Модель микропроцессорного управления двигателем постоянного тока для приводов робототехнических систем
Авторы: А.С. Бахчаев, В.В. Михайлов
Источник: Вестник науки Сибири – 2012 №4 (5) – с. 160-164
Аннотация
Показана возможность разработки системного решения задачиуправления двигателем постоянного тока при помощи микроконтроллера ATmega8 в диалоговом режиме с использованием человеко-машинного интерфейса.
Ключевые слова: Блок питания, микроконтроллер, алгоритм управления, тиристорный преобразователь.
В статье представлено системное решение, и описан алгоритм, позволяющий управлять скоростью вращения двигателя постоянного тока (ДПТ) при помощи микроконтроллера типа ATmega8.
Схема управления двигателем состоит из трех основных частей: стабилизированный блок питания, реверсивный тиристорный преобразователь и микроконтроллер ATmega8 [1, 2].
Питание цифровых схем управления осуществляется постоянными напряжениями +5 В и +12 В. Для получения необходимых номиналов используется стабилизированный блок питания [3, 4]. Схема блока питания представлена на рис. 1.
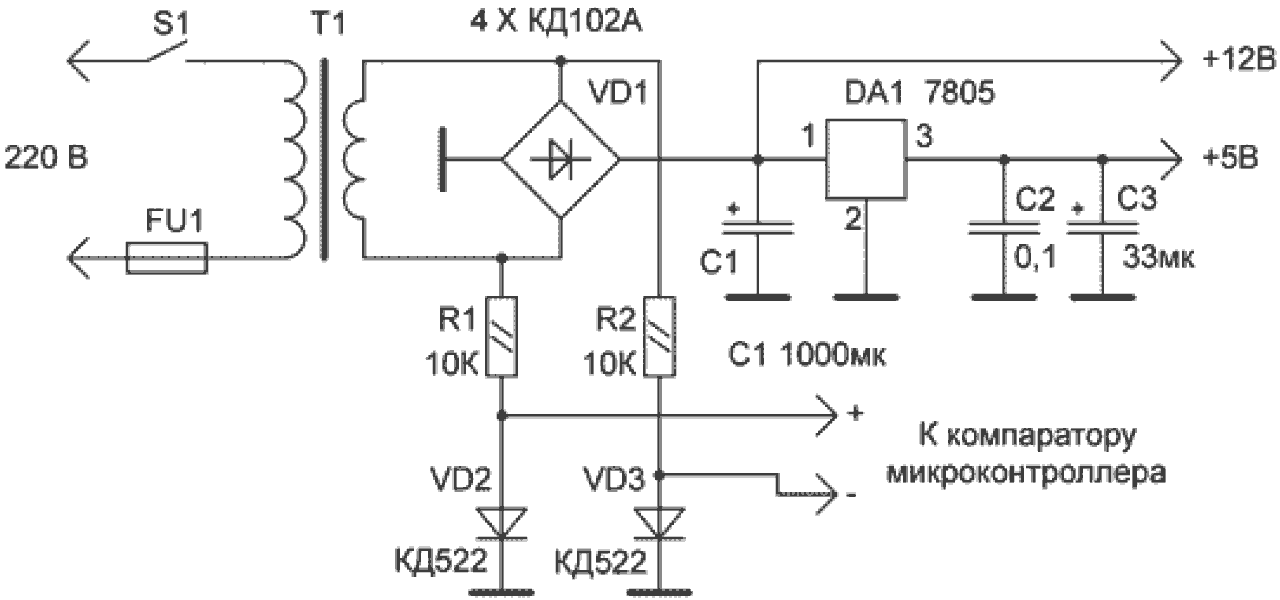
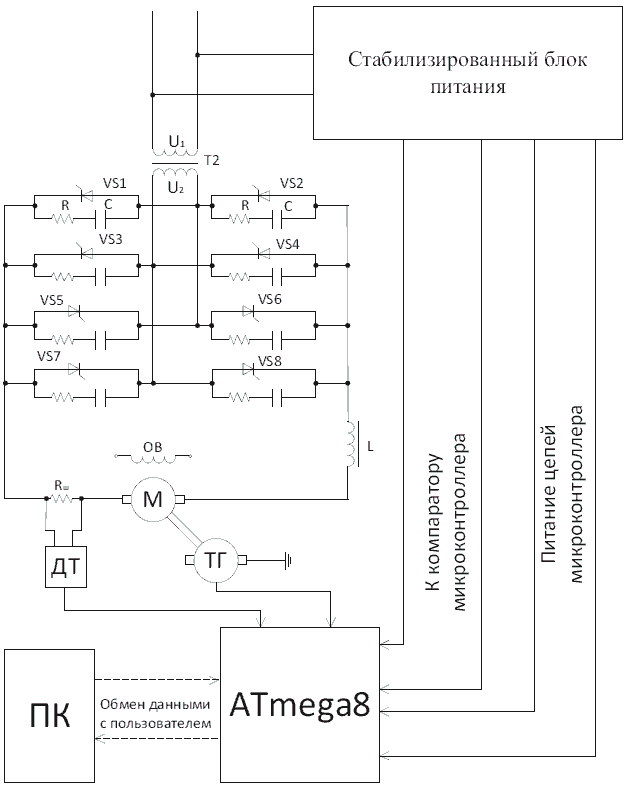
Схема управления скоростью вращения двигателя представлена на рис. 2.
