Микропроцессорная система стабилизации угловой скорости вращения ротора двигателя постоянного тока
Авторы: С.И. Масленникова, А.В. Ситников
Источник: Радиооптика. МГТУ им. Н.Э. Баумана. Электрон. журн. – 2016. – № 01. – с. 19–34.
Аннотация
Одним из основных недостатков двигателей постоянного тока является наличие коллекторного узла. В статье авторы анализируют возможность создания бесколлекторного двигателя
постоянного тока с микропроцессорной системой управления. В статье представлены блок-
схема бесколлекторного двигателя, принципиальные схемы микропроцессорного блока
управления и усилителя мощности, описаны принципы действия некоторых датчиков углового
положения ротора. Авторами предложена система широтно-импульсной модуляции
напряжения, подаваемого на якорные обмотки, с помощью которой можно осуществить
стабилизацию угловой скорости вращения ротора при изменении момента сопротивления на
валу двигателя. В статье представлены результаты испытания предложенной системы
стабилизации угловой скорости вращения двигателя.
Ключевые слова: двигатель постоянного тока, ротор, статор, датчик углового положения
ротора, электромагнитный момент, микропроцессор, якорные обмотки, частота вращения
ротора
Введение
В современных системах автоматического регулирования в качестве исполнительного элемента часто используют двигатели постоянного тока (ДПТ), главными достоинствами которых являются высокое быстродействие, большой пусковой момент, линейная регулировочная характеристика. Кроме того, двигатели постоянного тока с возбуждением от постоянных магнитов более технологичны, чем двигатели со статорными обмотками и, следовательно, имеют меньшую себестоимость.
Однако ряд существенных недостатков ограничивает область применения ДПТ. Наличие щеточно-коллекторного узла приводит к повышенному уровню радиопомех, снижает надежность двигателя, увеличивает его себестоимость, делает невозможным применение ДПТ во взрывоопасной среде. Кроме того, электромагнитный момент, развиваемый двигателем, зависит от угла поворота якоря относительно положения геометрической нейтрали, что приводит к нестабильности угловой скорости вращения ротора внутри одного оборота.
Работу ДПТ можно представить с помощью его механической характеристики, которая имеет вид [1]:
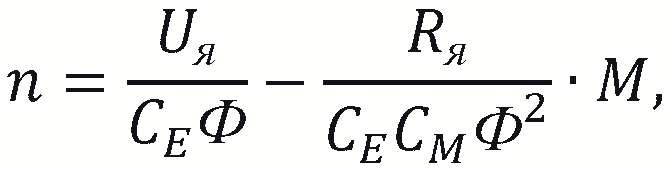
где n – частота вращения ротора; Uя – напряжение питания якорной обмотки; CM, CM – коэффициенты, определяемые конструктивными параметрами двигателя; Φ – магнитный поток, создаваемый системой возбуждения; Rя – активное сопротивление якорной обмотки; M – электромагнитный момент двигателя.
Скорость вращения ротора двигателя будет постоянной при равенстве момента, развиваемого двигателем, и момента сопротивления на валу [2,3]. Графическое изображение механической характеристики представлено на рис. 1.
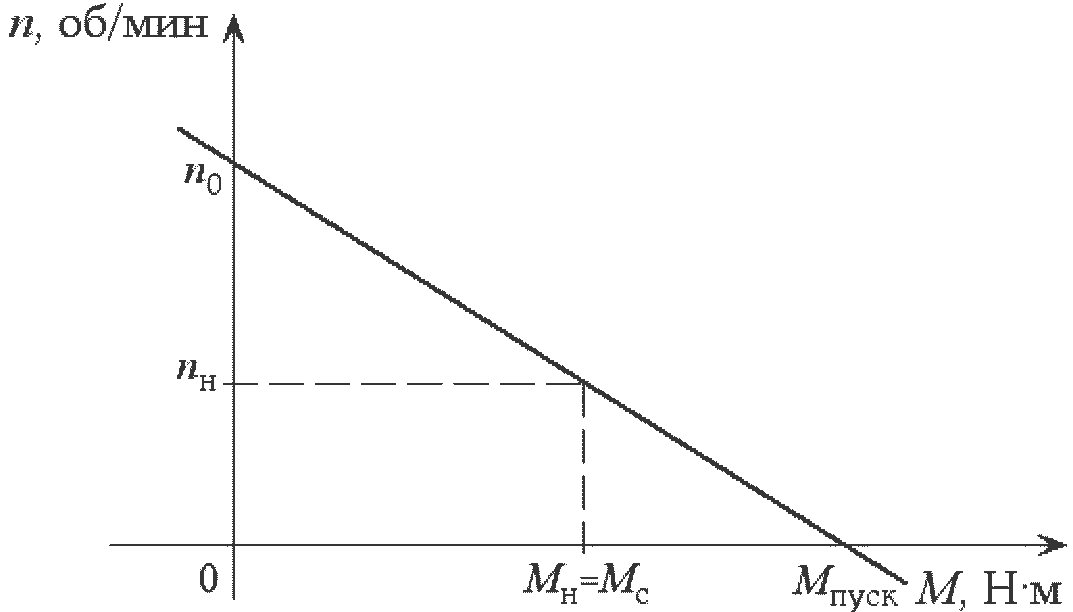
На рис. 1 обозначено: n0 – частота вращения ротора при отсутствии момента сопротивления на валу (скорость холостого хода); nн – номинальная частота вращения; Mн – номинальный электромагнитный момент, развиваемый двигателем; Mс – момент сопротивления на валу; Mпуск – пусковой момент двигателя.
