
СИНТЕЗ РОБАСТНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ КАЧЕСТВА ГОРЕНИЯ ТОПЛИВА В УСЛОВИЯХ ПАРОВОГО КОТЛА КОТЕЛЬНОЙ
Бирючева А.С., студ, Жукова Н. В., доц.,к.т.н
Донецкий национальный технический университет, г. Донецк, ДНР
Общая постановка проблемы.
В авторами предложена схема регулирования процессом качества горения топлива, учитывающая практически все флуктуации качества топлива, температуры подаваемого в топку воздуха. Это обеспечивается за счет каскадного регулирования и возможности работы системы автоматизации, как при нормальной производительности котла, так и в режиме розжига.
Было показано, что контроль качества процесса горения необходимо вести по содержанию CO2 и O2 в дымовых газах. Управление подачей воздуха должно вестись с довольно высокой точностью и обеспечивать отклонение значения CO2 не более чем на ±0,5 % (при колебаниях содержания CO2 в уходящих газах в среднем 8–12 %).[1]
В реальных условиях на систему автоматического управления действуют недетерминированные процессы. Возмущающие воздействия на объект управления случайны, а измерительная информация датчиков зашумлена. Поэтому при дальнейших исследованиях динамики разработанной системы имеет смысл проанализировать ее робастность в условиях неопределенности.
Методика решения.
Анализ робастности системы, т.е. проверки способности системы сохранять предъявляемые к ней показатели качества регулирования при изменении в определенных пределах параметров объекта и шумах в цепи управления и измерения, проведен с помощью схемы моделирования в пакете программ Matlab-Simulink(рис.1).
Рисунок 1 –Каскадная САР с учетом случайных воздействий
Мощность шума задана исходя из погрешности измерения датчиков. При ознакомлении с документацией выбранных датчиков была выяснено, что погрешность измерения датчика давления воздуха составляет +/- 0.05, а газоанализатора - +/-0.04. Для того что бы наложить помехи на данные которые передают датчики воспользуемся функцией wgn (whiteGaussiannoise), поскольку она позволяет задать уровень генерируемого шума в единицах, задаваемых параметром.
Анализ реакции системы с синтезированным ПИ-регулятором показала, что САУ с учетом шумов не выполняет предъявляемые к ней требования по показателям качества регулирования. Поэтому было принято решение оптимизировать полученные параметры настройки в реальном времени с помощью средств SimulinkResponseOptimization. Для настройки данного блока необходимо создать в рабочем пространстве Workspace переменныеkvar=0.0017,kp=7.2683, ki=0.0049 и указать kp и ki в блоке PID-control. Основные показатели качества регулирования переходного процесса при ступенчатом воздействии задаются в блоке CheckStepResponseCharacteristics для расчета коридора отклика системы(рис. 2).

Рисунок 2 –Показатели качества переходного процесса
Во время каждой итерации оптимизации, программа моделирует систему, и метод оптимизации изменяет параметры регулятора с целью уменьшения расстояние между полученной в результате моделирования реакцией системы на выходе и кусочно-линейными спецификациями допустимых границ выходного сигнала.
Сообщение Optimizationconverged указывает, что найдено оптимальное решение, которое отвечает требованиям к границам выходного сигнала(рис.3).
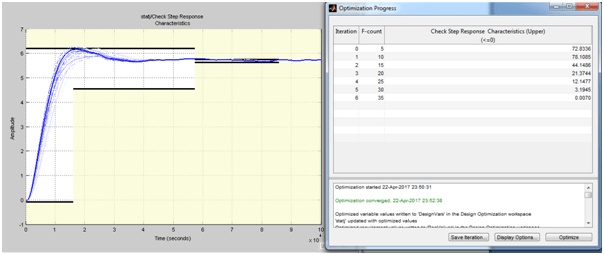
Рисунок 3 –Окна прогресса оптимизации после завершения подбора параметров kp, ki.
Проанализируем переходные характеристики концентрации кислорода(рис.4).
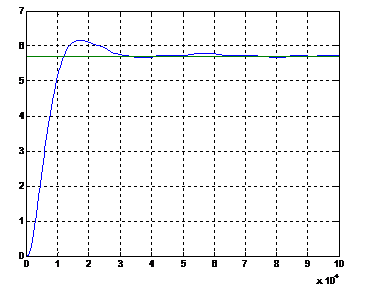
Рисунок 4 –Переходная характеристики концентрации кислорода
Регулятор концентрации, стремясь стабилизировать заданную концентрацию кислорода на выходе, в течение 1200 секунд отрабатывает изменение уставки по соотношению «топливо-воздух», не выходя за допустимый диапазон по концентрации 5,7±5%, что соответствует предъявляемым требованиям к системе. Этот процесс соответствуетнастроечным параметрам ПИ-регулятора:kр = 18.5093, ki = 0.0072.
На основании полученных результатов для ПИ регулятора, имеет смысл проанализировать изменение коэффициента передачи kvar при увеличении (уменьшении) подачи газа. При увеличении подачи газа на 3.8e3Па и при kvar=0.0015, результаты автоматической настройки обеспечили заданные требования по качеству переходного процесса с перерегулированием 9% и отрабатывает изменение уставки по соотношению «топливо-воздух в течение 1100 секунд, не выходя за допустимый диапазон по концентрации 5,7±5% (5.а). При уменьшении подачи газа на 3е3Па (kvar=0.0019), регулятор концентрации стремиться стабилизировать заданную концентрацию кислорода на выходе, в течение 1400 секунд, не выходя за допустимый диапазон по концентрации 5,7±5% (рис. 5. б).
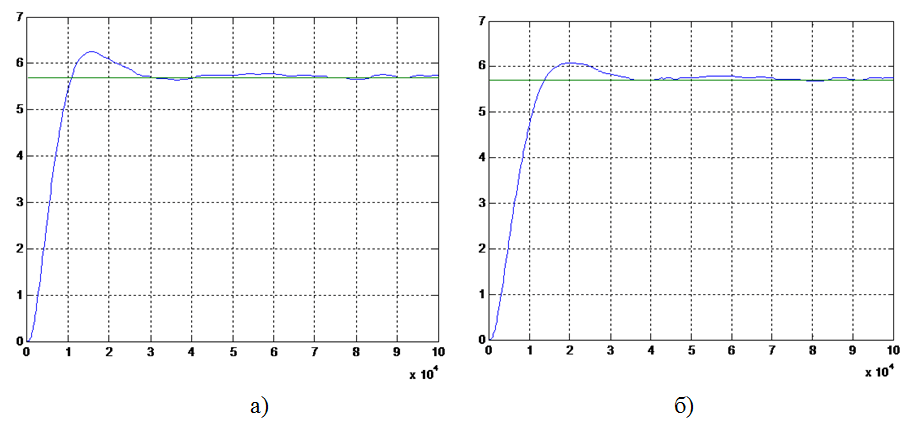
Рисунок 5 –Переходные характеристики концентрации кислорода при изменении kvar и давлении газа.
Таким образом при исследовании системы автоматического управления процессом качеством сгорания топлива в условиях парового котла котельной выяснено что система робастна при изменении kvar от 0.0015 до 0.0019(см.рис.1) за счет изменения подачи газа от 3е3Па до 3.8е3Па .При этом время переходного процесса не выходит за допустимую границу и это соответствует требуемому 5700 с. Из этого следует что были выбраны правильные настройки ПИ-регулятора за счет блока CheckStepResponseCharacteristics.
Выводы.