
Введение
1. Актуальность темы
2. Цели и задачи исследования
3. Обзор типов БПЛА
4. Обзор задач, выполняемых БПЛА
5. Обзор имеющихся на рынке технических решений для автономного управления БПЛА
6. Обзор компонентов для разработки программного комплекса управления БПЛА
Выводы
Список источников
Введение
На данный момент беспилотные летательные аппараты (БПЛА) применяются для решения различных задач, которые раньше решались с применением пилотируемых летательных аппаратов. Одни из первых БПЛА были достаточно дорогие в эксплуатации, но с интенсивным скачком в развитии технологий стоимость эксплуатации БПЛА в подавляющем количестве случаев стала меньше, а их малая по сравнению с пилотируемыми летательными аппаратами себестоимость и отсутствие пилота на борту позволяют им нести большую полезную нагрузку и отправляться на задания, которые имеют риск потери летательного аппарата. Изначально БПЛА пилотировались оператором с земли удалённо, но данная схема имеет свои недостатки, например, невозможность управления в связи с большим удалением, особенностями местности, недоступностью радиочастот, помехами и т.д. Прогресс не стоит на месте и на рынке стали появляться беспилотные системы, оснащенные автопилотом и бортовым компьютером, позволяющие решать сложные задачи в автономном режиме, которые не всегда может корректно выполнить оператор или присутствие оператора не нужно вовсе, например отслеживание пожаров, утечек, проникновений на объект и т.д., поскольку есть возможность связываться с другими электронными системами и в режиме реального времени взаимодействовать с аварийными командами.
1. Актуальность темы
Еще несколько лет назад беспилотные авиационные системы использовались только в военной сфере из-за дороговизны и больших размеров вычислительного оборудования, сегодня используются повсеместно. Прогресс шагнул далеко вперёд, размеры и стоимость компьютеров уменьшились, их производительность увеличилась, появился целый класс – микрокомпьютеры. Теперь можно создавать не просто радиоуправляемые недорогие беспилотные летательные аппараты (БПЛА), а и БПЛА с полноценным компьютером на борту, который будет управлять им либо выполняя команды данные оператором, либо выполняя заранее загруженное полётное задание. Также беспилотные авиационные системы имеют неоспоримые преимущества перед пилотируемыми системами – отсутствие пилота, дешевизна и малые размеры, из-за чего они неминуемо шагнули в гражданский сектор.
Использование БПЛА является довольно актуальным направлением развития для проведения мониторинга промышленных объектов, аэрофотосъемки, мониторинга чрезвычайных ситуаций. Все данные получаются автономно даже из труднодоступных мест без угрозы жизни человеку, при этом стоимость использования БПЛА гораздо ниже, чем при использовании пилотируемых аппаратов.
В связи с этим, использование беспилотных летательных аппаратов является наиболее эффективным средством для мониторинга промышленных объектов. Несмотря на огромное количество задач, решаемых беспилотными летательными аппаратами, их применение в странах СНГ значительно меньше чем за рубежом, поэтому поиск возможностей использования и их реализация в нашей стране являются наиболее актуальными.
2. Цели и задачи исследования
Целью данной диссертации является поиск возможностей применения БПЛА для использования в гражданском секторе.
Для достижения результатов были поставлены следующие задачи:
выбор аппаратной части комплекса управления и среды разработки ПО
создание принципиальной схемы, её сборка и тестирование
программная реализация алгоритмов управления БПЛА
тестирование комплекса в целом
устранение недочётов
Основными проблемами являются:
выбор компонентов и корпуса для БПЛА;
выбор радиомодулей и частотного диапазона для управления БПЛА;
протоколы обмена информацией между БПЛА и оператором;
разрешение на использование воздушного пространства.
В гражданском секторе в ближайшее время наиболее востребованными задачами БПЛА будут мониторинг и разведка. Мониторинг промышленных объектов сейчас является одной из наиболее актуальных задач, и в случае использование беспилотных авиационных систем это поможет сэкономить много денег и времени, поскольку на старт БПЛА уходит намного меньше времени нежели на старт пилотируемого летательного аппарата и время пребывания в воздухе может быть намного больше за счёт малых размеров и малой массы. С финансовой точки зрения затраты на обслуживание пилотируемых летательных аппаратов намного больше, нежели на обслуживание беспилотных летательных аппаратов.
