Ключевые слова
Крановые рельсы, привод, система управления, система привода, стабилизация положения.
Аннтоация
В этом документе представлена конструкция монорельсовой платформы с дистанционным управлением, которая в зависимости от оборудования позволяет проводить осмотр и техническое обслуживание различных рельсов кранов. Трехколесная система управления с магнитными приводными колесами обеспечивает непрерывный контакт платформы с верхней поверхностью головки рельса. Гибкая система направляющих роликов обеспечивает четкое позиционирование платформы относительно боковой поверхности головки. Источником питания для движителя и устройств, размещенных на платформе, являются две батареи, работающие попеременно. Передача системы дистанционного управления (проводной или беспроводной) с контроллером платформы осуществляется через многофункциональное электрическое соединение. Компактная конструкция платформы позволяет эффективно выполнять различные виды работ на крановых рельсах как на земле, так и на высотных сооружениях.
Введение
Постоянно развивающиеся мехатронные системы, связанные со строительством и использованием дистанционно управляемых транспортных средств, обеспечивают поддержку или замену непосредственного участия человека в громоздких трудностях и ситуациях, которые могут поставить под угрозу здоровье человека или жизнь. Автомобили с дистанционным управлением используются все чаще, например, «Огненный истребитель», который предназначен для нейтрализации опасных веществ [1] или роботов, контролирующих зоны пожара [2]. Специализированные транспортные платформы используются в процессах исследований и сертификации в области технической безопасности [3] и пожарной безопасности [4].
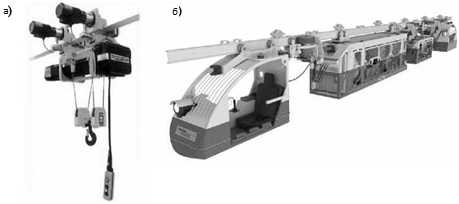
Отдельной группой являются железнодорожные транспортные средства и оборудование, в которые включены монорельсовые транспортные средства. Что касается расположения перевозимых объектов по отношению к рельсу, то имеются две группы: подвесные и напольные. Подвесные транспортные средства обычно используются во внутренних системах транспорта для перевозки людей и товаров и межоперационного транспорта в конкретных условиях (рис.1).
Рисунок 1. Подвесные транспортные средства: а) монорельсовая подвесная лебедка, б) подвесная железная дорога для перевозки людей и материалов в шахтах [4].
Портальные транспортные средства используются в условиях с ограниченным пространством для размещения транспортного рельса непосредственно на плоской поверхности или опорной конструкции (Рисунок 2).

Рис.2. Мост монорельса [5].
Отличительной особенностью большинства конструкций рельсов является то, что ширина рельса в несколько раз превышает его высоту, что обеспечивает стабильность при управлении автомобилем в различных параметрах движения. Существенная проблема возникает в ограниченном пространстве над ногами узкой дорожки с головкой, на которой движется автомобиль. Этот случай является отличительным признаком для следов кранов, в которых отношение ширины к ширине головы составляет около 2.
Проект по созданию мобильной платформы с монорельсовым управлением в качестве носителя разработанной системы был разработан в рамках реализации международного проекта Программа "Eureka E! 8819/INROSY" «Комплексная система аудита для отслеживания дорожек и ремонта рельсов и колес кранов».
1. Концепция мобильной платформы
Развитию концепции для мобильных платформ предшествовал подробный анализ существующих исследований и практических решений для монорельсовых транспортных средств, например, устройство, показанное на рисунке 3 [6].

Рисунок 3. Самоходное устройство для системного управления геометрией дорожек крана [6].
В связи с этим важным критерием является мобильность устройства, заключающаяся в возможности его установки на рельсах разного размера, установленных как на уровне земли, так и на опорах на значительной высоте.
Таким образом, критерий, определяемый таким образом, ограничивает вес и размеры платформы. Предполагается, что платформа будет размещена на рельсе одним человеком, и она сможет перемещаться по крановым рельсам номинального размера (ширина головы) от 45 до 100 мм (рис. 4).

