Сравненительная характеристика регуляторов для системы поддержания уровня воды в резервуаре
S.Abirami1, Zahir hussain2 A. S, Saravana Muthu. D3, Aravind kumar. C. B4
Доцент кафедры приборостроения и управления, инженерный колледж Саранатан, Тричи
2,3,4Бакалавр,кафедра приборостроения и управления, инженерный колледж Саранатан, Тричи
Источник: Journal of Engineering Research and Applications ISSN : 2248-9622, Vol. 4, Issue 3(Version 1), March 2014, pp.341-344.
Перевод с английского: А.М. Быкова
Аннотация
Проанализирована модель первого порядка с транспортной задержкой в системе, управляемая ПИД (пропорционально-интегрально-дифференциальный), ПИ (пропорционально-интегральный) и MPC (управление с прогнозирующими моделями) регуляторами, с использованием программной среды разработки MATLAB. Исследование было проведено для системы поддержавающей требуемый уровнь воды в резервуаре как для MPC-регулятора, так и для традиционных методов управления. Результаты были сопоставлены с точки зрения времени нарастания, времени переходного процесса и перерегулирования. Традиционный ПИД-регулятор вырабатывает управляющее воздействие только при возникновении ошибки рассогласования, MPC-регулятор обеспечивает управляющее воздействие заранее. Целью данной статьи является изучить MPC стратегию, проанализировать и сравнить ее со стратегиями традиционных методов управления. Сравнивая ПИД и ПИ регуляторы с MPC регулятором в системе поддержания уровня воды выяснено, что качество системы с управлением прогнозирующими моделями лучше, нежели в системе с применением традиционных регуляторов.
Ключевые слова: управление процессом уровня, MATLAB, управление с прогнозирующими моделями (MPC), ПИД управление.
1.Введение
Быстрое развитие промышленности, требования к более высокому качеству продукции привело к проектированию более успешной стратегии управления, как в теории, так и на практике. Сегодня инженеры используют системы автоматизированного проектирования для моделирования, индефикации и оценки систем. Одним из таких программных инструментальных средств является MATLAB. Сегодня он становится незаминим для преподавания теории систем управления и ее применения. Используя такой пакет моделирования студенты могут легко корректировать различные параметры системы и визуально видеть работоспособность спроектированной ими системы. В этой статье описывается создание MPC-регулятора для модели первого порядка с запаздыванием в системе в среде MATLAB, а также сравниваются улучшенная стратегия управления с традиционной стратегией.
Сегодня существует множество промышленных процессов в которых необходимо контролировать и точно поддерживать заданный уровень жидкости. Данная система управления поддержания уровня жидкости в резервуаре широко применяется в различных областях промышленности. Таких как пищевой, атомной, химической, фармацевтической и других. Чаще всего используется традиционный метод управления для поддержания необходимого уровня – кассический метод ПИД-регулирование. В данной статье сравнивается управление с применением ПИД, ПИ регуляторов и улучшенная стратегия управления – управление с прогнозирующими моделями (MPC-регулятор) , основанная на Z-N методе.
2.Описание эксперемента
Технологическая установка состоит из резервуара для подачи воды, оснащенная насосом для циркуляции воды, датчиком уровня, устанавливающимся на прозрачный технологический резервуар. Поток воды в резервуаре контролируется пневматическим регулирующимся клапаном. Эти блоки вместе с необходимыми трубопроводами и штуцерами распологаются в верхней части установки. Блок управления процессом состоит из индикатора или микроконтроллер, выходного индикатора, блока питания для датчика уровеня, переключателя управления и т. д. Технологический параметр процесса контролируется по средствам компьютера или микропроцессорного контроллера, управляя потоком воды. Используемый здесь контроллер является контроллером прямого управления, поскольку при увеличении выхода контроллера увеличивает погрешность.
