Для привода стабилизации угла крена модуля коррекции необходимо иметь исполнительный элемент создающий момент, который компенсируетвнешние возмущающие моменты и способный вращать стабилизируемую частьв противоположную вращению объектасторону стребуемымискоростями и ускорениями. В качестве такого исполнительного элемента предлагается использовать двухфазный бесконтактныймоментный двигатель типа ДБМ с микропроцессорной системой управления(МПСУ).
Разрабатываемая система управления должна выполнять следующие основные задачи:
- формирование управляющих напряжений на обмотках исполнительного двигателя;
- обработка сигналов с датчика положения ротора;
- обработка сигналов с датчиков тока в обмотках двигателя;
- обмен данными с внешними блоками.
Исходя из перечисленных задач и требований к производительности вычислительного блока, в качестве основы для МПСУ был выбран микроконтроллер семейства STM32, который ориентирован на использование в качестве вычислительного устройства цифрового
электропривода с различными современными типами исполнительных двигателей и имеет специальные периферийные устройства (быстродействующее АЦП, интерфейс подключения квадратурного энкодера, интерфейс датчиков Холла, 3х-фазные ШИМ-таймеры с мертвым временем
и возможностью совместной работы),а также оснащ?н всеми необходимыми интерфейсами связи.
Функциональная схема разработанной МПСУ представлена на Pисунке 1
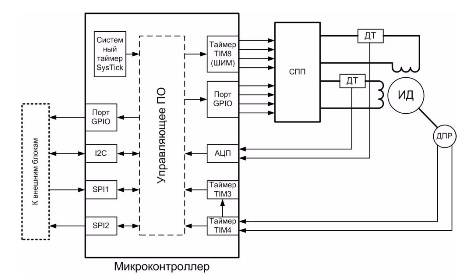
Рисунок 1 – Функциональная схема МПСУ. (СПП – силовой полупроводниковый преобразователь, ДТ – датчик тока, ИД – исполнительный двигатель, ДПР – датчик положения ротора)
Микроконтроллер формирует ШИМ сигналы в обмотках двигателя с помощью силового полупроводникового преобразователя (СПП), который состоит из двух одинаковых частей, каждая из которых управляет одной фазой двигателя и состоит из:
- опторазвязки для изоляции информационной и силовой частей схемы МПСУ;
- двух полумостовых драйверов для управления силовыми ключами;
- четыр?х силовых ключей (MOSFET-транзисторов), объединенных в мостовую схему.
Таким образом, СПП позволяет сформировать напряжение любой полярности и скважности на обмотках исполнительного двигателя.
Особенность формирования ШИМ сигналов в рассматриваемом приводе заключается в том, что в процессе его работы не должно возникать такого состояния ключей, при котором обмотка двигателя закорочена, т.е. режима рекуперативного торможения, т.к. это привед?т к возникновению дополнительного момента торможения между статором и ротором двигателя, а,следовательно,к дополнительным колебаниям стабилизируемой части.
Для формирования управляющего напряжения на обмотках двигателя используется датчик положения ротора,состоящий из диска (Рисунок 2а) с 8 прорезями (по числу пар полюсов ротора двигателя) и двух инфракрасных оптопар, установленных друг относительно друга со смещением в 11,25 градуса (Рисунок 2б).
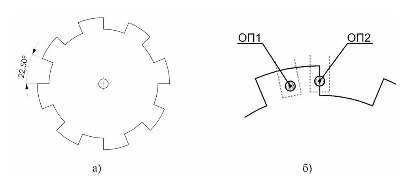
Рисунок 2 – Фотоимпульсный датчик положения ротора (ОП – оптопара).
Т.е. ДПР представляет собой двухразрядный абсолютный энкодер, позволяющий формировать на обмотках напряжения прямоугольной формы (Рисунок 3а).
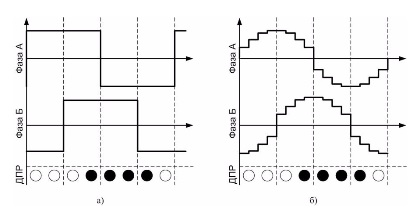
Рисунок 3 – Форма напряженийна обмотках двигателя.
Однако питание напряжениями прямоугольной формы приводит к значительным пульсациям тока, а, следовательно, момента, на средних и высоких частотах вращения. В идеальном случае, чтобы избежать таких пульсаций, напряжения на обмотках должны иметь синусоидальную форму. В реальной же цифровой системе синусоидальный сигнал обычно зада?тся ступенчатой функцией с фиксированным числом значений на период. Дискретность описанного выше датчика позволяет получить только четыре значения на период, поэтому в системе примен?н алгоритм, задействующий дополнительный таймер, который, используя измеренную текущую скорость вращения и состояние ДПР, формирует промежуточные значения напряжения на обмотках, доводя, таким образом, число значений функции синуса до 16 на период (Рисунок 3б).
Как видно из графиков (Рисунок 4), полученных в результате моделирования в системе Matlab,питание фаз двигателя напряжением синусоидальной формы с 16 значениями на период (Рисунок 4б) позволяет существенно снизить колебания момента по сравнению с прямоугольной формой питающих напряжений (Рисунок 4а).
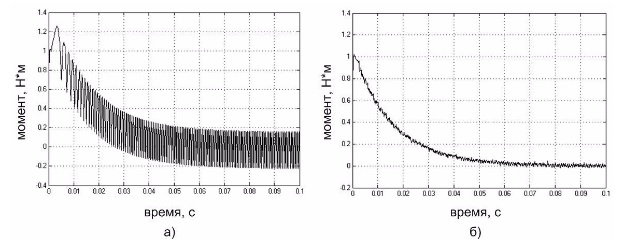
Рисунок 4 – Переходный процесс по моменту при питании фаз двигателя прямоугольными (а) и синусоидальными (б) напряжениями.
Т.к. в реальной системе значение скорости получается за сч?т измерения интервалов времени между событиями в ДПР, то данный метод формирования синусоидальных напряжений нельзя использовать при пуске двигателя, а также при малых скоростях вращения из-за ограниченной разрядности измеряющего таймера. Поэтому в разработанном приводе был примен?н комбинированный способ формирования напряжений на обмотках двигателя, который заключается в использовании прямоугольной формы напряжения при пуске и начальном разгоне двигателя и переходе на синусоидальные напряжения при достижении определ?нной частоты вращения.
Таким образом, разработана микропроцессорная система управления приводом стабилизации модуля коррекции вращающегося по крену объекта, использующая достаточно простые и над?жные датчики и способная выполнять поставленные задачи.
Список использованных источников
1. Фираго Б.И., Павляк Л.Б. Регулируемые электроприводы переменного тока. – Минск: Техноперспектива, 2006. – 363 с.
2. Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. – СПб.: КОРОНА-Век, 2008. – 368 с