Из этого можно сделать вывод, что БПЛА будут пользоваться спросом при мониторинге промышленных объектов и объектов большой протяжённости, например, различных складов, аграрных угодий, магистралей и трубопроводов.
3. Обзор типов БПЛА
Беспилотные летательные аппараты являются одними из важнейших нововведений последних лет. На данный момент существует много типов и разновидностей БПЛА. Это всё обуславливается различием нужд и задач для которых они разрабатывались. Одни, например, необходимы для аэрофотосъемки мероприятий, киносъемок, другие же для полётов на большие расстояния, инспекций и мониторинга объектов большой протяжённости. Это различие определяет размер, вес и конструкцию. Существует несколько основных типов гражданских БПЛА.
БПЛА самолётного типа – имеют жёсткое неподвижное крыло, которое создаёт подъёмную силу. Благодаря этому они легкие в управлении, устойчивы к жёстким погодным условиям, имеют возможность нести больше полезной нагрузки, а также преодолевать большие расстояния с меньшими энергозатратами. Сферы их применения – доставка небольших грузов, мониторинг объектов большой протяженности, длительные миссии. Однако он не подходит для выполнения миссий, в которых необходима высокая точность позиционирования, поскольку всегда должен быть в движении для создания подъёмной силы. Внешний вид данного типа БПЛА представлен на рисунке 3.1. [1]

Рисунок 3.1 – БПЛА самолётного типа
БПЛА вертолётного типа – подъёмная сила создаётся несущим винтом или несколькими винтами. Достоинствами этого типа являются вертикальный взлёт и посадка, зависание в воздухе, точного маневрирования, но они имеют меньший запас энергии и меньшую дальность хода. Данные БПЛА подходят для миссий, в которых необходима высокая точность позиционирования, вроде проверки состояния железной дороги, трубопроводов, построек и т.д. Внешний вид данного типа БПЛА представлен на рисунке 3.2.[2]
Мультироторные БПЛА – то же что и БПЛА вертолётного типа, но имеет больше несущих винтов.
Мультироторные БПЛА подразделяются на:
3 несущих винта (трикоптеры);
4 несущих винта (квадракоптеры);
6 несущих винтов (гексакоптеры);
8 несущих винтов (октокоптеры).
При этом они имеют практически такие же качествами, как винтокрылые, однако намного устойчивее, более маневренные и лёгкие в управляемости. Предназначением мультироторных БПЛА являются миссии, требующие особой точности. Внешний вид данного типа БПЛА представлен на рисунке 3.3. [3]


4. Обзор задач, выполняемых БПЛА
После создание самолётов и вертолётов они зарекомендовали себя как отличное средство для создания карт местности, разведки новой местности, поиска каких-либо строений. Со временем расширился круг их применения, но с этим и увеличилась опасность для пилота. Также для того, чтобы нести вес пилота летательный аппарат должен обладать размерами, достаточными для размещения пилота, а с этим увеличивается масса, размеры тяговой установки (двигателя) и потребление топлива. [4]
На смену пилотируемым летательным аппаратам пришли беспилотные летательные аппараты, которые выдерживают большую температуру, большие перегрузки, при этом потребляя меньше топлива, имея меньшие размеры и большую манёвренность. Благодаря этому некоторые типы могут даже производить работы в замкнутых пространствах, например, в пещерах или зданиях. [4, 5]
Основными задачами является картографирование (рисунок 4.1) [6], разведка местности (рисунок 4.2) [7], мониторинг объектов (рисунок 4.3) [8], охрана объектов (рисунок 4.4) [9]. Применение БПЛА для данных задач существенно снижает стоимость проведения работ за счёт экономии топлива, обслуживания «большого» самолёта и оплаты труда пилоту. [5]


(анимация: 5 кадров, 5 циклов повторения, 86.2 килобайт)

Также БПЛА помогают при спасении жизней производя поиск людей (рисунок 4.5) [10], обнаружение пожаров (рисунок 4.6) [11], оказывая помощь в проведении спасательные операции (рисунок 4.7) [12].



