Авторы: Guojun Pan, Yan Ren and Jian Ruan
Автор перевода: А.А. Жильцов
Источник (англ.): Shock and Vibration Volume 2015 (2015), Article ID 590203, 9 pages // URL: http://dx.doi.org/10.1155/2015/590203
РЕЗОНАНСНЫЙ АНАЛИЗ ВЫСОКОЧАСТОТНОГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ВОЗБУДИТЕЛЯ, УПРАВЛЯЕМОГО ДВУМЕРНЫМ КЛАПАНОМ
Аннотация
Резонансная характеристика гидравлической системы еще не описана, поскольку она обязательно ограничена линейными предположениями в классической теории жидкости. Представлен способ резонансного анализа для электрогидравлического возбудителя, управляемого 2D-клапаном. Структурная схема этой системы возбуждения устанавливается путем извлечения нелинейных частей из традиционного анализа линеаризации; в результате получается резонансная частота. Согласно входной энергии от источника масла, которая равна обратной энергии источнику масла, давление нагрузки и поток нагрузки решаются аналитически, так как рабочая частота достигает собственной частоты. Аналитическое выражение резонансного пика также выводится без затухания. Наконец, экспериментальная система построена для проверки теоретического анализа. Первоначальное исследование резонансной характеристики заложит теоретическую основу и станет полезным дополнением к резонансным явлениям классической теории жидкости в гидравлической системе.
1. Введение
Утомляемость материалов или рост трещин - явление, обычно встречающееся в практике машиностроения [1, 2]. Таким образом, испытание на усталость становится важным и разумным средством объективного определения характеристик механического продукта, работающего в условиях вибрации [3]. В последнее время повышенное внимание уделяется испытаниям на усталость при высоких циклах. В военно-воздушной базе Райт Паттерсон был разработан электродинамический шейкер для изучения высокочастотных характеристик, рабочая частота которых составляет от 350 Гц до 600 Гц в зависимости от самой системы. И магнитострикционный материал в качестве исполнительного механизма используется в электромагнитном возбудителе, чтобы рабочая частота составляла около 2 кГц [4]. В Юго-западном научно-исследовательском институте в новом возбудителе используется пьезоэлектрический драйвер для увеличения полосы частот в широких масштабах. Рабочая частота, как функция образца и захвата, может быть достигнута около 2 кГц, но она ограничена резонансной точкой [5]. Вибрирующая среда создается искусственно возбудителем, который управляется механической мощностью, электрической мощностью или гидравлической мощностью [6]. Однако в случае большой мощности обычно используется электрогидравлический возбудитель. Электрогидравлический возбудитель разработан MTS специально для испытаний на усталость при высоких циклах [7]. Он управляется двухступенчатым сервоклапаном. Хотя рабочая частота значительно улучшена, пропускная способность ограничена из-за структуры заслонки сопла. Поэтому в электрогидравлическом возбудителе, разработанном корпорацией MTS, используется речевой клапан с более высокой скоростью потока и частотной характеристикой. Эта система интегрирована для тестирования эластомерных материалов и тестирования роста трещин в Мичиганском технологическом университете. Эта рабочая частота возбудителя увеличена (1000 Гц или выше), но для работы с речевой катушкой требуется дополнительное охлаждающее устройство для снижения температуры в условиях высокой токовой рабочей среды. Трехступенчатый сервоклапан производится Rexroth [8]. Он имеет лучший динамический отклик, чем структура форсунки-заслонки, но полоса большого потока клапана составляет около 200 Гц. В дополнение к проектированию нового электромеханического трансформатора и двухступенчатой или трехступенчатой структуры сервоклапана, новые элементы управления были поставлены на замену сервоклапана, используемого в электрогидравлическом возбудителе. Хао и Чжан [9] использовали вращающийся клапан в возбудителе для повышения частоты колебаний. Управляя этим поворотным клапаном, катушка будет совершать возвратно-поступательное движение, чтобы переключать скорость потока под давлением в камеры цилиндра или двигателя в качестве альтернативы, и, таким образом, вибрация создается на поршень цилиндра и подключенная нагрузка. Но амплитуда колебаний преобладала под давлением масла и, следовательно, имела низкую точность, и контроль смещения был затруднен.