Увеличение момента сопротивления на валу приводит к снижению угловой скорости вращения ротора. При этом будет происходить снижение ЭДС, наводимой в якорной обмотке, при вращении последней в магнитном поле, которое создается системой возбуждения [4]. Увеличение ЭДС приведет к повышению якорного тока, что вызовет повышение электромагнитного момента до уровня, при котором он уравновесит момент сопротивления. Двигатель перейдет в стационарный режим работы на пониженной скорости вращения. Это делает невозможным применение ДПТ в системах, требующих постоянной скорости вращения ротора при переменном моменте сопротивления на валу, без применения системы обратной связи.
Последнее время в различных электромеханических системах широкое распространение получили бесколлекторные двигатели постоянного тока (БДПТ) с цифровой системой формирования управляющих напряжений, подаваемых на обмотки [3]. Цифровая система управления может быть собрана на жесткой логике [5] (чаще всего это программируемые логические интегральные схемы) или с применением микропроцессров. Однако при создании многозадачных перенастраиваемых систем использование микропроцессоров представляется наиболее перспективным. С помощью интеллектуальной системы управления можно не только управлять режимом работы двигателя, но и скомпенсировать неравномерность вращения ротора как внутри одного оборота (из-за изменения плеча приложения электромагнитной силы), так и при изменении момента сопротивления на валу.
В данной работе представлены блок-схема системы управления бесколлекторным двигателем постоянного тока, а также принципиальные схемы микропроцессорного блока формирования управляющих сигналов и усилителя мощности и описан алгоритм программы прошивки микроконтроллера, обеспечивающий стабилизацию угловой скорости вращения ротора при изменении момента сопротивления на валу. В работе приводятся результаты испытания БДПТ с описанной системой стабилизации.
Принцип работы БДПТ с микропроцессорной системой управления
В двигателях постоянного тока коллекторный узел играет роль переключателя направления тока, протекающего в якорной обмотке, при прохождении ротором положения геометрической нейтрали. Геометрической нейтралью называют линию, которая проходит через центр якоря посередине между полюсами N и S системы возбуждения [1]. Следовательно, для создания бесколлекторного двигателя необходимо иметь информацию о положении ротора относительно этой нейтрали. Для получения этой информации используют датчики углового положения ротора. Наиболее распространены оптические, индуктивные и емкостные датчики.
Принцип действия оптического датчика основан на периодическом перекрытии оптического канала оптопары, закрепленной на статоре, непрозрачными областями растрового диска, укрепленного на роторе двигателя. На выходе фотоприемника оптопары формируется последовательность импульсов, частота следования которых пропорциональна скорости вращения ротора. Число импульсов несет информацию об угловом положении ротора. При этом положение геометрической нейтрали должно определяться по особой отметке на растровом диске. Сигнал с такого датчика является импульсным, т.е. содержит погрешность дискретизации.
Принцип действия простейших индуктивных датчиков основан на взаимодействии магнитного поля, создаваемого постоянным магнитом, укрепленным на роторе, с катушкой индуктивности, установленной на статоре. При вращении магнита в катушке наводит ся синусоидальная ЭДС, по фазовой характеристике которой можно судить об угловом положении ротора. Однако такие датчики громоздки и оказывают существенное влияние на распределение магнитных полей в магнитоэлектрической системе двигателя.
Емкостные датчики представляют собой два и более параллельных электрода, получаемых напылением метала на внутреннюю поверхность статора и на цилиндрическую поверхность ротора двигателя (рис. 2).
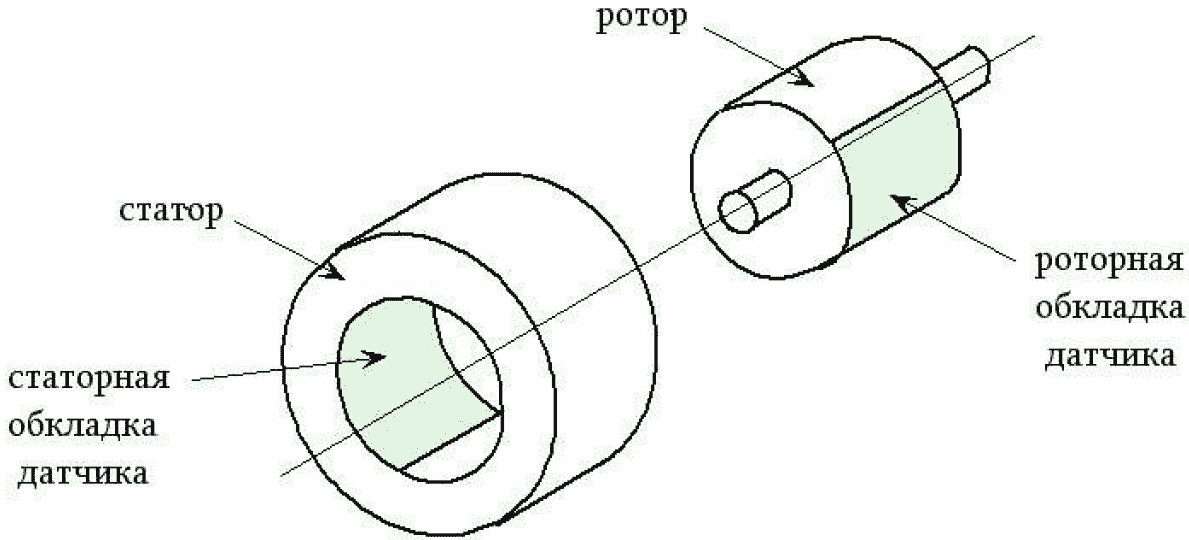
Таким образом, в конструкции двигателя формируется цилиндрический вращающийся конденсатор, емкость которого пропорциональна углу поворота ротора.