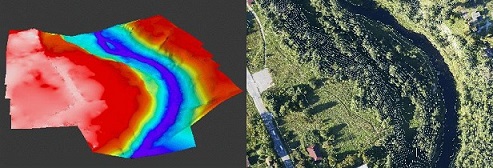
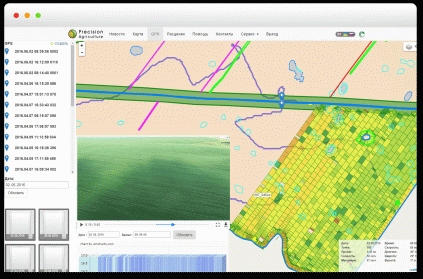
Сельское хозяйство также использует БПЛА для обследования полей (рисунок 4.8) [13], что позволяет избежать ошибок в расчётах на закупку зерен около 10-20%, которые неизбежны при использовании карт, а также для оценки состояния посевов (рисунок 4.9) [14] и мониторинга аграрных мероприятий (рисунок 4.10) [15]. [16]
Применение БПЛА для сельского хозяйства помогает решать следующие задачи: [15]
создание и обновление в электронном виде карт и планов обрабатываемых земель
учет сельскохозяйственных угодий
планирование посевных работ по производственным участкам
контроль объема и качества проведения полевых работ
ведение оперативного мониторинга состояния посевных культур
оценка всхожести сельскохозяйственных культур
прогноз урожайности сельскохозяйственных культур
контроль качества сбора урожая
охрана посевов от кражи
экономическая оценка
ведение экологического мониторинга сельскохозяйственных угодий
расчет объема вносимых удобрений и т.п.


5. Обзор имеющихся на рынке технических решений для автономного управления БПЛА
В данный момент на рынке представлено достаточно много решений для автономного управления БПЛА. Некоторые имеют открытую платформу с возможностью доработки под конкретные цели и задачи, другие же имеют закрытую платформу и позволяют делать только то, что заложил в неё производитель, не позволяя модифицировать систему. Далее будут рассмотрены обе разновидности систем
Открытые системы представлены следующими:
ArduPilot Mega 2.6;
Openpilot CC3D;
MultiWii SE v2.5.
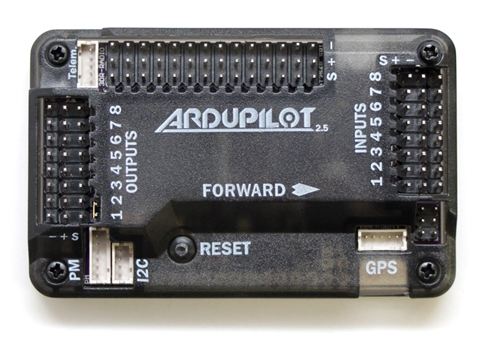
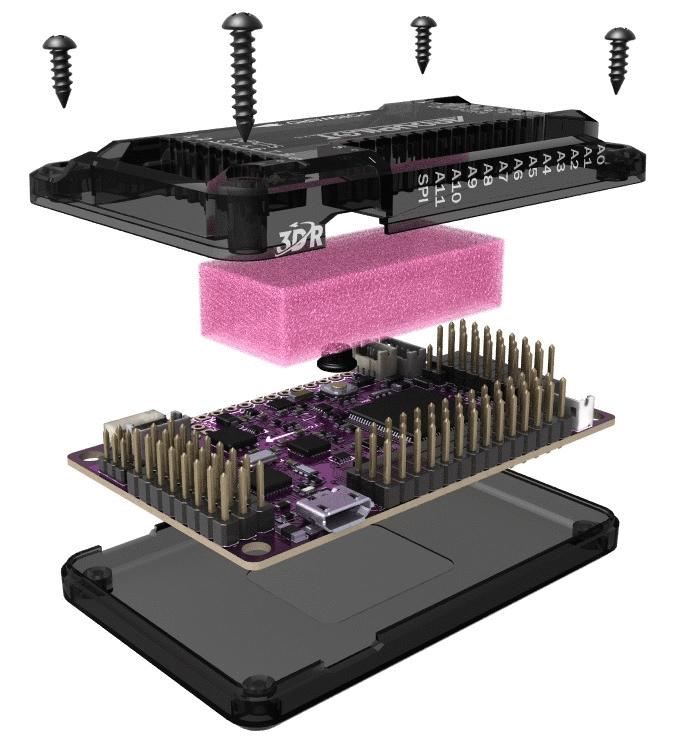
ArduPilot Mega 2.6 является одним из самых мощных и популярных комплексов управления БПЛА. Содержит в себе не только управляющий микроконтроллер, но и набор различных датчиков, а именно – барометр и акселерометр-гироскоп, на основании данных, полученных с этих датчиков, выполняется управление полётом. Внешний вид контроллера представлен на рисунках 5.1 и 5.2. [17]
Данный контроллер может управлять не только БПЛА, но и наземными, водными и подводными беспилотными аппаратами, что доступно в очень малом количестве контроллеров
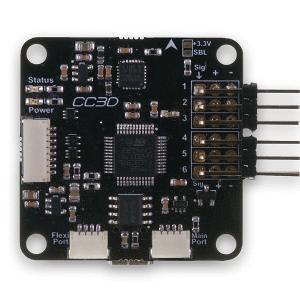
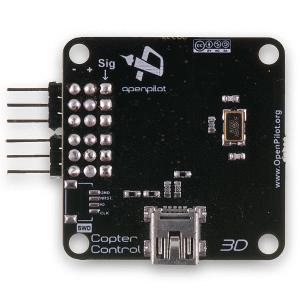