4. Размеры рельсов крана [7].
Разработанная концепция предполагает, что платформа будет расположена на верхней поверхности и боковых поверхностях головки рельса (рис.5).
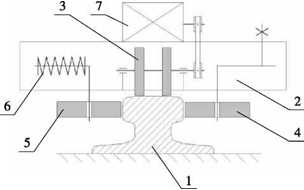
Рисунок 5. Схема мобильной платформы: 1 - рельс, 2 - корпус платформы, 3 - приводные колеса, 4 - позиционные колеса, 5 - прижимные колеса, 6 - пружинный элемент и 7 - привод.
Колеса сохраняют структуру на рельсе и позволяют перемещаться вдоль рельсов. В горизонтальной плоскости размещение платформы относительно оси рельса определяется с помощью регулировочных колец. Нажимные колеса, установленные напротив позиционирующих колес, обеспечивают постоянный контакт с боковой поверхностью рельса. Поверхность верхней платформы предназначена для дистанционного управления (проводного или беспроводного) и дополнительного оборудования для сервисного обслуживания или железнодорожного крана. Источником питания для платформы и оборудования, размещенного на ней, являются аккумуляторы, которые являются их неотъемлемой частью. Для управления движением платформы на рельсе имеется вращающийся импульсный преобразователь, соединенный с системой привода.
2.Структура платформы
Основываясь на принятой концепции, была разработана платформа виртуальной модели (рис.6), которая включает в себя три основных функциональных компонента: приводной блок 2, систему стабилизации поперечной устойчивости 3 и силовой модуль 4.

3D-модель платформы: 1 - корпус, 2 - элементы привода, 3 - боковая система стабилизации и 4 - компоненты энергосистемы.
Трехколесный привод отвечает за размещение соответствующей платформы на верхней поверхности головки рельса, перемещение платформы вдоль рельсов и идентификацию положения платформы относительно рельса (рис. 7). Ведущие колеса (1) и колеса свободного хода (2) сохраняют конструкцию на рельсе и обеспечивают независимое движение вдоль дорожки. Два приводных колеса (1) представляют собой магнитные колеса, обеспечивающие хорошую адгезию к поверхности следовых точек присутствия загрязняющих веществ, смазочных материалов или поверхностных консервантов, которые вызывают снижение коэффициента трения. Ведущие колеса (1) приводятся в действие редукторным двигателем (3) с синхронной ленточной передачей (4). Колесо свободного хода (2), покрытое нескользящим слоем, соединено с датчиком вращательного импульса (5), который передает системе управления информацию о текущем местоположении платформы. Компоненты привода, встроенные в отдельные пазы (6) , защищены крышками (7) от внешних воздействий .
Правильное положение платформы относительно плоскости симметрии рельсов (с точки зрения ее функций) обеспечивается боковой системой стабилизации (рис.7).