Гидравлический возбудитель сильно сдерживается динамическими характеристиками сервоклапана, что затрудняет повышение рабочей частоты до очень высокого уровня. Поэтому предлагается новая схема электрогидравлического возбудителя, управляемая двумерным клапаном, для достижения более высокой частоты. Частоту и амплитуду синусоидальной вибрационной волны отдельно контролируют путем кругового вращения и осевого скольжения катушки соответственно [10]. Но взаимосвязь частоты колебаний и амплитуд является взаимной связью; реальных данных мало. Поэтому перспективным решением является увеличение рабочей частоты до собственной частоты гидравлической системы. Когда частота возбужденных колебаний приближается к собственной частоте, возникает резонанс и может значительно увеличить амплитуду колебаний. Этот гидравлический резонанс будет исследован и обсужден с помощью теоретического анализа и экспериментальной системы, и, наконец, будут сделаны некоторые выводы.
2. Принцип работы
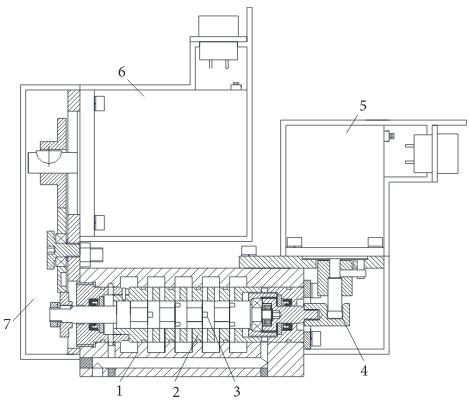
2D-клапан, как необходимый элемент управления, используется в высокочастотном электрогидравлическом возбудителе из-за специальной конструкции этого клапана. 2D-клапан имеет две степени свободы, вращательные и скользящие движения катушки. Такая структура не только срабатывает двухступенчатый клапан с пилотным каскадом и прямой обратной связью по положению, но также значительно улучшает возбужденную частоту за счет увеличения скорости вращения катушки. Катушка непрерывно вращается с помощью электродвигателя и комбинации зубчатых колес и перемещается эксцентриковым механизмом, приводимым в движение другими электродвигателями, как показано на рисунке 1.
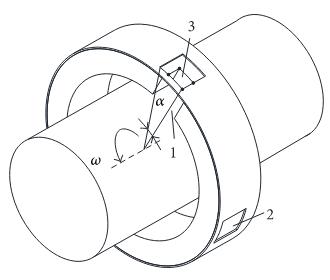
Вращение двухканальной золотниковой катушки может создавать альтернативно измененную область порта клапана, которая образована между канавками на земле шпули и прямоугольными окнами на рукаве. Существует ряд канавок, симметрично расположенных на катушках (центральный угол каждой канавки равен α), скоординированный с окнами, распределенными равномерно на втулке, которые создают попеременно измененную
область порта клапана, как показано на рисунке 2. Затем геометрически, канавка имеет разность углов 2α по отношению к одной на любых двух смежных плечах. Такая компоновка вызовет форму волны с фазовым углом 180° между впускным клапаном и отверстием клапана. Разнообразная область порта клапана зависит от скорости вращения и осевого скольжения катушки. Следовательно, электрогидравлический вибратор, управляемый 2D-клапаном, мог понимать, что частота и амплитуда колебаний доминируют, соответственно, скоростью вращения и смещением катушки 2D-клапана.