Openpilot CC3D – построен на базе более мощного, чем ArduPilot Mega 2.6, микроконтроллера STM32. Также позволяет управлять большим числом беспилотных аппаратов, но только летательных. За счёт более мощного микроконтроллера может более быстро выполнять команды, что немаловажно для полностью автономного управления БПЛА. Внешний вид представлен на рисунках 5.3 и 5.4. Размеры и вес меньше, чем у ArduPilot Mega 2.6, но и набор датчиков тоже, т.к. отсутствует барометр, который используется для определения высоты. [18]
За счёт своих массогабаритных характеристик идеально подходит для использования в микро-БПЛА, например, для полётов в зданиях или обследования тоннелей
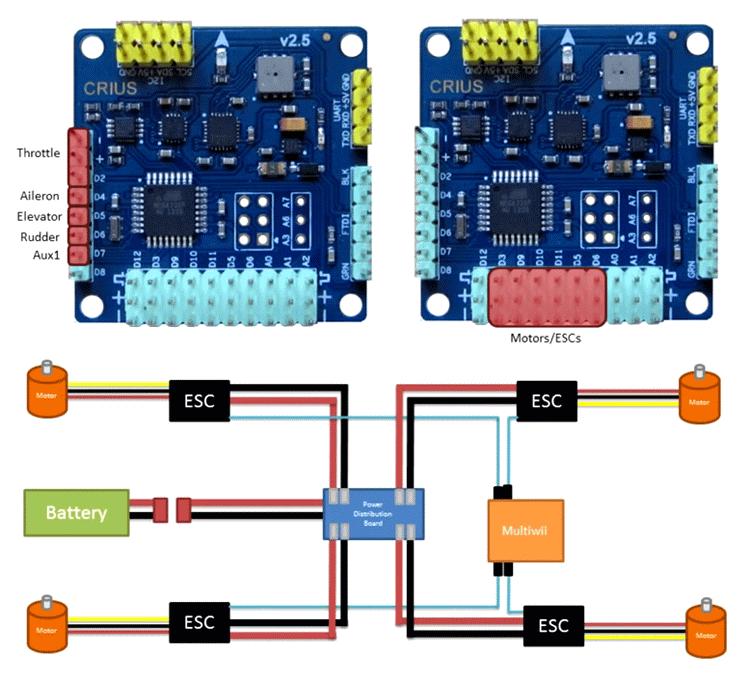
MultiWii SE v2.5 основан на Arduino, как и ArduPilot Mega 2.6, но уступает ему по возможностям, хотя и имеет такой же набор датчиков. Изначально подходил только для БПЛА любительского уровня, но за счёт открытости исходного кода ПО с помощью сообщества развился до приличного уровня и может конкурировать с другими. Также, как и Openpilot CC3D, имеет малые размеры и вес и имеет возможность использоваться в микро-БПЛА. Внешний вид представлен на рисунке 5.5
Характеристики и возможности данных контроллеров представлены в виде сравнительных таблиц – таблица 5.1 и таблица 5.2 соответственно. [19]
Таблица 5.1 – Характеристики открытых полётных контроллеров
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 5.2 – Возможности открытых полётных контроллеров
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Windows/Mac/ |
Windows/Mac/ |
Windows/Mac/ |
Также есть разделение по типам беспилотных аппаратов, которыми может управлять комплекс. Эти типы представлены в таблице 5.3. [19]
Таблица 5.3 – Типы беспилотных аппаратов, которыми может управлять комплекс
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, по данным таблиц можно сделать выводы, что комплекс управления ArduPilot Mega 2.6 имеет больший набор возможностей, чем Openpilot CC3D и MultiWii SE v2.5, но при этом имеет большие размеры и вес
6. Обзор компонентов для разработки программного комплекса управления БПЛА
Главным компонентом программного комплекса управления БПЛА является главный вычислительный центр. Раньше использовались микроконтроллеры, которые имели малый функционал, но с развитием технологий появились компьютеры размером с немного больше микроконтроллеров – микрокомпьютеры.
