Введение
В современных системах автоматического регулирования в качестве исполнительного элемента часто используют двигатели постоянного тока (ДПТ), главными достоинствами которых являются высокое быстродействие, большой пусковой момент, линейная регулировочная характеристика. Кроме того, двигатели постоянного тока с возбуждением от постоянных магнитов более технологичны, чем двигатели со статорными обмотками и следовательно, имеют меньшую себестоимость.
Однако ряд существенных недостатков ограничивает область применения ДПТ. Наличие щеточно-коллекторного узла приводит к повышенному уровню радиопомех, снижает надежность двигателя, увеличивает его себестоимость, делает невозможным применение ДПТ во взрывоопасной среде. Кроме того, электромагнитный момент, развиваемый двигателем, зависит от угла поворота якоря относительно положения геометрической нейтрали, что приводит к нестабильности угловой скорости вращения ротора внутри одного оборота.
Принцип работы БДПТ с микропроцессорной системой управления
В двигателях постоянного тока коллекторный узел играет роль переключателя направления тока, протекающего в якорной обмотке, при прохождении ротором положения геометрической нейтрали. Геометрической нейтралью называют линию, которая проходит через центр якоря посередине между полюсами N и S системы возбуждения [1]. Следовательно, для создания бесколлекторного двигателя необходимо иметь информацию о положении ротора относительно этой нейтрали. Для получения этой информации используют датчики углового положения ротора. Наиболее распространены оптические, индуктивные и емкостные датчики.
Принцип действия оптического датчика основан на периодическом перекрытии оптического канала оптопары, закрепленной на статоре, непрозрачными областями растрового диска, укрепленного на роторе двигателя. На выходе фотоприемника оптопары формируется последовательность импульсов, частота следования которых пропорциональна скорости вращения ротора. Число импульсов несет информацию об угловом положении ротора. При этом положение геометрической нейтрали должно определяться по особой отметке на растровом диске. Сигнал с такого датчика является импульсным, т.е. содержит погрешность дискретизации.
По сигналу, снимаемому с датчика угла поворота ротора, в момент прохождения якорной обмоткой геометрической нейтрали происходит переключение полярности напряжения, подаваемого на якорную обмотку (изменяется направление якорного тока).
Блок-схема БДПТ изображена на Pисунке 1
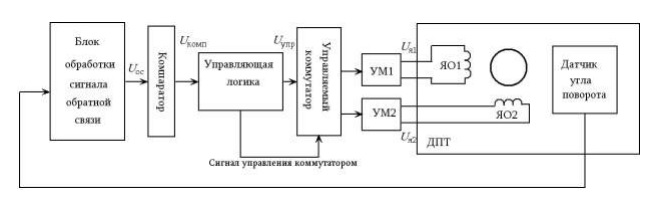
Рисунок 1 – Блок-схема БДПТ
Блок обработки сигнала обратной связи (БОСОС) преобразует сигнал с датчика угла поворота ротора ДПТ в гармоническое напряжение (Uос), частота которого равна угловой скорости вращения ротора, а фаза – угловому положению ротора относительно геометрической нейтрали (Рисунок 2).
Компаратор (Рисунок 1) преобразует гармонический сигнал, поступающий с БОСОС (Uос), в последовательность импульсов (Uкомп), передний и задний фронты которого соответствуют моменту прохождения ротором положения нейтрали (Рисунок 2).
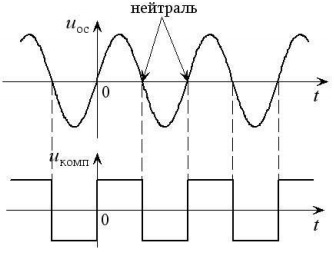
Рисунок 2 – Временные диаграммы напряжений
Блок управляющей логики формирует последовательность импульсов (Рисунок 1), которые распределяются управляемым коммутатором по входам усилителей мощности УМ1, УМ2. Выходные напряжения усилителей мощности Uя1, Uя2 подаются на якорные обмотки ЯО1 и ЯО2 двигателя постоянного тока.
Схема, реализующая подключение обмоток к источнику постоянного напряжения, изображена на Рисунке 3.
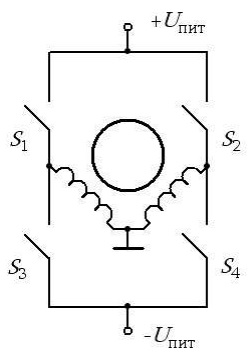
Рисунок 3 – Схема подключения якорных обмоток
Последовательное замыкание (размыкание) электронных ключей S1-S4 обеспечивает работу двигателя в заданном режиме.
Функции управляющей логики и управляемого коммутатора можно возложить на микропроцессор, использование которого открывает огромные возможности по управлению БДПТ. С помощью микропроцессорного блока можно осуществлять изменение скорости вращения ротора в соответствии с заданным алгоритмом. Управление можно осуществлять с использованием внешних датчиков температуры, освещенности, положения и т.д. С помощью широтно-импульсной системы формирования напряжения якорных обмоток можно реализовать стабилизацию угловой скорости вращения ротора при изменении момента сопротивления на валу.
Список использованных источников
1. Шерстняков Ю.Г., Стрелков Б.В., Роднов Н.А. Основы электромеханики. Машины
постоянного тока: Учебное пособие / М.: Изд-во МГТУ им Н.Э. Баумана, 2012. 47 c
2. Кацман М.М. Электрические машины: Учебник / М.: Высшая школа 2003 г. 464 c
3. Красовский А.Б. Основы электропривода: учебное пособие / М.: Изд-во МГТУ им.
Н.Э. Баумана. 2015. 408 c.
4. Ситников А.В. Электротехнические основы источников питания: Учебник / М.: Изд.
центр «Академия», 2014. 240 c.