По сигналу, снимаемому с датчика угла поворота ротора, в момент прохождения якорной обмоткой геометрической нейтрали происходит переключение полярности напряжения, подаваемого на якорную обмотку (изменяется направление якорного тока).
Блок-схема БДПТизображена на рис 3.
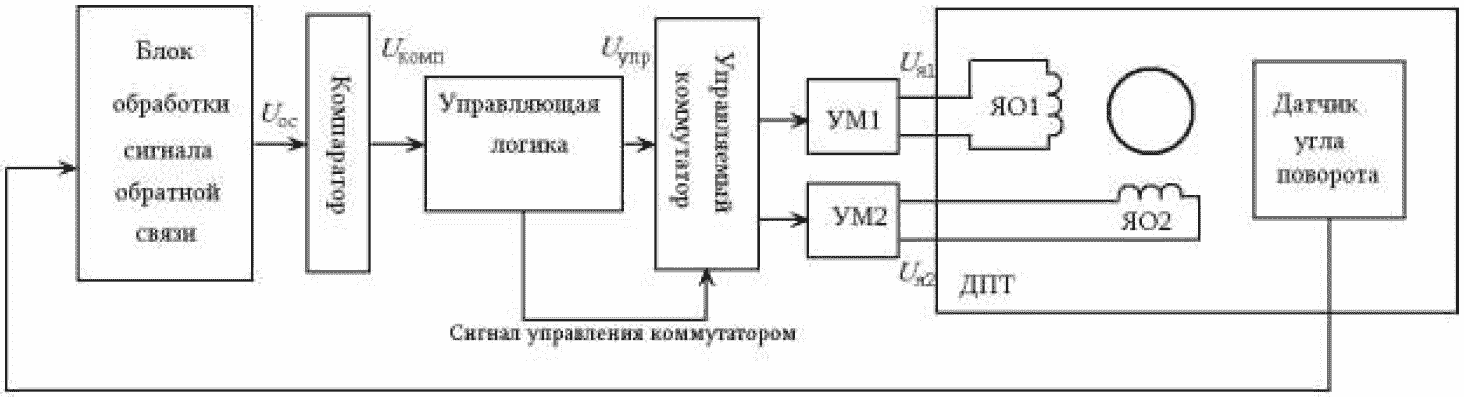
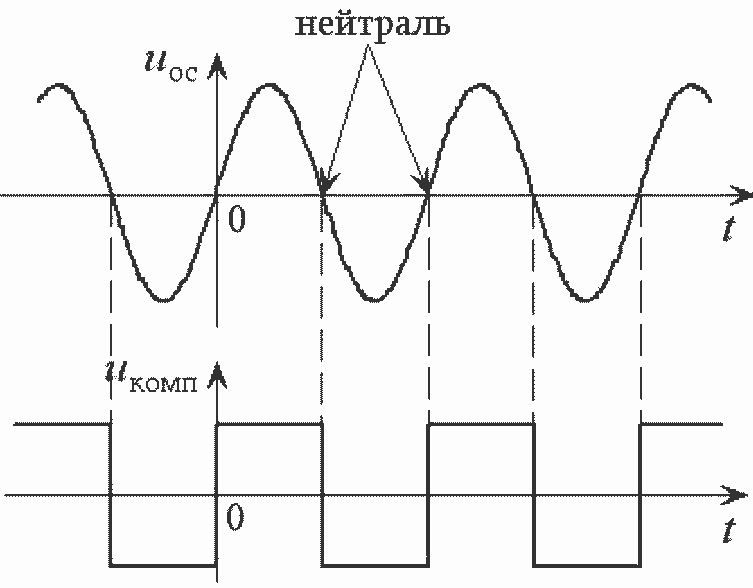
Блок обработки сигнала обратной связи (БОСОС) преобразует сигнал с датчика угла поворота ротора ДПТ в гармоническое напряжение (Uос), частота которого равна угловой скорости вращения ротора, а фаза – угловому положению ротора относительно геометрической нейтрали (рис. 4).
Компаратор (рис. 3) преобразует гармонический сигнал, поступающий с БОСОС (uос), в последовательность импульсов (uкомп), передний и задний фронты которого соответствуют моменту прохождения ротором положения нейтрали (рис. 4).
Блок управляющей логики формирует последовательность импульсов Uупр (рис. 3), которые распределяются управляемым коммутатором по входам усилителей мощности УМ1, УМ2. Выходные напряжения усилителей мощности Uя1, Uя2 подаются на якорные обмотки ЯО1 и ЯО2 двигателя постоянного тока.
Схема, реализующая подключение обмоток к источнику постоянного напряжения, изображена на рис. 5.