Кроме собственно цепей питания приведенная схема содержит специальные цепи, позволяющие получать сигнал, синхронный с частотой сетевого напряжения. Такой сигнал при подаче на компаратор, входящий в состав микроконтроллера, позволяет реализовать алгоритмы управления тиристорными ключами для плавной регулировки мощности на нагрузке.
Реверсивный тиристорный преобразователь используется для регулирования мощности ДПТ. Он представляет собой мостовую схему из восьми тиристоров, которая позволяет изменять скорость вращения ДПТ как в прямом, так и в обратном направлении.
Для управления тиристорами была выбрана схема фазового регулирования [5], при помощи которой выбирается момент открытия тиристора относительно начала фазы текущего полупериода питающего напряжения. То есть мы искусственно создаем задержку открытия тиристоров с целью понижения выходного напряжения, что в свою очередь приводит к снижению мощности ДПТ, а значит и к снижению частоты вращения двигателя. Этот процесс иллюстрирует рис. 3.
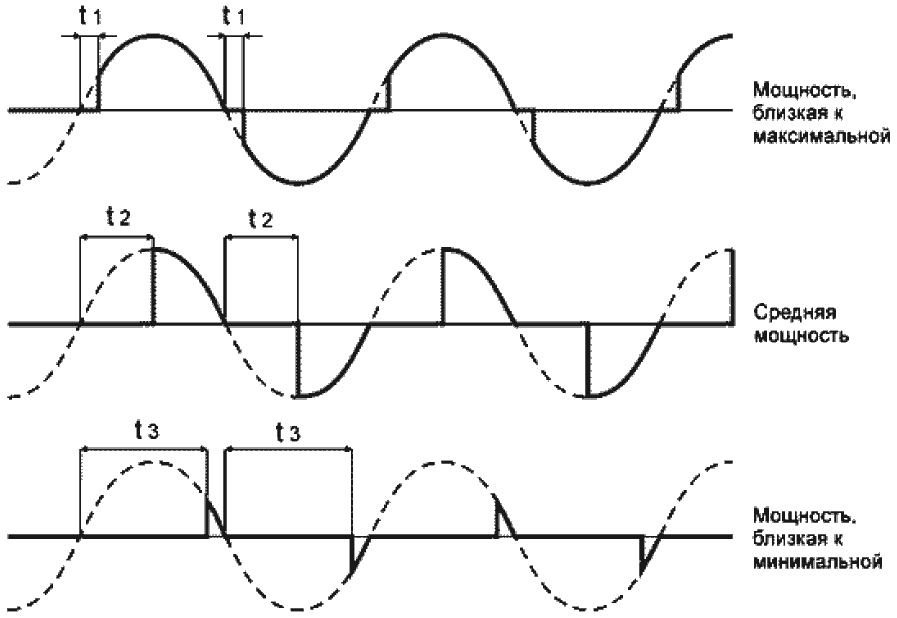
На рис. 3 приведена форма сигнала на нагрузке при разных значениях времени задержки. При малом времени задержки t1 мощность максимальна. При t2 в нагрузку отдается ровно половина возможной мощности, а при t3 мощность минимальна.
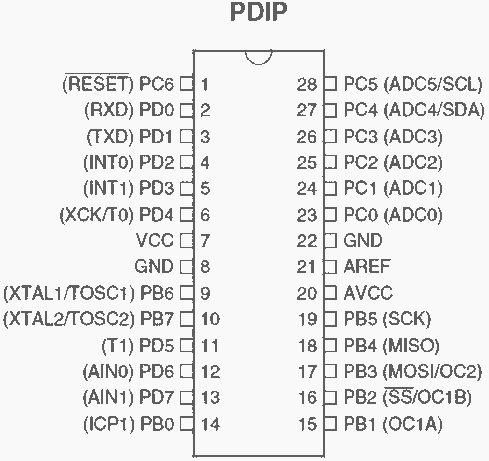
Управляющая часть схемы состоит из микроконтроллера и персонального компьютера. Для управления двигателем был выбран микроконтроллер фирмы ATMEL: ATmega8. По количеству портов ввода-вывода, а также по параметрам своей вычислительной мощности данный микроконтроллер подходит для схемы управления ДПТ. Схема микроконтроллера представлена на рис. 4.
