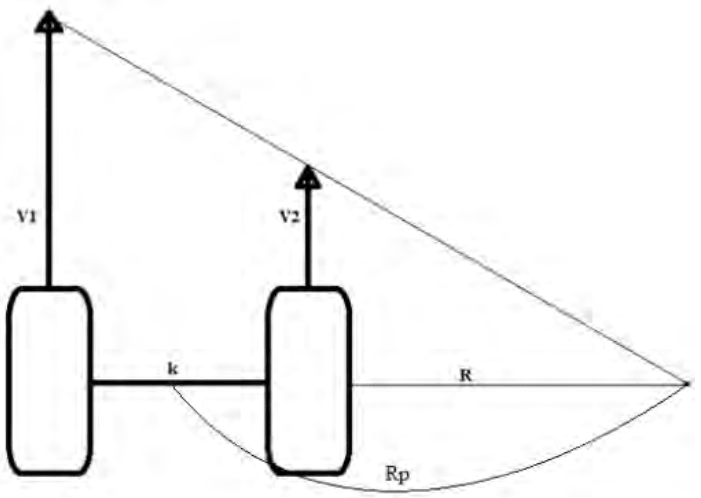
Примем V1/V2 = t, отсюда получаем что радиус поворота равен:
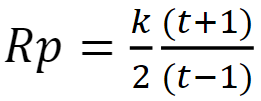
Результаты расчета радиуса поворота представлены в таблице 3. На рис.5 представлен график изменения радиуса поворота от перемещения джойстика. Как видно из графика радиус поворота изменяется от 0 до бесконечности, принятых закон управления обеспечивает все схемы движения от движения вперед до карусельного поворота через автомобильный поворот. Варьирование коэффициента интенсивности разгона ki (режим заяц -черепаха) не изменяет схему движения. Как видно из таблицы 4 и 5, при различных z или ki изменяется лишь скорость осуществления маневра.
Таблица 3 – Расчет радиуса поворота
альфа |
x |
y |
zвнеш |
zвнутр |
Rp |
0 |
0 |
1 |
1 |
-1 |
0 |
15 |
0,258819 |
0,965925826 |
1 |
-0,93185 |
1,1112 |
30 |
0,5 |
0,866025404 |
1 |
-0,73205 |
4,873067 |
45 |
0,707107 |
0,707106781 |
1 |
-0,41421 |
13,04773 |
60 |
0,866025 |
0,5 |
1 |
0 |
31,5 |
65 |
0,906308 |
0,422618262 |
1 |
0,154763 |
43,03535 |
70 |
0,939693 |
0,342020143 |
1 |
0,31596 |
60,59984 |
75 |
0,965926 |
0,258819045 |
1 |
0,482362 |
90,20665 |
80 |
0,984808 |
0,173648178 |
1 |
0,652704 |
149,9013 |
85 |
0,996195 |
0,087155743 |
1 |
0,825689 |
329,922 |
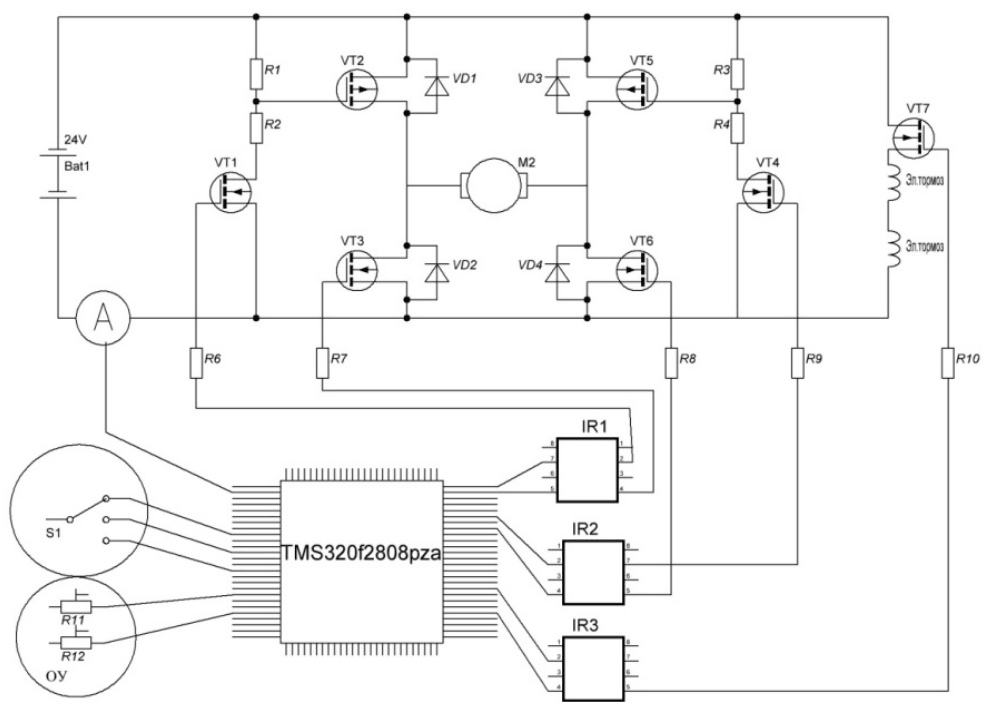