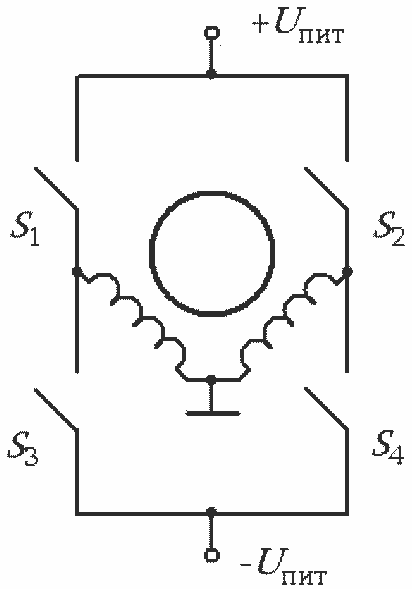
Последовательное замыкание (размыкание) электронных ключей S1-S4 обеспечивает работу двигателя в заданном режиме.
Функции управляющей логики и управляемого коммутатора можно возложить на микропроцессор, использование которого открывает огромные возможности по управлению БДПТ. С помощью микропроцессорного блока можно осуществлять изменение скорости вращения ротора в соответствии с заданным алгоритмом. Управление можно осуществлять с использованием внешних датчиков температуры, освещенности, положения и т.д. С помощью широтно-импульсной системы формирования напряжения якорных обмоток можно реализовать стабилизацию угловой скорости вращения ротора при изменении момента сопротивления на валу.
Принципиальная схема микропроцессорной системы управления БДПТ изображена на рис. 6.
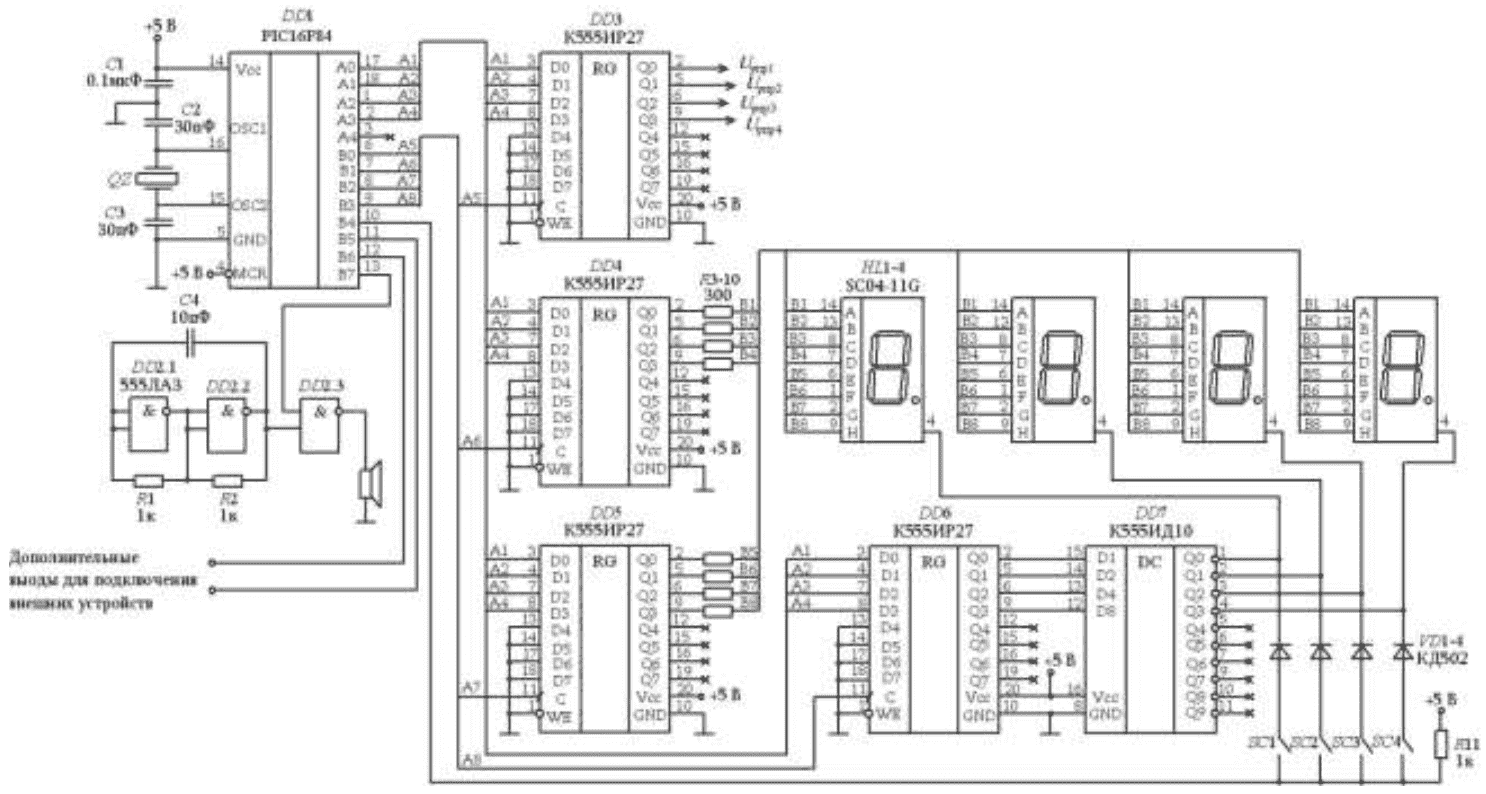
Микропроцессор PIC16F84 (DD1 рис. 6) имеет два программируемых порта ввода-вывода: PORTA и PORTB [6]. С помощью PORTA формируется четырехбитная шина данных (шина А1-4), а с помощью PORTB – шина адреса (шина А5-8). Кроме того, на вход процессора через PORTB подаются сигналы с клавиатуры SC1-SC4 (вход B4 PORTB) и сигналы обратной связи, снимаемые с датчика угла поворота ротора (входы B5, B6 PORTB). С выхода B7 PORTB осуществляется управление простейшим звуковым генератором, который собран на трех вентилях микросхемы DD2. Звуковой генератор удобно использовать для подтверждения нажатия кнопок клавиатуры и сигнализации аварийного режима работы двигателя. Тактовая частота работы процессора определяется номиналом кварцевого резонатора QZ.