Первым массовым из них стал Raspberry Pi Model A, после которого начали появляться усовершенствованные версии, характеристики которых представлены в таблице 6.1, а внешний вид представлен на рисунке 6.1. [20, 21]
Таблица 6.1 – Характеристики Raspberry Pi
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Этот микрокомпьютер совершил революцию в мире электроники, позволив использовать относительно большие вычислительные мощности в маленьких устройствах, что дало возможность создавать автономные системы без использования ПК
На волне популярности Raspberry Pi начали появляться множество его «клонов», с большей производительностью, но недостаточной поддержкой со стороны производителя. Со временем стали выпускаться нормально работающие микрокомпьютеры, которые по соотношению цена/возможности значительно превосходят оригинал.
Одним из наиболее удачных аналогов Raspberry Pi для встраиваемых систем, т.е. систем в которых нет необходимости вывода изображения на монитор, является Orange Pi Zero. Характеристики которого представлены в таблице 6.2, а внешний вид на рисунке 6.2. [22]
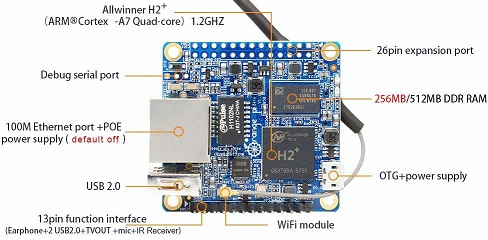
Таблица 6.2 – Характеристики Orange Pi Zero
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Данный микрокомпьютер обладает 3 USB портами, что позволяет подключать к нему различные периферийные устройства, например, камеры, различные модули, запоминающие устройства и т.д. Также имею 26 портов ввода-вывода общего назначения, среди которых имеются I2C, SPI, UART, благодаря которым есть возможность подключать различные датчики, радиомодули, камеры и т.д. [22]
Из датчиков необходимыми являются датчики положения в пространстве, а именно акселерометр-гироскоп, компас, барометр и GPS-модуль, а в качестве радиомодуля можно использовать как WiFi радиомодуль, так и любой другой, поскольку есть возможность взаимодействия с практически любым протоколом передачи.
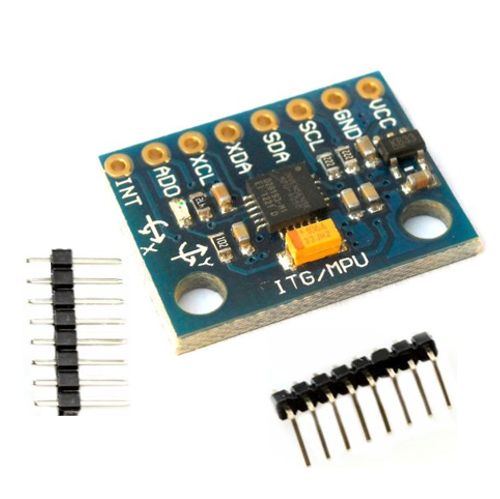
Акселерометр-гироскоп предназначен для определения углов отклонения летательного аппарата относительно плоскости Земли. Это необходимо для возможности автоматического управления или управления с плохой видимостью. В качестве датчика акселерометра-гироскопа можно использовать модуль акселерометра-гироскопа MPU6050, внешний вид которого представлен на рисунке 6.3, а характеристики в таблице 6.3. [23]
Таблица 6.3 – Характеристики модуля акселерометра-гироскопа MPU-6050
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
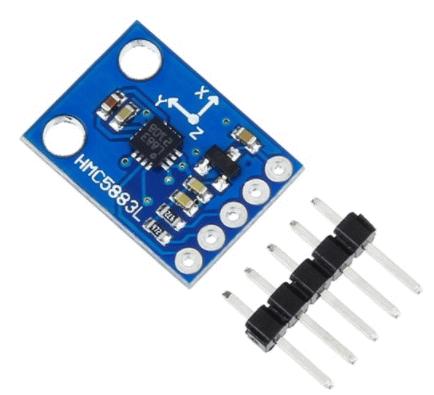
Электронный компас используется для определения угла направления движения летательного аппарата и возможности изменения направления движения. На рынке существует немного вариантов модулей электронного компаса, но одним из известных является HMC5883L, характеристики которого представлены в таблице 6.4, а внешний вид представлен на рисунке 6.4. [24]
Таблица 6.4 – Характеристики модуля компаса HMC5883L
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
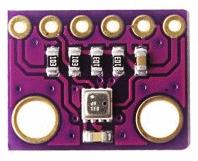
Электронный барометр предназначен для измерения атмосферного давления, но поскольку на разной высоте давление разное, то еще есть возможность измерения барометрической высоты необходимой для автономного управления БПЛА, слежения за его высотой и исключения незапланированного соприкосновения с поверхностью Земли. Для комплекса управления предлагается использовать модуль барометра Bosch BMP-280. Характеристики указаны в таблице 6.5, внешний вид представлен на рисунке 6.5. [25]
Таблица 6.5 – Характеристики модуля барометра BMP-280