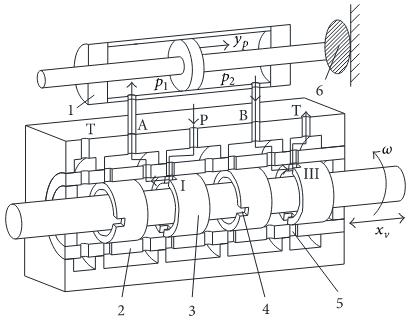
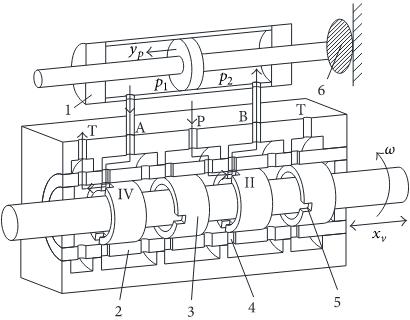
Комбинация двумерного клапана и поршня выбирается как гидравлический элемент питания для создания возвратно-поступательного движения. Одной из камер цилиндра регулирования давления управляет гидравлический мост, образованный с помощью измерительных входов и измерительных выходов альтернативно различным клапанным портам. Другая камера представляет собой гидравлический мост с разностью фазового угла на 180°. Когда золотник двумерного клапана совершает вращательное движение, давление внутри двух камер цилиндра будет изменяться в качестве альтернативы, чтобы поршень производил возвратно-поступательные колебания как показано на рисунках 3(a) и 3(b). Очевидно, что получить высокочастотную вибрацию легко, улучшив скорость вращения катушки. Рабочая частота также связана с количеством канавок на одной земле шпули и шаблоном сцепления между канавками на земле золотника и окнами на рукаве. Однако это достигается ценой жертвования величиной 2D-диафрагмы, которая определяет амплитуду вибрации. Поэтому в высокочастотном сечении возбужденная амплитуда будет в значительной степени ограничена.
 (a)
(a)
 (b)
(b)
3. Резонансные характеристики
Резонансный принцип гидравлической жидкости и механической системы полностью различен, поскольку элементы механического резонанса, включая массу, демпфирование и пружину, являются взаимозависимыми, а их значимость очень слаба. Однако элементы гидравлического резонанса, состоящие из пружины, демпфирования и силы потока, практически выполнены с помощью средств передачи мощности потока, за исключением массы. Эта гидравлическая среда, которая является рабочей жидкостью, действует не только как сила, приводящая к колебанию цикла поршня, но также и центрирующая пружина жесткости является функцией смещения поршня и вступает в силу как вязкое демпфирование из-за пути утечки, действующего на увеличить затухание. Поэтому этот гидравлический резонанс выйдет со своеобразным резонансным явлением и теоретическими результатами.
3.1. Резонансный процесс
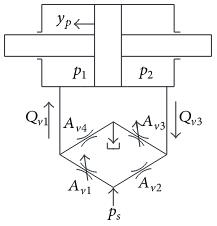
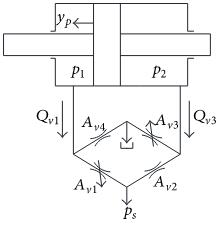
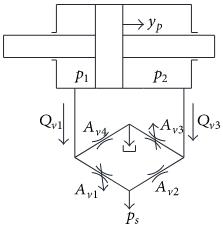
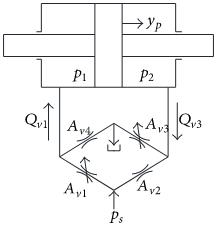
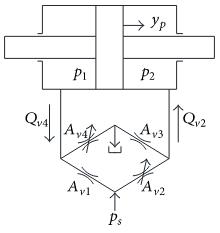
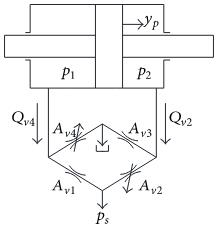
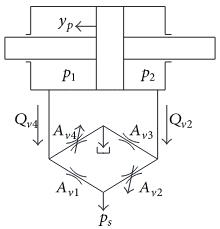
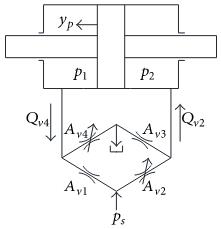
Этот возбудитель, производящий гидравлический резонанс, находится в условии, когда рабочая частота должна достигать собственной частоты. Таким образом, ускорение поршня будет значительно увеличено, так что поршень все еще перемещается в левом направлении, даже если он проходит по центральному положению гидравлического цилиндра, когда отверстия 1 и 3 клапана открыты (зоны отверстия обозначены Aν1 и Aν2), где масло направляется в левую камеру цилиндра, а затем сливается из правой камеры цилиндра в резервуар (скорости потока, соответственно Qν1 и Qν2). Это приводит к тому, что объем левой камеры сужается, а затем давление левой камеры p1 постепенно увеличивается. В результате масло в этой камере сжимается до тех пор, пока давление в левой камере p1 не будет выше давления в системе ps, как показано на рисунке 4(а). Когда p1 достаточно высоко, появится течение масла в обратном направлении, потому что это давление, превышающее давление в системе, настолько велико, что масло возвращается обратно в резервуар, как показано на рисунке 4(b). Затем сжатое масло начинает постепенно расширяться, так что сила инерции уменьшается до нуля, а затем поршень приводится в движение для обратного движения, которое может быть получено из направления стрелки смещения yp на рисунке 4(с). Это приводит к увеличению объема левой камеры и уменьшению давления левой камеры. До тех пор, пока p1 не станет ниже ps, масло остановится в резервуаре и повторится, чтобы войти в левую камеру цилиндра и выйти из правого цилиндра, чтобы привести поршень вправо, как показано на рисунке 4(d). Когда поршень перемещается в центральное положение гидравлического цилиндра, порты 1 и 3 клапана закрыты.