| Изделие | Характеристики |
| Код изделия | 313 313A |
| Вид управления | DDC SCADA |
| Блок управления | Сопряженный модуль управления с цифровым регулятором индикации преобразования АЦП/ЦАП |
| Интерфейс связи | RS232 |
| Уровень передачи | 4-20 мА |
| Преобразователь I/P | Вход 4-20 мА, выход 0.2-1 бар |
| Регулирующий клапан | Тип пневматический; размер: 1/4”, входной сигнал: 0.2-1 бар, характеристика: линейная |
| Расходомер | 10-100 литров/час |
| Насос | Мотор с мощностью меньше лошадиной силы, тип центробежный |
| Резервуар | Прозрачный, акриловый, с маштабной градуировкой 0-100% |
| Расходный резервуар | SS304 |
| Регулятор воздушного фильтра | Диапазон 0-2.5 кг\см2 |
| Манометр | Диапазон 0-2.5 г\см2; диапазон 0-7 кг\см2 |
| Общий размер | 440Ш×445Д×750В мм |
| Дополнение | Миникомпрессор |
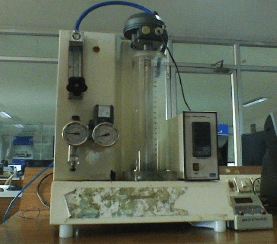
Рис. 1. Эксперементальная установка
Настройка ПИД-регулятора включает в себя подстройки коэффициентов регулирования Kp,Ki,Kd таким образом, чтобы достичь желаемого переходного процесса в системе.
Z-N Метод:
Стандартизация контроллера – это метод настройки параметров управления, таких как пропорциональная, интегральная и дифференциальная состовляющие. Данный метод требует соответствующего отклика на управляющее воздействие, вырабатываемое контроллером. Как правила, система должна быть устойчивой при воздействии на нее соответствующего управляющего воздействия, а процесс, протекающий в нем не должен колебаться при сочитаниии заданных параметров и уставки. Существует различное количество методов настройки ПИД-регулятора. Среди этих методов Z-N метод хорошо зарекомендовал себя. Этот метод является традиционным методом онлайн настройки парметров ПИД-регулятора, называемым методом Зиглера–Никольса. Метод Z-N определяет динамические характеристики замкнутого контура управления и оценивает параметры настройки регулятора, что дает желаемый отклик системы на динамические характеристики [12]. Параметры настроек метода Z-N приведены в таблице 1.
| Регулятор | Kc | Ki | Kd |
| Пропорциональный | 0.5ku | ||
| Интегральный | 0.45ku | Pu/1.2 | |
| Дифференциальная | 0.6ku | Pu/2 | Pu/8 |
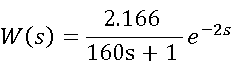
Метод Зиглера–Никольса более надежен так как не требует конкретной модели процесса. Передаточная функция поддержания воды в резервуаре, определенная при помощи Z-N метода:
3.Пропорционально–инрегральный (ПИ) регулятор
ПИ-регулятор устраняет вынужденные колебания и статическую ошибку в системе. Однако введение интегральной состовляющей может привести к нежелательным последствиям таким как уменьшение быстродействия и неустойчивости в системе. Таким образом, ПИ-регулятор не увеличивает быстродействие системы, а также он не может предсказать что произойдет с сигналом рассогласования в ближайшем будущем [2]. Такую задачу можно решить включив дифференциальную состовляющую, которая поможет предсказать, что произойдет с ошибкой в ближайшее время и тем самым увеличит быстродействие реакции регулятора. ПИ-регулятор чаще всего используется в промышленности, когда быстродействие в системе не является основной задачей для решения.
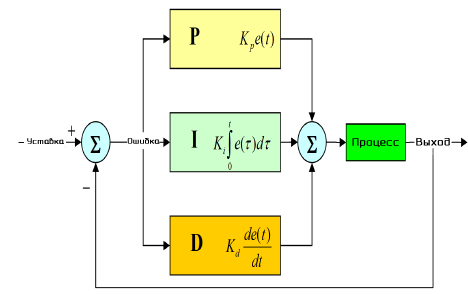
Рис.2 Блок-диаграмма ПИД регулятора
4.Пропорционально–инрегрально–дифференциальный (ПИД) регулятор
ПИД-регуляторы широко используются в промышленных процесса и в промышленности благодаря эффективности и простоте в использовании[2]. Сложные промышленные системы управления используя сетевое управление в которых главным блоком управления чаще всего является ПИД-регулятор. ПИД-регулятор удачно используется как в непрерывных процессах так и в дискретных. Такой тип регулятора еще называют регулятор обратной связи, чей выход – управляющая переменная основывается на ошибке между уставкой и измеряемой переменной.