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Самым важным модулем, без которого становится невозможным автономное управление БПЛА является GPS-модуль. Он служит для определения координат текущего местоположения летательного аппарата, его скорости и направления движения. На рынке существует множество различных модулей, большинство из них поддерживают работу не только с GPS, но и с ГЛОНАСС и Beidou. Это повышает точность, но стоимость этих модулей достаточно высока. В качестве GPS-модуля возможно применять Ublox NEO-6M. Характеристики представлены в таблице 6.6, а внешний вид на рисунке 6.6. [26]
Таблица 6.6 – Характеристики GPS-модуля барометра Ublox NEO-6M
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выводы
Таким образом, разрабатываемый БПЛА сможет вести практически беспрерывный мониторинг состояния объектов имея малые размеры и стоимость, при этом не требуя постоянного контроля со стороны персонала. За счёт модульной системы существует возможность переоснастить его для выполнения иных задач.
На текущем этапе исследования получены следующие результаты:
проанализированы существующие комплексы управления БПЛА, изучены достоинства и недостатки;
выбраны комплектующие и разработана структурная схема аппаратной составляющей комплекса управления БПЛА, которая была собрана и запущена;
описаны базовые алгоритмы чтения информации с датчиков и управления БПЛА;
выбраны материалы корпуса и тип БПЛА для обеспечения малого веса и необходимых лётных характеристик.
На следующем этапе планируется построить БПЛА, установив на него комплекс управления, и провести лётные испытания с последующей доработкой как программной, так и аппаратной частей.
При написании данного реферата магистерская диссертация еще не завершена. Окончательное завершение: май 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
АВАКС [Электронный ресурс]: GAMMA – электронные данные, – режим доступа http://uav-siberia.com/catalog/product/gamma/ – дата доступа: сентябрь 2017.
"КБ ИНДЕЛА" [Электронный ресурс]: Беспилотный летательный аппарат INDELA-I.N.SKY – электронные данные, – режим доступа http://www.indelauav.com/product_insky.html – дата доступа: сентябрь 2017.
DJI Drone.UA-официальный дилер DJI в Украине [Электронный ресурс]: Inspire 2 – электронные данные, – режим доступа http://drone.ua/dji/shop/dronyi-dji/inspire/kvadrokopteryi-inspire/inspire-2/ – дата доступа: сентябрь 2017.
ZALA AERO GROUP [Электронный ресурс]: Применение беспилотников (беспилотных летательных аппаратов, БПЛА) – электронные данные, – режим доступа http://zala.aero/primenenie/ – дата доступа: сентябрь 2017.
Моисеев В.С. Основы теории эффективного применения беспилотных летательных аппаратов: монография. – Казань: Редакционно-издательский центр «Школа», 2015. 444 с. (Серия «Современная прикладная математика и информатика»).
Современные геоинформационные решения [Электронный ресурс]: Аэрофотосъемка с использованием беспилотного летательного аппарата – электронные данные, – режим доступа http://www.ark-on.ru/about/item119/ – дата доступа: сентябрь 2017.
Российская авиация [Электронный ресурс]: Тактический БПЛА «ГрАНТ» – электронные данные, – режим доступа http://авиару.рф/aviamuseum/aviatsiya/rf/bpla/takticheskij-bpla-grant/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Мониторинг трубопроводов и объектов нефтегазовой промышленности – электронные данные, – режим доступа http://www.rusgeo.com/distanczionnyij-kontrol-za-sostoyaniem-obektov-nefte-i-gazodobyivayushhej-promyishlennosti – дата доступа: сентябрь 2017.