 (a)
(a)
 (b)
(b)
 (c)
(c)
 (d)
(d)
Когда катушка двумерных клапанов вращается, масло высокого давления течет в правую камеру цилиндра через отверстие 2 клапана и выходит из левой камеры через отверстие 4 клапана (отверстия клапана 2 и 4 открыты, области отверстия обозначаются через Aν1 и Aν2); поршень приводится в движение вправо под действием силы инерции. Объем правой камеры уменьшается, а затем давление правой камеры p2 постепенно увеличивается. Когда это давление p2 будет выше, чем давление в системе ps, снова появится течение масла в обратном направлении, как показано на рисунках 5(a) и 5(b). Затем сжатое масло в правой камере начинает постепенно расширяться, так что сила инерции уменьшается до нуля, а затем поршень получает направление вращения. Это приводит к увеличению объема правой камеры и уменьшению давления правой камеры. Когда p2 будет ниже ps, масло останавливается в резервуаре и течет в правую камеру и выходит из левой камеры (скорости потока, соответственно Qν1 и Qν2), чтобы привести поршень влево. Это проиллюстрировано на рисунках 5(c) и 5(d). Когда поршень перемещается в центральное положение гидравлического цилиндра, порты 2 и 4 клапана закрываются, и порты 1 и 3 клапана открываются одновременно. Следовательно, поршень гидравлического цилиндра приводится в движение для совершения возвратно-поступательного движения. Возбуждаемая вибрация достигается при условии резонансной частоты.
 (a)
(a)
 (b)
(b)
 (c)
(c)
 (d)
(d)
3.2. Динамический анализ
При проведении динамического анализа необходимо, чтобы нелинейные алгебраические уравнения, описывающие кривые давления, линеаризовались. Общее выражение для потока нагрузки
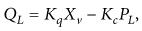 |
(1) |
где QL – поток через нагрузку, Kq – усиление потока, Xν – положение клапана, Kc – коэффициентом давления потока и является перепадом давления на нагрузке.
В комбинации 2D-клапана и поршня идеальная геометрия 2D-портов клапана полностью аналогична согласованным и симметричным отверстиям критического центрального сервоклапана. Поэтому применение уравнения непрерывности к каждой из поршневых камер дает
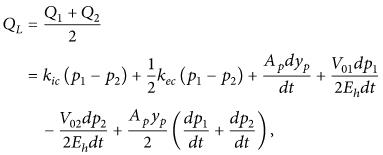 |
(2) |
где, Q1, Q2 – прямое и обратное течение, p1, p2 – давление в прямом и обратном направлениях, kic – внутреннее или поперечное значение коэффициента утечки поршня, kec – внешним коэффициентом утечки поршня, yp – смещение поршня, Ap – площадь поршня, V01 – начальным объемом передней камеры, V02 – начальный объем обратной камеры и Eh – объемный модуль масла.