Микроконтроллер необходим для исполнения следующих задач:
- Фиксация времени начала нового полупериода. Фиксация происходит при помощи аналогового компаратора, который имеется в составе ATmega8.
- Обеспечение заданной задержки. Для реализации заданной задержки используется внутренний таймер микроконтроллера.
- Выдача управляющего импульса для открытия тиристорных преобразователей.
- Прием данных от датчиков обратной связи и передача их на экран пользователя.
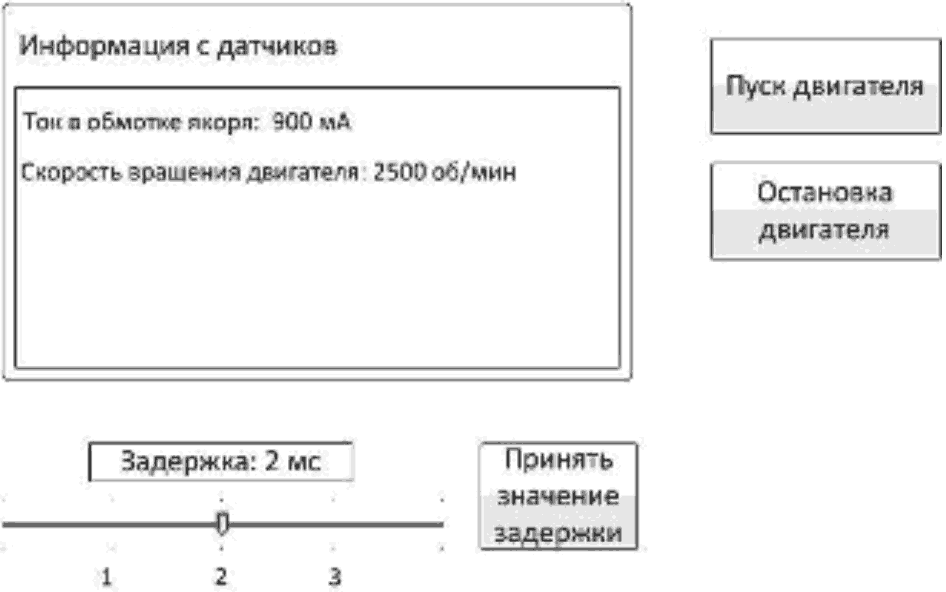
Персональный компьютер содержит в себе управляющую программу, при помощи которой пользователь может управлять двигателем. Примерный вид интерфейса программы для ввода данных представлен на рис. 5.
Интерфейс содержит две кнопки для пуска и остановки двигателя, бегунок для изменения времени задержки открытия тиристорного преобразователя и кнопку для ввода информации о задержке в микроконтроллер. Также программа содержит информационное окно, в котором отображается информация с датчиков, а именно скорость вращения двигателя и ток якоря.
При помощи персонального компьютера через управляющую программу вводится управляющая информация в контроллер, далее работа идёт в диалоговом режиме.
При работе в диалоговом режиме пользователь задает величину длительности задержки открытия тиристора. Введенная информация поступает в микроконтроллер. Дождавшись сигнала с компаратора о начале нового полупериода, контроллер запускает внутренний таймер (длительность работы таймера равна длительности задержки, заданной пользователем). По окончании работы таймера контроллер формирует управляющий сигнал, который через оптопару подается на управляющие входы тиристоров. Тиристоры открываются, и напряжение поступает на двигатель, тот в свою очередь начинает вращение. Как только сетевое напряжение достигнет нуля, тиристоры закроются, а с началом следующего полупериода процесс отсчета времени повторится снова. Изменяя величину задержки, пользователь может изменять мощность, а значит и скорость вращения двигателя. Так же пользователь имеет возможность наблюдать за показателями работы двигателя, а именно за скоростью вращения двигателя и за током в обмотке якоря. Это позволяет удаленно следить за работой ДПТ.
Список литературы:
- Москаленко В.В. Электрический привод. – М.: Издательский центр «Академия», 2005. – 368 с.
- Терехов В.М., Осипов О.И. Системы управления электроприводов: учебник для высш. учеб. заведений. – М.: Издательский центр «Академия», 2005. – 304 с.
- Розанов Ю.К. Силовая электроника. – М.: Издательский дом МЭИ, 2007. – 632 с.
- Зиновьев Г.С. Основы силовой электроники. – Новосибирск: Изд-во НГТУ, 2003. – 523 с.
- Денисенко В.В. Тиристоры: вопросы реализации // Современные технологии автоматизации. – 2008. – № 1. – с. 72–80.