С помощью регистров памяти DD4, DD5 и DD6 происходит управление системой индикации (четыре семисегментных светодиодных индикатора HL1-4) и клавиатурой SC1-SC4. Принцип осуществления динамической индикации и опроса клавиатуры подробно описан в статье «Универсальный микропроцессорный блок с открытыми каналами ввода- вывода» [6].
Управляющий сигнал, формируемый микропроцессором через регистр DD3 и усили- тель мощности (рис. 7), подается на обмотки двигателя.
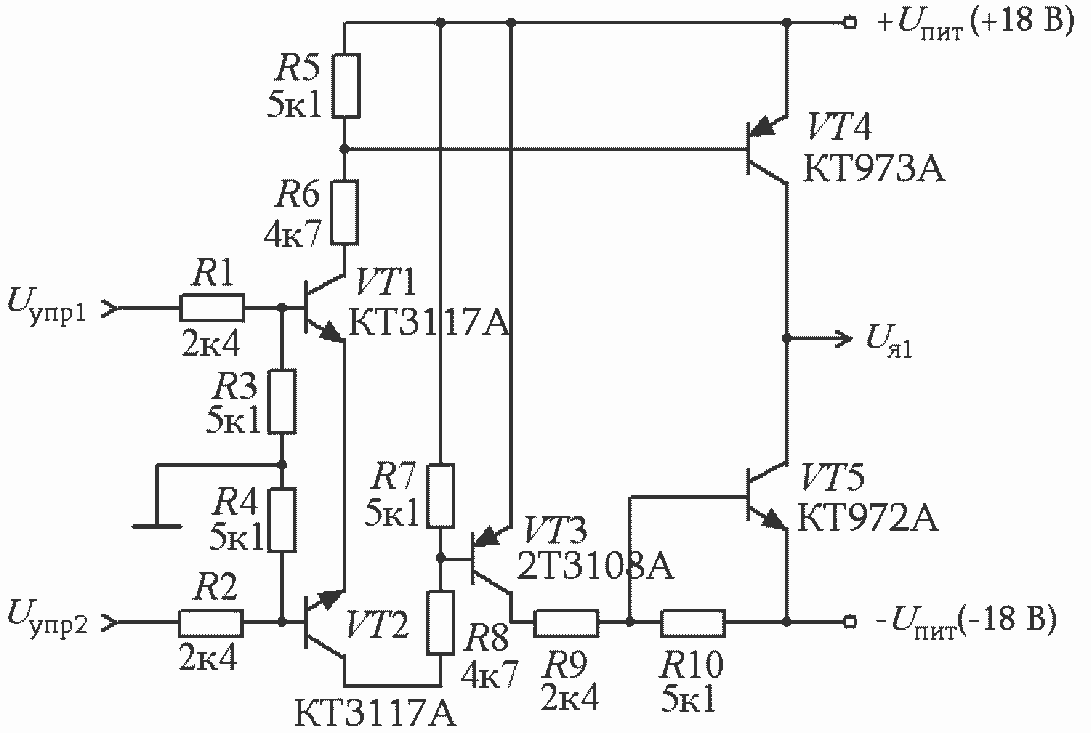
Усилитель мощности собран по трехкаскадной схеме на биполярных транзисторах, работающих в ключевом режиме. Выходной каскад представляет собой двухплечевой эмиттерный повторитель. Т.к. нагрузкой каскада являются низкоомные якорные обмотки двигателя и через них течет большой якорный ток, высокомощные транзисторы VT4 и VT5 необходимо устанавливать на радиатор. На рис. 7 показан один усилитель мощности, формирующий напряжение Uя1. Для управления второй якорной обмоткой, сдвинутой на 90° по отношению к первой, используется идентичный усилитель.
Временные диаграммы напряжений, формируемых системой управления двигателем изображены на рис. 8.