Предполагается, что поршень центрирован, а объемы поршневых камер равны; то есть, V01 = V02 = Vt/2. Это предположение заключается в том, что амплитуда колебаний меньше при высокой рабочей частоте, поэтому Ap⋅yp здесь проигнорировано. Следовательно
 |
(3) |
где ktc – общий коэффициент утечки поршня и Vt – общий объем жидкости при сжатии в обеих камерах.
Выражения объема и непрерывности могут быть преобразованы Лапласом, чтобы получить
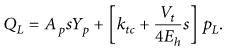 |
(4) |
Полученное уравнение силы, преобразованное Лапласом
 |
(5) |
где m – общая масса поршня и нагрузки, относящаяся к поршню, Bp – коэффициент вязкого демпфирования поршня и нагрузки, KL – градиент нагрузочной пружины и FL – произвольная сила нагрузки на поршень.
Три основных уравнения (1), (4) и (5) представлены в блок-схеме на рисунке 6.
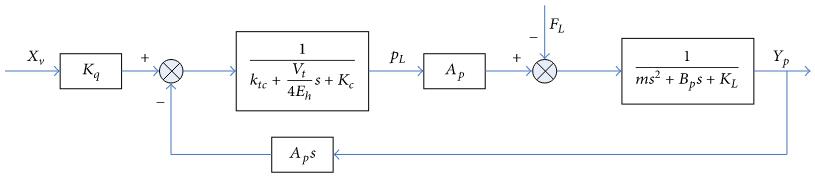
Поток нагрузки в зависимости от положения клапана и линеаризации нагрузки может дать полное описание характеристик установившегося клапана. Однако в электрогидравлической возбужденной системе, контролируемой 2D, давление нагрузки с колебаниями высокочастотного периода не было выполнено для линейных условий. Таким образом, блок-схема этой модели показана на рисунке 7.
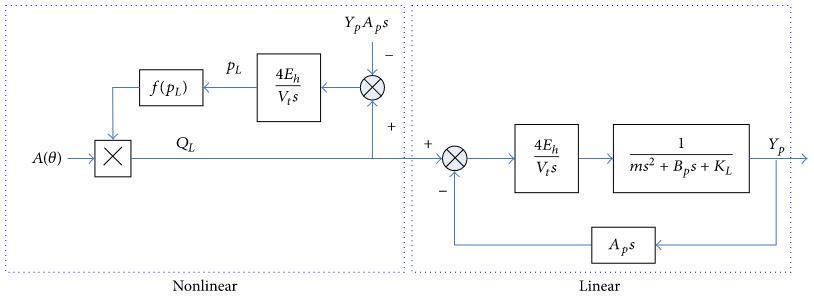
Передаточная функция для этого условия
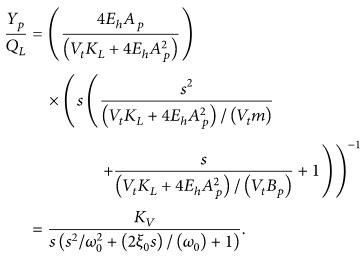 |
(6) |
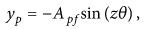
Анализ описания функционального уравнения (6) дает резонансную частоту:
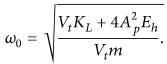 |
(7) |
Очевидно, что резонансная частота для электрогидравлического возбудителя, управляемая двумерным клапаном, состоит из гидравлической части и механической части.
3.3. Резонансный пик
В этой электрогидравлической системе возбуждения имеется резонанс, когда рабочая частота увеличивается до собственной частоты системы. Это явление вызывает возбуждение выходного сигнала с фиксированной амплитудой и частотой. Поскольку возбужденная волна только содержит доминирующую частоту, но не имеет других гармоник, предполагается, что:
 |
(8) |
где Apf – резонансный пик.
И падение давления на нагрузке под резонансной частотой
 |
(9) |
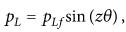
где pLf – амплитуда давления нагрузки.
Как обсуждалось в разделе 3.1, уравнения потока переписываются как
 |
(10) |
где C0 – константа, связанная с коэффициентом скорости потока и плотностью масла.
