Рисунок 1 – Адаптивное управление эталонными образцами, применяемое для управления ошибками по положению двигателя постоянного тока
Автор: S.D. Kraft, Edward T. Wall
Перевел: Золотов Е.Ю.
Источник:Experimental microprocessor-based adaptive control system
Процедура проектирования для оптимального положения системы контроля хорошо задокументирована для случаев в котором известны параметры установки, известные как константы, и результирующая система является временно инвариантной. Такие системы имеют очень предсказуемые эксплуатационные характеристики, которые устанавливаются как теоретически, так и экспериментально на протяжении многих лет.
Один недостаток такого типа системы дизайн очень очевидный в любом приложении в котором параметры установки или нагрузочные характеристики могут меняться в зависимости от чувствительности к окружающей среде, износу компонентов или изменений нагрузки в течении работы. Поскольку оптимальность существует только для постоянных значений постоянных параметров предполагаемый в первоначальной конструкции контроллера, любые изменения или неопределенность в этих значениях параметров обычно приводит к потере оптимальной производительности системы.
Более широкий класс управления положением, проблемы могут быть решены с помощью метода самообучения контроллера, который может компенсировать изменения параметров или неопределенности в установке, таким образом постоянно действовать, чтобы поддерживать оптимальную производительность системы.
В настоящее время проводится большое количество исследований в области контроля микропроцессорами промышленных систем. В частности, приложения, требующие адаптивного управления, стратегии набирают популярность как темы для этой области исследований. Чтобы точно оценить возможности и ограничения конкретных адаптивных конструкций контроллера, необходимо создать рабочую систему, которую можно детально изучать в лаборатории.
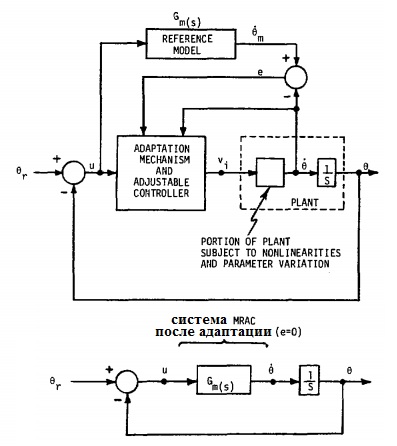
Адаптивное управление моделью (MRAC) была выбрана в качестве основы для адаптивного дизайна контроллера в этом проекте, потому что он позволяет точно определить желаемый оптимальный динамический отклик системы в виде линейной эталонной модели. Эта эталонная модель является частью общей системы MRAC, работающая параллельно с контролируемой установки в условиях реального времени.
Основная концепция системы MRAC, применяемая к этой проблеме управления положением двигателя постоянного тока, иллюстрируется блок-схемой Pисунок 1. Функции адаптивного механизма путем гашения в регулируемом контроллере, делает комбинированный контроллер и установку динамическими, сопоставляя с динамикой линейной эталонной модели. Во время работы адаптивный механизм (адаптивный управляющий закон) постоянно действует, чтобы управлять ошибкой состояния e до нуля.
Рисунок 1 – Адаптивное управление эталонными образцами, применяемое для управления ошибками по положению двигателя постоянного тока
Вывод закона об адаптивном управлении основанный на устойчивости Ляпунова. Результирующая непрерывная адаптивная конструкция контроллера была преобразована в дискретно-временную форму для прямой реализации на микропроцессорном контроллере. Полное адаптивное положение дискретизированных данных, модель системы управления показана на Pисунке 2.
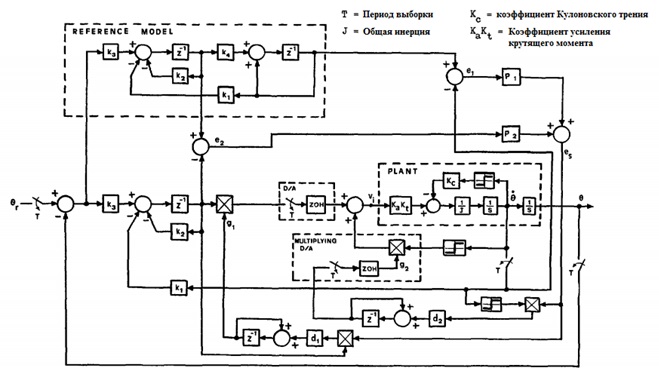
Рисунок 2 – Полная модель адаптивной системы управления положением
Адаптивная компенсация изменений инерции нагрузки достигается посредством регулируемого усиления g. Адаптивные контрольные коэффициенты dl и d2 определяют время реакции адаптации системы.
Чтобы реально оценить производительность системы адаптивного управления, был разработан фактический цифровой контроллер, встроенный для управления двигателем постоянного тока в режиме реального времени. Полученный микропроцессор основан на цифровом контроллере – выполненный в одноплатном дизайне, включающий в себя все аппаратное и программное обеспечение необходимое для выполнения операций выборки, преобразований A/D и D/A, а также арифметические операции алгоритма контроллера показанный на Pисунке 2.
Одноплатный контроллер предназначенный для этого приложения, использует микропроцессор INS8073 от National Semiconductor и обеспечивает 8 Кбайт оперативной памяти для операционной системы и переменное хранилище. 10-битный AID-конвертер и четыре мультиплексированных аналоговых входа обеспечивающие выборку положения, скорости и различные входные сигналы. Положение определяется потенциометром, преобразователь скорости представляет собой аналоговый тахометр. Один из двух 10-разрядных D/A преобразователей используются для обеспечения выходного аналогового сигнала контроллера на амплитуду усилителя мощности, который управляет двигателем постоянного тока.
8-разрядный усилитель D/A используется в адаптивной петле для компенсации трения. INS8073 имеет внутренний интерпретатор BASIC и последовательный порт YO, который обеспечивает простой пользовательский интерфейс для ввода или изменения управляющего параметра со стандартного терминала.
Написано программное обеспечение пользовательского интерфейса в BASIC и алгоритм адаптивного контроллера написанное на ассемблере с плавающей запятой. Существуют положения для мониторинга в реальном времени любого внутреннего контроллера используя запасной 10-разрядный ЦАП.
1. Y.D. Landau, Adaptive Control: The Model Reference Approach
, New York, NY: Marcel Dekker, Inc., 1979.
2. K.S. Narendra and R.V. Monopoli, Application of Adaptive Control
, New York, NY: Academic Press, Inc., 1980.
3. S.D. Kraft, Design and Evaluation of a Microprocessor-Based Adaptive DC Motor Position Control System
, Masters Thesis, University of Colorado at Denver, Department of Electrical Engineering and Computer Science, 1984.