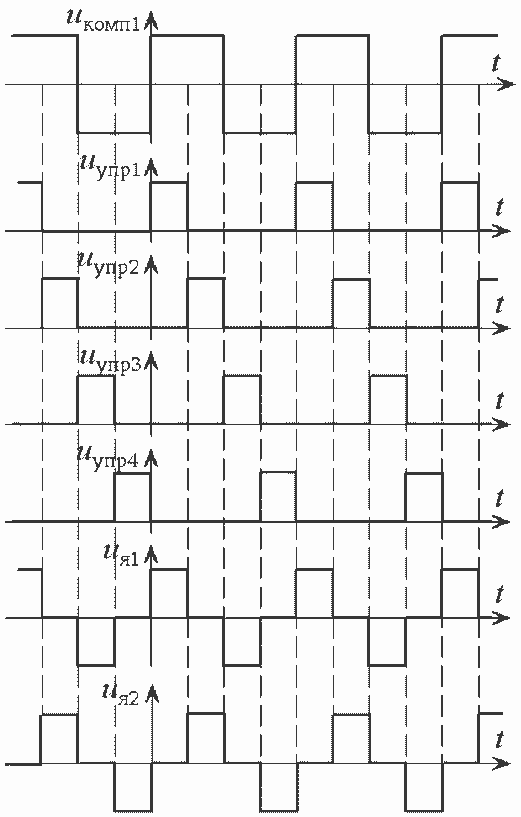
Для определения угла поворота ротора можно использовать двухканальный емкостной датчик, со выхода которого снимаются два синусоидальных напряжения, сдвинутые по фазе на 90°. Эти напряжения с помощью компараторов преобразуются в последовательность прямоугольных двхполярных импульсов (на рис. 8 показано только напряжение uкомп1). Период этих импульсов соответствует периоду вращения ротора двигателя. Эти сигналы поступают на входы микропроцессора B5, B6 PORTB (рис. 6). Микропроцессор формирует последовательность управляющих импульсов uупр1, uупр2, uупр3, uупр4, которые через усилители мощности подаются на якорные обмотки двигателя.
Таким образом, процессор обеспечивает выполнение следующих функций:
- обработка сигналов обратной связи и синтез управляющих импульсов по заданному алгоритму;
- опрос клавиатуры и принятие решения о коррекции алгоритма выработки управляющих импульсов (изменение заданной угловой скорости, изменение жесткости системы управления) в соответствии с результатами опроса;
- отображение необходимой информации на семисегментных светодиодных индикаторах (заданная угловая скорость, текущая угловая скорость, жесткость системы управления и т.д.);
- управление звуковым сигналом подтверждения нажатия кнопок клавиатуры.
Система стабилизации угловой скорости вращения ротора двигателя постоянного тока
Схема управления бесколлекторным двигателем постоянного тока с использованием PIC процессора позволяет путем формирования по заданному алгоритму сигналов, подаваемых на обмотки якоря, осуществлять следующие режимы работы двигателя: разгон двигателя, торможение двигателя, стабилизация угловой скорости вращения якоря, стабилизация момента, развиваемого двигателем, управление скоростью вращения по заданной программе.
Самым распространенным способом управления скоростью вращения двигателя является якорное управление, т.е. изменение величины напряжения, подаваемого на якорную обмотку. При использовании цифровой системы управления осуществить изменить напряжение на якорной обмотке можно либо с помощью цифроаналогового преобразователя (АЦП), либо с помощью широтно-импульсной модуляции (ШИМ) напряжений.
Рассмотрим работу системы управления угловой скоростью двигателя с использованием широтно-импульсной модуляции напряжений, подаваемых на якорные обмотки, которая является более дешевой по сравнению с системой на ЦАП и которая не требует работы усилителя мощности в линейном режиме. Работа транзисторов в ключевом режиме проще и менее энергозатратна.
Напряжение, подаваемое на якорную обмотку ДПТ (uя1), имеет вид прямоугольных импульсов (рис.9, диаграмма I).
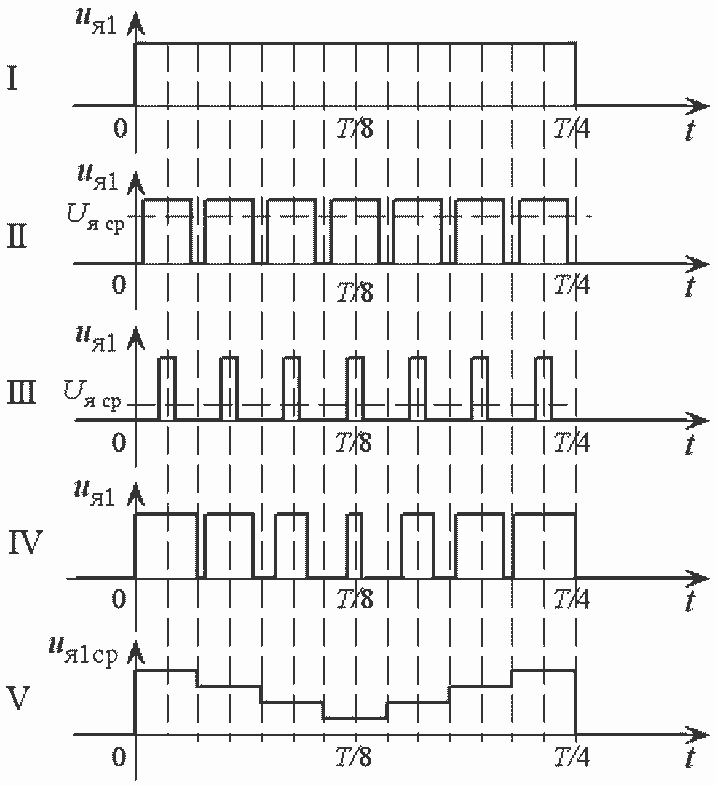
Разбивая четвертьпериодный интервал на n импульсов (на рис. 9 n = 7) и формируя ширину импульса в зависимости от поставленной задачи, можно добиться:
- снижения среднего значения напряжения Uя1. На рис. 9 диаграмма II Uяср = 3,75Um, на рис. 9 диаграмма III Uяср = 1,25Um;
- формирования среднего значения напряжения Uя1 по заданному закону, например, на рис. 9 диаграмма IV, V среднее значение Uяср имеет «провал» в середине четвертьпериодного импульса управления.
