Введение
В наши дни микропроцессорная техника является важнейшим средством при решении различных задач в области САУ. Микропроцессорная техника все более востребована в таких областях как военная отрасль, техника, промышленность, сельское хозяйство и др. Большинство систем, обладающих высокой функциональной сложностью, реализуются на микропроцессорных устройствах. С помощью микропроцессоров возможно создание сложных алгоритмов управления, которые невозможно реализовать аналоговым способом.
Благодаря микропроцессорной технике в САУ широкое применение нашли цифровые ПИД-регуляторы. В настоящее время ПИД-регуляторы широко распространены в промышленности и различных технических отраслях. Примерно 90-95% регуляторов, эксплуатируемых в настоящее время, используют ПИД-закон управления. Причинами столь высокой популярности являются простота построения и промышленного использования, ясность функционирования, пригодность для решения большинства задач и низкая стоимость [1].
1. Структурная схема системы. Составление математического описания двигателя постоянного тока независимого возбуждения
Структурная схема представляет собой следящую САУ. В данном случае следящая САУ построена по принципу подчиненного регулирования, т.е. с вложенными друг в друга контурами. Регулятор каждого контура выполняет функцию последовательного корректирующего устройства. Регулятор второго контура вырабатывает задающее воздействие для первого контура. Первый контур – скоростной, второй – угловой.
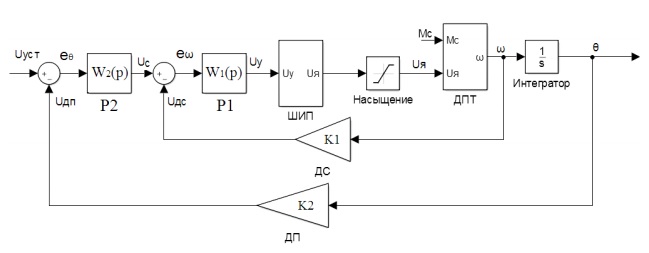
Рисунок 1 – Структурная схема САУ
Примечание – наличие звена насыщения обусловлено конечной величиной питающего напряжения ШИП.
На вход САУ подается напряжение уставки Uуст, которое соответствуетопределенному углу поворота вала двигателя. Сигнал с выхода датчика положения Uдп сравнивается с напряжением уставки и формируется сигнал ошибки по углу eΘ. Под действием eΘ регулятор 2 вырабатывает сигнал регулирования скорости Uc. Сигнал регулирования скорости сравнивается с сигналом с выхода датчика скорости и формируется сигнал ошибки по скорости eω. Под действием eω регулятор 1 формирует управляющий сигнал ШИП Uy. Управляющий сигнал воздействует на ШИП, который вырабатывает напряжение, поступающее в цепь якоря двигателя. Вследствие чего происходит поворот вала двигателя на заданный угол. Отработка сигнала уставки осуществляется под действием внешнего возмущения, в виде момента сопротивления Mc, возникающего в произвольный момент времени.
Двигатель является основным элементом САУ и в наибольшей степени определяет ее динамические свойства. Правильный выбор двигателя позволяет спроектировать электропривод, способный успешно решать поставленные задачи, удовлетворяющий перечисленным выше требованиям технического задания [2].
В работе в качестве объекта управления рассматривается двигатель постоянного тока (ДПТ) независимого возбуждения (НВ) – наиболее распространенный тип двигателя работающего на постоянном токе. При рассмотрении его математического описания будем считать, что размагничивающее действие реакции якоря скомпенсировано, а индуктивность якорной цепи постоянна [3]. Возбуждение двигателя – электромагнитное, т.е. в качестве индуктора выступает электромагнит. При этом магнитный поток возбуждения двигателя считается постоянным. Это значит, что обмотка возбуждения подключена к источнику постоянного напряжения заранее. Все ПП в обмотке завершились, и поток возбуждения достиг своего установившегося номинального значения. Это объясняется тем, что в автоматическом приводе в основном используется якорное управление, более того, все большее применение находят двигатели с возбуждением от постоянных магнитов [2].
Упрощенная схема замещения двигателя представлена на Pисунке 2, где обозначено: Я – якорь, И – индуктор, в качестве которого выступает обмотка возбуждения с сердечником из электротехнической стали, uя – напряжение, подводимое к обмотке якоря, iя – ток якоря, uв – напряжение, подводимое к обмотке возбуждения, iв – ток, протекающий по обмотке возбуждения, Ф – магнитный поток возбуждения.
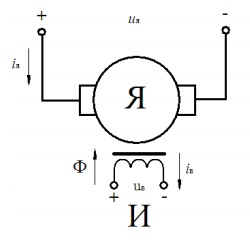
Рисунок 2 – Упрощенная схема замещения двигателя
Для описания основных процессов и динамических свойств двигателя используется система уравнений (1.1) [4], построенная в соответствии с упрощениями.
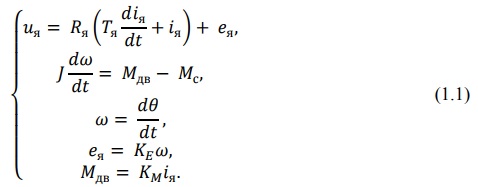
где Rя – активное сопротивление обмотки якоря; Tя – электромагнитная постоянная якоря; eя – противоЭДС якоря; J – момент инерции якоря; ω – механическая угловая скорость; Mдв – электромагнитный момент двигателя; Θ – механический угол поворота вала; KE – конструктивный коэффициент ЭДС;??KM – конструктивный коэффициент момента.
Примечание. Конструктивные коэффициенты учитывают значение магнитного потока, который имеет постоянное значение.
Система (1.1) состоит из уравнения якорной цепи, уравнения вращения якоря, уравнения противоЭДС якоря и уравнения электромагнитного момента двигателя. Все эти уравнения выводятся исходя из основных законов электричества, электромагнетизма и законов динамики вращательного движения.
Структурная схема двигателя, построенная в соответствии с системой уравнений (1.1), представлена на Pисунке 3.
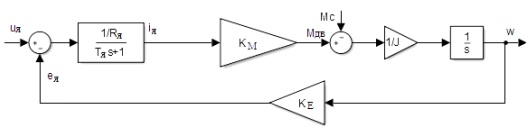
Рисунок 3 – Структурная схема двигателя без числовых значений
Список использованных источников
1. Виктор Д. ПИД-регуляторы: принципы построения и модификации // В
записную книжку инженера. 2006. N4. С.66-74.
2. Электромеханические свойства двигателей постоянного тока
[Электронный ресурс] – URL: http://epla.susu.ru/glv_020.htm(дата обращения:
18.04.2016).
3. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление
электроприводами. – Л.: Энергоиздат, 1982. – 392с
4. Герман-Галкин С.Г. Matlab&Simulink. Проектирование мехатронных
систем на ПК. – СПБ.: КОРОНА-Век, 2008. – 368 с