ОАО «АГАТ-системы управления» [Электронный ресурс]: Услуги с использованием беспилотных летательных аппаратов (БЛА) – электронные данные, – режим доступа http://www.agat.by/products/robotic-platforms/unmanned-aircraft-complex/uav-service/ – дата доступа: сентябрь 2017.
AEROSCANAVIA [Электронный ресурс]: Аэрофотосъемка с БПЛА в разных сферах бизнеса – электронные данные, – режим доступа http://aeroscanavia.ru/ – дата доступа: октябрь 2017.
СъемкаСВоздуха.РФ [Электронный ресурс]: АЭРОФОТОСЪЕМКА В ЛЕСНОМ ХОЗЯЙСТВЕ – электронные данные, – режим доступа http://СъемкаСВоздуха.РФ/otrasli/bpla-v-leskhoze-i-rybnadzore.html – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ – электронные данные, – режим доступа http://dronesystems.ru/application/alert – дата доступа: октябрь 2017.
PreAgri [Электронный ресурс]: Возможности PreAgri – электронные данные, – режим доступа https://preagri.com/features.htm – дата доступа: октябрь 2017.
MIT Technology Review [Электронный ресурс]: Six Ways Drones Are Revolutionizing Agriculture – электронные данные, – режим доступа https://www.technologyreview.com/s/601935/six-ways-drones-are-revolutionizing-agriculture/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Использование беспилотников для нужд сельского хозяйства – электронные данные, – режим доступа http://www.rusgeo.com/ispolzovanie-bpla-dlya-nuzhd-selskogo-xozyajstva – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: СЕЛЬСКОЕ ХОЗЯЙСТВО – электронные данные, – режим доступа http://dronesystems.ru/application/sh – дата доступа: ноябрь 2017.
ArduPilot.org [Электронный ресурс]: Archived:APM 2.5 and 2.6 Overview – электронные данные, – режим доступа http://ardupilot.org/copter/docs/common-apm25-and-26-overview.html – дата доступа: ноябрь 2017.
LibrePilot/OpenPilot Wiki [Электронный ресурс]: CopterControl / CC3D / Atom Hardware Setup – электронные данные, – режим доступа http://opwiki.readthedocs.io/en/latest/user_manual/cc3d/cc3d.html – дата доступа: ноябрь 2017.
MosHobby [Электронный ресурс]: Полётные контроллеры – электронные данные, – режим доступа http://moshobby.ru/magazin-2/folder/poletnyye-kontrollery – дата доступа: ноябрь 2017.
Raspberry Pi – Википедия, свободная энциклопедия [Электронный ресурс]: – режим доступа https://ru.wikipedia.org/wiki/Raspberry_Pi – дата доступа: декабрь 2017.
Adafruit Industries, Unique & fun DIY electronics and kits [Электронный ресурс]: Raspberry Pi Model A – электронные данные, – режим доступа https://www.adafruit.com/product/1344 – дата доступа: декабрь 2017.
Orangepi [Электронный ресурс]: OrangePi Zero – электронные данные, – режим доступа http://www.orangepi.org/orangepizero/ – дата доступа: декабрь 2017.
emartee.com [Электронный ресурс]: MPU-6050 3 Axis Gyroscope And Accelerometer Module – электронные данные, – режим доступа http://www.emartee.com/product/42257/MPU%206050%203%20Axis%20Gyroscope%20And%20Accelerometer%20Module – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: HMC5883L Triple-Axis Magnetometer Compass Module GY-273 – электронные данные, – режим доступа https://www.addicore.com/HMC5883L-Module-p/ad306.htm – дата доступа: декабрь 2017.
ARDU.NET [Электронный ресурс]: Модуль датчик давления arduino module bmp280 Pressure Sensor – электронные данные, – режим доступа http://ardu.net/ru/datchiki-i-sensory/363-modul-bmp280-i2c-datchik-davleniya-i-temperatury-module-pressure-novinka-spi-120768573.html – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: u-blox NEO-6M GY-GPS6MV2 GPS module with on board EEPROM – электронные данные, – режим доступа https://www.addicore.com/NEO-6M-GPS-p/231.htm – дата доступа: декабрь 2017.