Для двигателей постоянного тока характерна нестабильность электромагнитного момента в пределах одного оборота двигателя. Возникает эта неприятность из-за изменения плеча приложения электромагнитной силы к ротору. График изменения момента изображен на рис. 10.
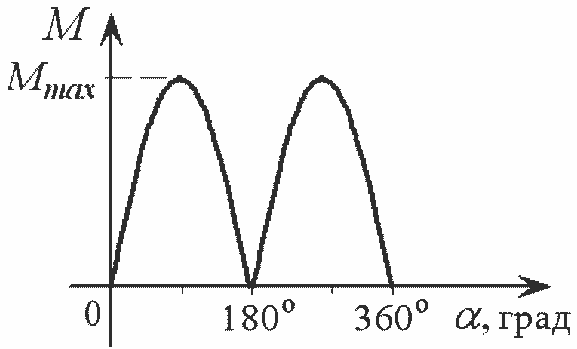
При вращении якоря с постоянной скоростью в момент прохождении положения геометрической нейтрали якорной обмоткой плечо приложения электромагнитной силы равно нулю, а при повороте на 90° момент максимален. Якорь ДПТ делают многообмоточным для сглаживания пульсаций момента, которые, кроме того, сглаживаются и за счет инерции ротора. Однако это только снижает, но не исключает пульсации момента, что существенно ограничивает возможность применения ДПТ с низким моментом инерции в прецизионных электромеханических системах.
Предлагаемая система управления ДПТ с использованием ШИМ позволяет компенсировать пульсацию момента внутри одного оборота ротора путем формирования напряжения Uя1 и Uя2 по заданному алгоритму.
Для стабилизации угловой скорости вращения ротора авторами была реализована предлагаемая система управления двигателем марки ДБМ-40 с емкостным двухканальным датчиком угла поворота ротора. В результате применения ШИМ при формировании напряжения, подаваемого на якорную обмотку, была получена механическая характеристика, изображенная на рис. 11.
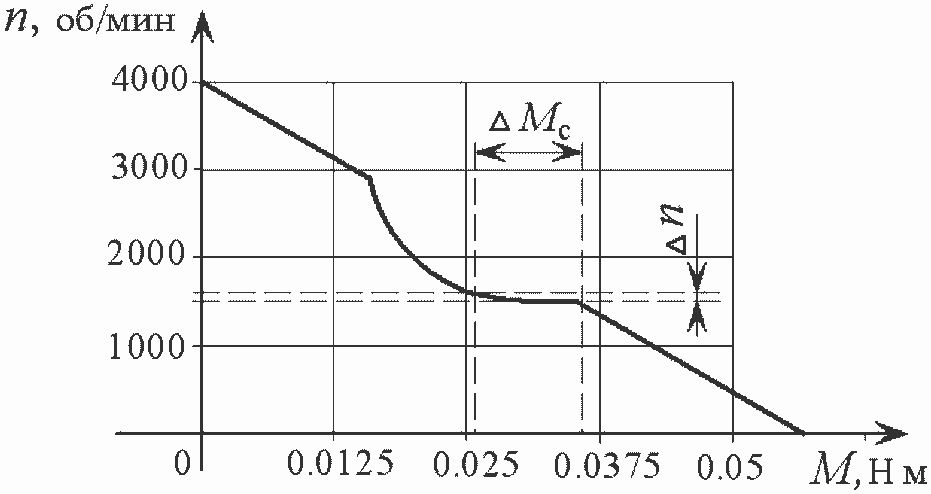
Стабилизация угловой скорости осуществляется с помощью широтно-импульсной модуляции напряжения, подаваемого на якорные обмотки двигателя. При увеличении момента сопротивления на валу двигателя и снижении угловой скорости вращения ротора микропроцессор формирует последовательность управляющих импульсов повышенной скважности Q = Tи/tи1 (рис. 9), т.е. повышается среднее значение амплитуды напряжения, подаваемого на якорную обмотку. При этом происходит увеличение якорного тока и, следовательно, электромагнитного момента, развиваемого двигателем. Скорость вращения ротора увеличивается.
При испытании двигателя ДБМ-40 были получены следующие результаты: при изменении момента сопротивления на валу на ΔMc = 0,1 Нм без использования системы стабилизации угловая скорость вращения ротора изменялась на Δn = 700об/мин, при использовании системы стабилизации изменялась на Δn = 100об/мин. При этом программно можно менять жесткость системы управления, и делать это можно в процессе работы двигателя с помощью клавиатуры и светодиодного табло.
Использование микропроцессора с клавиатурой и табло дает дополнительные возможности при работе системы управления без остановки и перепрограммирования процессора. Можно в реальном времени по заданному алгоритму менять угловую скорость вращения ротора, включать и отключать системы стабилизации скорости вращения и электромагнитного момента двигателя, на табло можно отображать реальное значение угловой скорости вращения ротора. Также на табло можно отображать режим работы двигателя, заданные параметры и отклонение реальных параметров от заданных.
Описание алгоритма работы системы стабилизации угловой скорости вращения ротора
Алгоритм работы микропроцессора включает в себя несколько этапов. На первом этапе производится программирование портов ввода-вывода, загрузка констант и начальных параметров режимов управления в регистры оперативной памяти процессора. После этого по сигналам обратной связи, снимаемым с датчика угла поворота ротора двигателя (входы В5, В6 процессора рис. 6), процессором формируются управляющие импульсы Uупр1, Uупр2, Uупр3, Uупр4, (рис. 8) таким образом, чтобы обеспечить максимальную скорость разгона двигателя (скважность Q = 1).