На основе энергосбережения входная энергия равна выходной энергии в цикле; то есть,
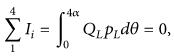 |
(11) |
где
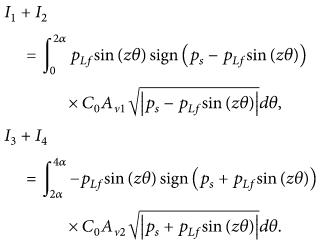 |
(12) |
Уравнения (9), (10) и (11) могут быть решены одновременно, чтобы получить
 |
(13) |
где ω – отношение давления.
Предполагая, что сила массы и сила пружины преобладают, уравнение силы на поршне
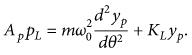 |
(14) |
Поэтому эти уравнения затем можно объединить, чтобы получить результирующий резонансный пик:
 |
(15) |
Понятно, что резонансный пик зависит от электрогидравлической системы возбудителя и не имеет отношения к входным параметрам, включая области отверстий или формы портов клапана.
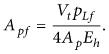
4. Эксперименты и результаты
Экспериментальная система иллюстрируется на рис. 8, которая в основном состоит из комбинации двумерного клапана и поршня, элементов захвата и контрольной части. Этот возбудитель в основном применяется к высокотемпературной испытательной машине для усталости, поэтому сила нагрузки может рассматриваться как рама в осевом направлении цилиндра. Для измерения смещения поршня выбирается датчик перемещения для установки внутри стержня цилиндра. Силовая ячейка помещается между концом стержня цилиндра и жесткой рамой для измерения выходной силы поршня цилиндра. И два датчика давления, соответственно, используются для получения давления в правой и левой камерах. Эти сигналы усиливаются, а затем отправляются на промышленный компьютер для отображения, сохранения и дальнейшего лечения. Сигналы частоты и амплитуды посылаются отдельно на два двигателя для управления вращательным и линейным движением катушки 2D-клапана. Сигнал смещения посылается на сервоклапан, соединенный параллельно с 2D-клапаном для управления смещением смещения выходной вибрации.

(a)
(b)
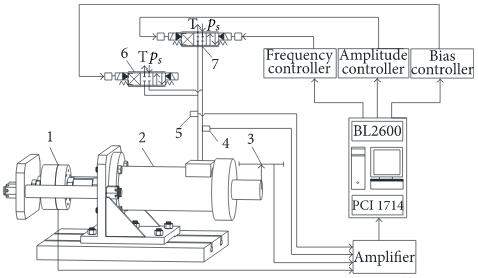
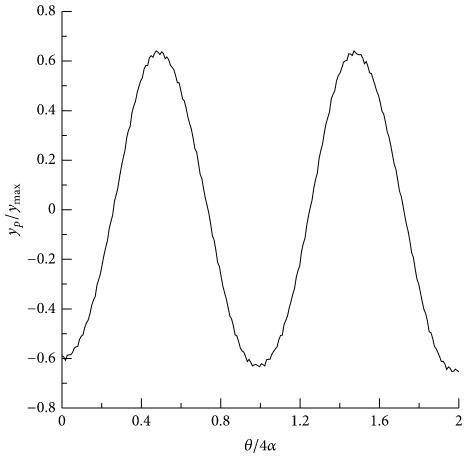
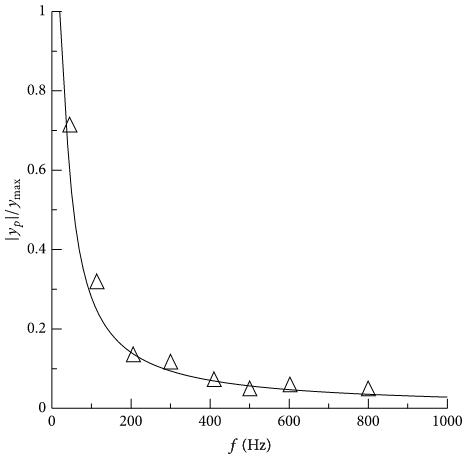
Частичные экспериментальные возбужденные сигналы показаны на рисунке 9. И соотношение амплитуды колебаний и рабочей частоты суммируется и также представлено на этом рисунке. Амплитуда колебаний быстро уменьшается с увеличением рабочей частоты, но имеет тенденцию быть плоской, поскольку эта частота очень близка к собственной частоте.