Структурная схема систем, обеспечивающая управление по описанному закону представлена на рис. 6, где ОУ – органы управлении (представлены в виде джойстика и переключателя интенсивности разгона), TMS 320 f2808 – микроконтроллер, IR – драйвера (служат для усиления сигнала и гальванической развязки силовой части и управляющей), A – датчик тока, измерительный шунт (для обратной связи по току), VT – транзисторные ключи. С джойстика на порты микроконтроллера приходят аналоговые сигналы по двум координатам, которые в дальнейшем преобразуются в цифровой код встроенным АЦП. С микроконтроллера на драйверы посылается сигналы вкл/выкл и ШИМ сигналы. Драйвера усиливают сигнал и передают его на затворы транзисторных ключей полупроводникового преобразователя открывая или закрывая их. В качестве обратной связи служит датчик тока (шунт), информация с которого передается на один из портов через усилитель сигнала. Управление осуществляется программным путем.
Была разработана блок-схема алгоритма программы управления электроприводом инвалидной коляски, которая в укупленных блоках представленной на рисунке 7.
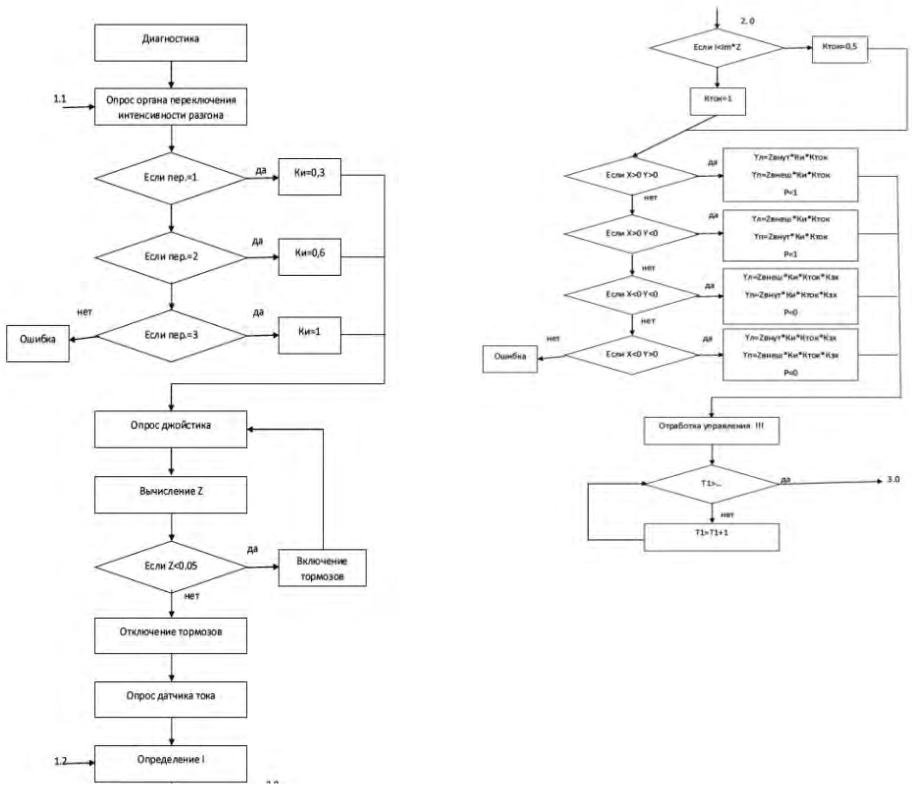
В настоящий момент осуществляется работа по взаимосвязи джойстика и электродвигателей через микроконтроллер, а так же написание программы управления для микроконтроллера, на основе математической модели управления электроприводом инвалидной коляски при криволинейном движении. Вся элементная база (в том числе и микроконтроллер) была выбрана и изучена, на предмет удовлетворения всех нужд.