5.Управление с прогнозирующими моделями (MPC)
Управление с прогнозирующими моделями – это предварительный метод управления процессом, который используется в химической, нефтеперерабатывающей, нефтехимической отраслях производства [11]. MPC-регуляторы в основном используют линейные эмпирические динамические модели процесса, полученные путем идентификации системы. Управление с прогнозирующими моделями относятся к классу компьютерных управляющих алгоримов, использующих точную модель процесса для предсказания будущей реакции объекта [11]. На каждом интервале управления алгорим MPC пытается оптимизировать будущее поведение объекта, путем вычисления корректированных будущих последовательностей управляющей переменной. Первый интервал управления оптимальной последовательности подается на объект, далее весь расчет управляющей величины на следующем интервале управления повторяется заново.
Управление с прогнозирующими моделями – это метод который ориентируется на построении контроллеров, которые вырабатывают управляющее воздействие до того как произойдет изменение выходной величины. Это упреждение в сочетании с принципом управления по отклонению с отрицательной обратной связью позволяют регулятору вносить корректировку таким образом, что управляющее воздействие близко к оптимальному. MPC решает задачу оптимизации на временном шаге k. Основная задача оптимизации заключается в вычислении нового вектора управления и в тоже время учет накладываемых ограничений. Алгоритм MPC состоит из функции стоимости,ограничений и самой модели процесса [11].
Ключем к успешному созданию MPC является хорошо подобранная модель объекта управления. Индефикация таких моделей является трудоемкой задачей в проектировании MPC.
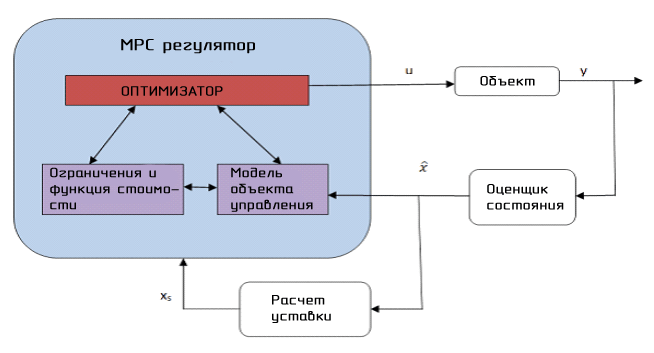
Рис.3 Структура MPC регулятора
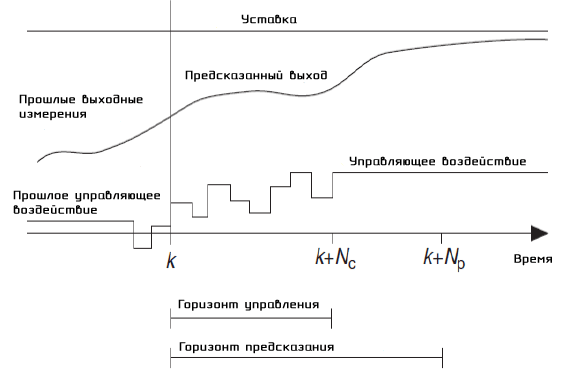
Рис.4 Горизон предсказания и горизонт управления
MPC-регулятор предсказывает выходной сигнал от времени k до k+Np. Из рис.4 видно, что управляющее воздействие не изменяется после окончания горизонта управления. Первый интеравал управления в оптимальной последовательности подается на объект управления и весь расчет повторяется занова при последующих интервалах управления. С каждой итерацией горизонт предсказания движется вперед по временной оси, таким образом MPC-регулятор заново предсказывает выходную величену.