 (a)
(a)
 (b)
(b)
 (c)
(c)
 (d)
(d)
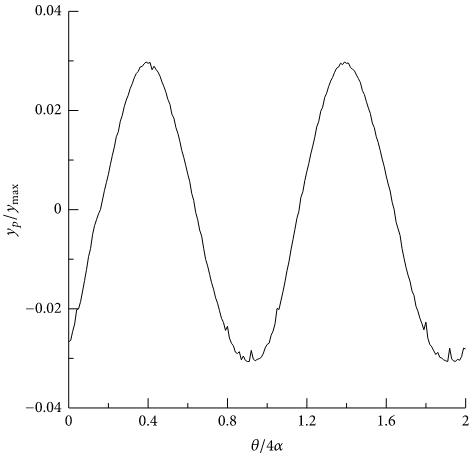
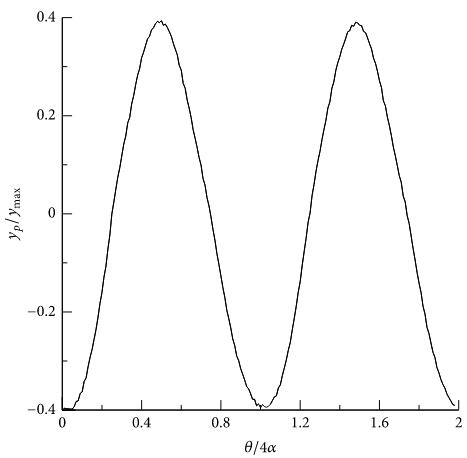
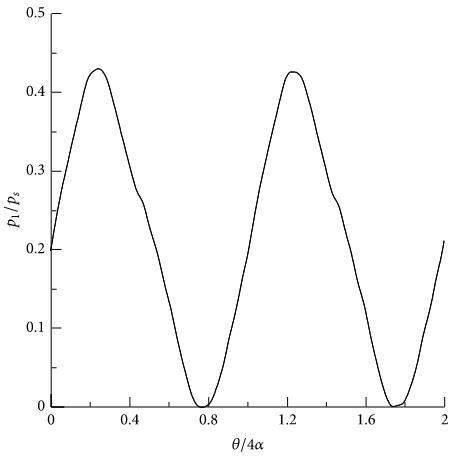
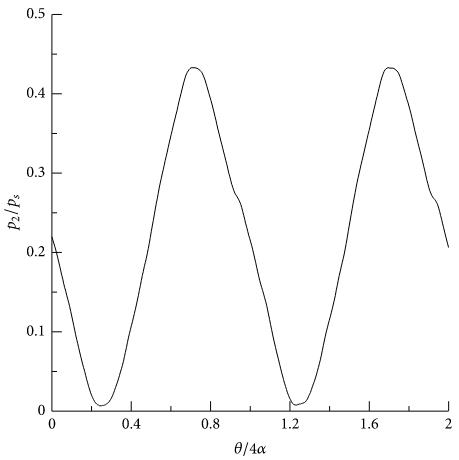
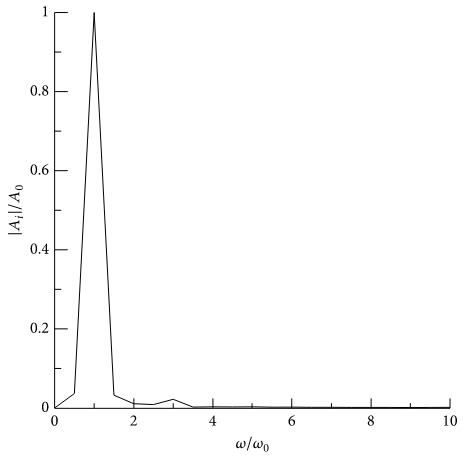
Первичные резонансные результаты приведены на рисунке 10, который включает в себя форму волны смещения, форму волны давления в каждой камере и частотный состав.