Рисунок 7. Поперечное сечение платформы: 1 - направляющий ролик, 2 - прижимной ролик, 3 - пружинный, 4 - роликовый, 5 - направляющий роликовый кронштейн, 6 - кронштейн нажимного ролика, 7 - блокировочный винт, 8 - доска со шкалой, 9 - регулировочный винт, 10 - крышка и 11 - ограничивающий винт.
В горизонтальной плоскости платформа размещается с двумя регулируемыми роликами (1), положение которых может регулироваться и определяться в зависимости от ширины рельсов, чтобы платформа была ориентирована по рельсам. Два прижимных ролика (2) прижимаются к рельсу с помощью пружины (3) и обеспечивают непрерывный контакт регулируемых роликов со стороной головки рельса. Таким образом, платформа с установленным на ней оборудованием неравномерно размещена на верхней и боковой поверхностях головки рельса. Ролики (1 и 2) расположены на осях (4), встроенных в скользящие скобы (5 и 6). Регулирующие ролики и кронштейны нажимных роликов направляются в прямоугольные каналы корпуса таким образом, что оси регулировки и давления ролики остаются вертикальными, несмотря на то, что боковые нагрузки воздействуют на них во время движения платформы. Опора ролика имеет два резьбовых отверстия. В вертикальной апертуре имеется винт (7), который вместе с прямоугольной пластиной (8) предназначен для фиксации положения кронштейна. Изменение положения опоры (5), которое влечет за собой изменение положения регулируемого ролика (1), происходит, когда винт (7) ослабляется в результате поворота винта (9) с восьмиугольным гнездом с шестнадцатеричной клавишей, введенной через отверстие в крышке (10). Положение кронштейна (5) с роликом (1) контролируется на шкале, на которой имеются индикаторы положений, соответствующих ширине тангажа для крановых рельсов. Кронштейн (6) или прижимной ролик (2) состоит из двух частей, соединенных вместе в виде скольжения, между которыми имеется пружина (3) давления, которая толкает подвижную часть кронштейна (6) с помощью ролика (2) в направлении от tra ck. Движение ролика (2) в направлении рельса ограничено с помощью винта (11). Стационарная часть кронштейна (6) может быть перемещена и зафиксирована с помощью винтов так же, как и другой кронштейн (5). Установка кронштейна в положении, соответствующем ширине рельса, приводит к соответствующему давлению со стороны роликов (2) на боковых направляющих, что является оптимальным с точки зрения направления платформы.
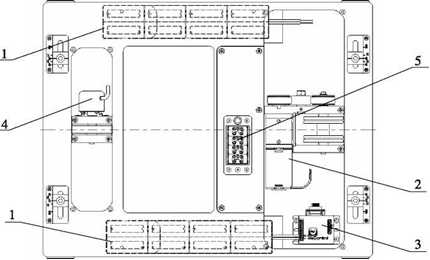
Рисунок 8. Вид платформы с элементами силовой системы: 1 - аккумулятор, 2 - редукторный двигатель, 3 - управление, 4 - энкодер и 5 - стыковочный разъем.
Модуль питания для платформы (рис.9) состоит из набора батарей (1) для мощности двигателя (2) через управление (3) и других модулей для измерительных, контрольных и радио модулей, размещенных на платформе в различных конфигурациях. Чтобы максимально снизить центр тяжести относительно поверхности верхней головки рельса, батареи размещаются симметрично относительно оси платформы в двух боковых карманах, что обеспечивает легкий доступ во время работы. Правильно выбранная емкость аккумулятора позволяет автономно работать в течение двух часов с потребляемой мощностью до 10 А. Для передачи электроэнергии управляющие сигналы, включая управление импульсами двигателя и энкодера (4) для модулей, установленных на платформе, устанавливают электрический стыковочный соединитель (5) для быстрого и определенного выполнения соединения.
Верхняя плоская поверхность конструкции платформы предназначена для дополнительной установки оборудования, выполняющего определенные функции измерения и обслуживания.
Прототип монорельсовой мобильной платформы
На основе проверенной трехмерной модели были разработаны полные технические спецификации с особым акцентом на технологию изготовления корпуса платформы. Тонкостенная конструкция ячейки для жесткости с малым весом r вырабатывает технологию, которая минимизирует возможность деформации в результате удаления большого (более 70%) объема материала во время обработки.Прототип мобильной платформы (рис.10), выпущенной в "ITeE" – "PIB" в Радоме(ред.город) характеризуется следующими параметрами:
Размеры (длина / ширина / высота) 525/412/98 мм
Вес 15 кг
Тип рельса от А45 до А100
Номинальная скорость 0.2 м/с
Источник питания 2x24В; 2.5Ач
Потребление электроэнергии max10А
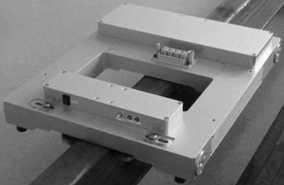
Рисунок 9. Вид мобильной платформы монорельса
Прототип монорельсовой мобильной платформы прошел процедуру для исследовательских прототипов и узлов технического оборудования в Институте [9, 10]. Исследование не только подтвердило предполагаемые функциональные параметры, но и прогнозирует способность их поддерживать во время работы.
Подробные исследования касались главным образом двух компонентов, которые имеют приоритет для функционирования платформы: привод и стабилизатор положения относительно рельсов (рис. 10).

Рисунок 10. Вид монорельсовой подвижной платформы, расположенной на рельсе A65: l - рельс, 2 - приводные колеса, и 3 - поперечно-стабилизирующие ролики.
Как результат исследования, были сделаны изменения в геометрии приводных колес, взаимодействующих с поверхностью головки рельса. Введенное регулирование состояло в том, чтобы выкрутить ведущие колеса относительно оси вращения, чтобы увеличить расстояние между точками контакта колеса с направляющей. Эта настройка привела к улучшению боковой устойчивости движения платформы на одной направляющей, которая была проверена с помощью инклинометра, построенного на рельсе.
Выводы
Пульт дистанционного управления, мобильная монорельсовая платформа обеспечивает средства для проверки или обслуживания в зависимости от оборудования крановых рельсов разного размера. Трехколесная система обеспечивает непрерывный контакт платформы с верхней поверхностью головки рельса. Применение основных приводных колес обеспечивает отличную адгезию к поверхности дорожки независимо от наличия загрязняющих веществ, смазочных материалов или поверхностных консервантов, что приводит к снижению коэффициента трения. Гибкая система направляющих роликов обеспечивает безупречное позиционирование платформы относительно боковой поверхности головки. Источником питания для движителя и устройств, размещенных на платформе, являются две батареи, работающие попеременно. Компактный дизайн платформы позволяет эффективно использовать ее в различные виды работ по крановым рельсам, расположенным как на земле, так и на верхние конструкции.