6.Результаты и обсуждения
Как говорилось ранее блок моделирования системы поддержания уровня воды в резервуаре реализован в среде MATLAB с использованием трех регуляторов – ПИ, ПИД, MPC. Переходные характеристики выхода модели с разными регуляторами оказались разными. Управляющие воздействия регулятора использованы для дальнейшего анализа. Характеристики параметров ПИД-регулятора приведены в таблице 2.
| Параметры ПИД-регулятора | Время нарастания | Перерегулирование | Время переходного процесса | Устойчивость |
| Kp | уменьшается | увеличивается | мало изменяется | снижается |
| Ki | уменьшается | увеличивается | увеличивается | снижается |
| Kd | небольшое уменьшение | уменьшается | уменьшается | мало изменяется |
Для наглядного представления параметров переходных процессов таких как время нарастания, % перерегулирование и время переходного процесса представим их в виде таблицы (таб.3). Результаты показывают, что MPC-регулятор обладает меньшим временем нарастания и временем переходного процесса и перерегулированием в отличии от ПИ и ПИД регуляторов.
| Показатели качества | ПИ | ПИД | MPC |
| Время нарастания, сек | 4.50 | 6 | 3.94 |
| Время переходного процесса | 44.20 | 43.5 | 35.6 |
| Перерегулирование | 75.78 | 63.25 | 38.71 |
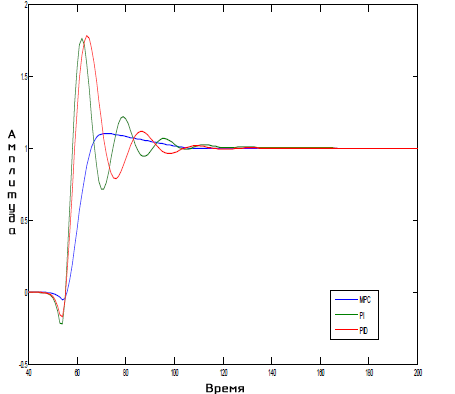
Рис.5 Переходные характеристики системы
7.Выводы
Эта статья описывает моделирование системы с прогнозом. Когда используется ПИД-регулятор в системе, то управляющее воздействие контролирует текущие переменные, тогда как MPC-регулятор управляет как текущими переменными, так и будущими параметрами. Использование MPC-регулятора в значительной степени повышает работоспособность ситемы. Полученные результаты моделирования используются для модификации в промышленности системы InControl для оптимального управления. Будущее данной стратегии успешно из-за ее широкого применения в данное время в промышленных процессах. По переходным процессам (рис.4) видно, что время переходного процесса, время нарастания, перерегулирование, статическая ошибка в MPC-регуляторе меньше нежели в традиционных ПИ и ПИД регуляторах.
Ссылки
- Kala H. System Identification and Comparison of Ziegler-Nichols and Genetic Algorithm for Moisture Process / H. Kala, S. Abirami, S.M. Giriraj Kumar.
- Википедия – свободная энциклопедия: ПИД-регулятор [Электронный ресурс] – Режим доступа: https://ru.wikipedia.org/wiki/ПИД-регулятор.
- Ziegler J.B. Optimum settings for automatic controllers / J.B. Ziegler, N.B. Nichols // ASME Transactions. – 1942. – v64. – pp. 759-768.
- Rawlings J.B. Tutorial Overview of Model Predictive Control / J.B. Rawlings // Control System Magazine / IEEE. – New Jersey, June 2000.
- Википедия – свободная энциклопедия: Управление с прогнозирующими моделями [Электронный ресурс] – Режим доступа: https://ru.wikipedia.org/wiki/Управление_с_прогнозирующими_моделями.
- Model Identification and Comparison Of Different Controllers for Humidity Process / H. Kala, S. Abirami, S. Muthumari, S. Venkatesh / International Conference on Electrical Sciences. – 2012.
- Mercy D. Tuning of controllers for nonlinear process using Intelligent techniques / D. Mercy, S. M. Giriraj kumar // IJAREEIE. – September 2013. – Vol. 2. – Issue 9.
- Morari M. Model Predictive Control: Past, Present and Future / M. Morari, J. Lee // Comp. Chem. Eng. – 1999. – 21. – pp. 667-682.
- Stephanopoulos G. Chemical Process Control: An Introduction to Theory and Practice / G. Stephanopoulos. – NJ: Prentice Hall, 1984.
- Balaji Dr. V. Study of Model Predictive Control using NI Lab VIEW / Dr. V. Balaji // International Journal of Engineering Research & Technology. – July-December 2012. – Volume 3. – pp.257-266.
- Dwyer A. Hand book of PI and PID controller tuning rules, 3rd edition / A. Dwyer.