 (a)
(a)
 (b)
(b)
 (c)
(c)
 (d)
(d)
Обращаясь к рисунку 10, можно увидеть, что амплитуда колебаний, очевидно, увеличивается в резонансной частотной точке. Но давление в каждой камере не выше давления в системе, что вызывает экспериментальную резонансную амплитуду, которая меньше теоретического результата. Основным источником является то, что вязкая сила полностью игнорируется в резонансном анализе, хотя она не является доминирующей и представляет собой мягкую величину, которую трудно измерить и вычислить.
5. Выводы
Двойной клапан используется для управления электрогидравлическим возбудителем для рабочей частоты, значительно увеличивающейся и даже достигающего резонансной частоты. Гидравлический резонанс является своеобразным резонансным явлением, поэтому необходимо проанализировать его характеристики, особенно в контексте энергосбережения. Теоретический резонансный пик является константой и дается аналитическое выражение, которое только в зависимости от этой самой системы возбудителя, а не как механическая резонансная амплитуда, становится выше, чтобы разрушить всю систему на резонансной частоте. Экспериментальная система построена для проверки теоретического анализа. Несмотря на наличие связи между амплитудой колебаний и рабочей частотой, эта амплитуда внезапно увеличивается до резонансного пика на резонансной частоте. Следовательно, резонансная энергия может использоваться в тесте с высоким циклом усталости для уменьшения внешнего входа в эту систему и улучшения амплитуды колебаний на высокой частоте.
Перечень ссылок
- W. Schutz, “A history of fatigue,” Engineering Fracture Mechanics, vol. 54, no. 2, pp. 263–300, 1996. View at Publisher · View at Google Scholar · View at Scopus
- Y. Huang, S. Liu, and J. Zhao, “Optimal design of two-dimensional band-gap materials for uni-directional wave propagation,” Structural and Multidisciplinary Optimization, vol. 48, no. 3, pp. 487–499, 2013. View at Publisher · View at Google Scholar · View at MathSciNet · View at Scopus
- H. Tian, D. Fielden, M. J. Kirkham, and P. K. Liaw, “Control of noise and specimen temperature during 1?kHz fatigue experiments,” Journal of Testing and Evaluation, vol. 34, no. 2, pp. 92–97, 2006. View at Google Scholar · View at Scopus
- D. Lanning, G. K. Haritos, T. Nicholas, and D. C. Maxwell, “Low-cycle fatigue/high-cycle fatigue interactions in notched ti-6ai-4v,” Fatigue and Fracture of Engineering Materials and Structures, vol. 24, no. 9, pp. 565–577, 2001. View at Publisher · View at Google Scholar · View at Scopus
- D. L. Davidson, J. B. Campbell, and R. A. Page, “The initiation and growth of fatigue cracks in a titanium aluminide alloy,” Metallurgical Transactions A, vol. 22, no. 2, pp. 377–391, 1991. View at Publisher · View at Google Scholar · View at Scopus
- X. Du, D. Niu, and W. Liao, “Design and experimental studies on the inverse control magneto-rheological damper,” Journal of Vibration and Shock, vol. 25, no. 5, pp. 49–53, 2006. View at Google Scholar · View at Scopus
- J. M. Morgan and W. W. Milligan, “A1 kHz servohydraulic fatigue testing system,” in Proceeding of the Conference High Cycle Fatigue of Structural Materials, pp. 305–312, Warrendale, Pa, USA, 1997.
- C.-T. Chen, J.-C. Renn, and Z.-Y. Yan, “Experimental identification of inertial and friction parameters for electro-hydraulic motion simulators,” Mechatronics, vol. 21, no. 1, pp. 1–10, 2011. View at Publisher · View at Google Scholar · View at Scopus
- J. G. Hao and Y. C. Zhang, “Study on the properties of new electro-hydraulic exciting system,” Journal of Taiyuan University of Technology, vol. 34, no. 6, pp. 706–709, 2003. View at Google Scholar
- Y. Ren and J. Ruan, “Regulating characteristics of an electro-hydraulic vibrator multiply controlled by the combination of a two-dimensional valve and a standard servo valve,” Proceedings of the Institution of Mechanical Engineers Part C: Journal of Mechanical Engineering Science, vol. 227, no. 12, pp. 2707–2723, 2013. View at Publisher · View at Google Scholar · View at Scopus