Последовательность фронтов импульсов, поступающих на входы В4, В5, соответствует четвертьпериодным отметкам при вращении двигателя. В момент прихода очередного фронта процессор производит расчет периода вращения якоря по показаниям внутреннего таймера и сравнивает его с заданным. При этом осуществляется съем информации с клавиатуры и при изменении первоначально заданных параметров, корректируются константы и режимы, записанные в оперативной памяти.
В момент, когда период вращения якоря достигает заданного значения, включается алгоритм стабилизации угловой скорости. Алгоритм работает следующим образом: измеренное значение периода вращения якоря сравнивается с заданным (записанным в регистре оперативной памяти); в зависимости от знака, величины рассогласования и заданной жесткости системы управления изменяется ширина управляющих импульсов (t1, рис. 9), подаваемых на обмотки возбуждения якоря таким образом, чтобы привести величину рассогласование к нулю.
При поступлении на вход микропроцессора заднего фронта четвертьпериодного импульса обратной связи процессор выводит значение измеренного и/или заданного периода вращения якоря на светодиодные индикаторы. Измерение периода осуществляется методом подсчета тактовых импульсов за каждые четверть периода вращения якоря двигателя.
Опрос клавиатуры производится с использованием системы прерывания по изменению сигнала на входе B4 PORTB микропроцессора (рис. 6).
Выводы
Предложенная схема системы управления двигателем постоянного тока имеет очень широкие возможности. С помощью широтно-импульсной модуляции напряжения, подаваемого на якорные обмотки, можно осуществлять разгон двигателя, торможение, управление угловой скоростью по заданной программе, а также осуществлять стабилизацию угловой скорости при изменении момента сопротивления на валу двигателя и компенсацию пульсации электромагнитного момента внутри одного оборота вращения ротора.
Дополнительное использование клавиатуры и индикаторного табло позволяет осуществлять изменение режима работы двигателя, параметров вращения, жесткости системы управления в процессе его работы и без перепрограммирования процессора. Использование индикаторного табло делает контроль за работой двигателя наглядным и комфортным.
Предлагаемая система управления была смакетирована и показала хорошие результаты при работе с двигателем ДБМ-40 и может быть рекомендована для использования в различных электромеханических системах и устройствах.
Список литературы:
- Шерстняков Ю.Г., Стрелков Б.В., Роднов Н.А. Основы электромеханики. Машины постоянного тока: Учебное пособие / М.: Изд-во МГТУ им Н.Э. Баумана, 2012. 47 c.
- Кацман М.М. Электрические машины: Учебник / М.: Высшая школа 2003 г. 464 c.
- Красовский А.Б. Основы электропривода: учебное пособие / М.: Изд-во МГТУ им. Н.Э. Баумана. 2015. 408 c.
- Масленникова С.И., Ситников А.В. Анализ ЭДС вращения магнитоэлектрического двигателя. Радиооптика. МГТУ им. Н.Э. Баумана. Электрон. журнал. 2015. № 6. C. 60- 71. DOI: 10.7463/rdopt.0615.0819162
- Пат. 2173931 РФ, МПК 7 Н02Р 6/06. Устройство автоматического управления бескол- лекторным двигателем постоянного тока / Ю.Т. Кукушкин, С.С. Николаев, Ю.Г. Шер- стняков. 2001, №26.
- Масленникова С.И., Ситников А.В., Ситников И.А.Универсальный микропроцессор- ный блок с открытыми каналами ввода-вывода. Радиооптика. МГТУ им. Н.Э. Баума- на. Электрон. журнал. 2015. № 3. DOI: 10.7463/rdopt.0215.0779481
- Ситников А.В. Электротехнические основы источников питания: Учебник / М.: Изд. центр «Академия», 2014. 240 c.
- Красовский А.Б. Способ повышения быстродействия шагового электропривода. Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журнал. 2013. № 9. C. 511-518. DOI: 10.7463/0913.0602179
- Кузовкин В.А. Теоретическая электротехника: Уч. пособие / М.: Логос, 2005. 480 с.
- Демирчян К.С., Нейман Л.Р., Коровкин Н.В., Чечурин В.Л. Теоретические основы электротехники: Учебник для вузов / СПб.: Питер, 2003. 575 p.
- Ажгиревич И.Л., Пущин А.В., Ситников А.В. Стенд для управления шаговым двига- телем. Инженерный вестник. МГТУ им. Н.Э. Баумана. Электрон. журнал. 2014. № 5. C. 501-509.
- Ситников А.В. Синтез системы управления шаговым двигателем. Инженер- ный вестник. МГТУ им. Н.Э. Баумана. Электрон. журнал 2014. № 10. С. 600-611.
- Баранов Е.Н., Ситников А.В. Дисковый вентильный электродвигатель с печатной об- моткой разомкнутого типа. Радиооптика. МГТУ им. Н.Э. Баумана. Электрон. журнал. 2015. № 3. С.42-50.
- Пат. 2176846 РФ, МГПС 7 Н02К 29/06. Индуктивный датчик положения ротора бес- коллекторного двигателя постоянного тока / Кукушкин Ю.Т., Николаев С.С., Шерст- няков Ю.Г. 2001, № 34.