Введение
Разработка и совершенствование систем весового дозирования сыпучих материалов является одной из актуальных задач при производстве строительных материалов и ведется с целью повышения производительности при обеспечении заданной точности дозирования. Широко распространен двухскоростной способ весового дозирования, при котором подача основной порции материала в весоизмерительный бункер осуществляется на одной скорости, а при приближении к заданному весу порции происходит переход на пониженную скорость подачи – досыпку материала.
Основной материал исследования
В настоящее время известны работы посвященные созданию и исследованию математических моделей электропривода [1], информационных моделей в АСУ [2], и др. Модель дозирования сыпучих компонентов [3], не описывает в полной мере динамику процесса. Данная работа посвящена разработке модели процесса дозирования учитывающей инерцию электропривода питателя и вращающихся масс, нелинейно изменяющееся время падения материала в бункер. Использование такой модели позволяет оптимизировать параметры работы дозатора для достижения максимальной производительности при обеспечении требуемой точности.
Система дозирования состоит из шнекового дозатора с асинхронным двигателем (АД), управляемым тиристорным преобразователем путем изменения частоты и величины питающего напряжения, и весоизмерительного бункера. Материал в бункер попадает с задержкой, определяемой временем падения. Высота падения а, следовательно, время падения меняются в процессе дозирования из-за повышения уровня материала по мере заполнения бункера. При таких условиях анализ динамических свойств системы удобно выполнять, используя методы математического моделирования с применением пакета MATLAB 6.5 - Simulink. [4, 5].
Модель процесса дозирования учитывающая динамику электропривода питателя, нелинейно изменяющееся время падения материала в бункер приведена на рис. 1:
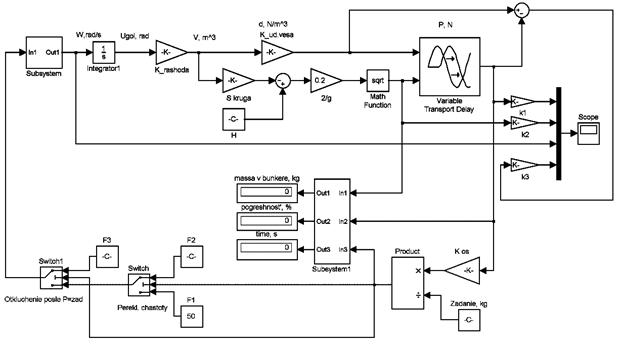
Рисунок 1 – Модель дозатора, реализованная в среде MATLAB 6.5
В ходе моделирования были варьированы две переменные: момент перехода на пониженную скорость досыпки материала, определяемый в процентном отношении к массе требуемой порции и уровень снижения скорости привода питателя выражаемый в процентном отношении к скорости привода в процессе основной подачи материала.
Переходные процессы при моделировании в среде MATLAB 6.5 изображены на рис. 2:
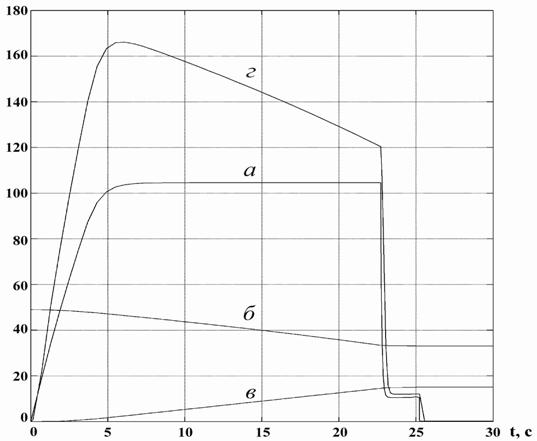
Рисунок 2 – Угловая скорость вращения шнека, рад/с (а); время падения материала, х10 -3 с (б); масса материала в бункере, х10 2 кг (в) и массы падающего столба, х0,1 кг (г) при моделировании.
Анализ результатов моделирования показал, что для заданных параметров шнекового питателя и электропривода оптимальными по быстродействию, а, следовательно, и обеспечивающие максимальную производительность при заданной точности дозирования, являются:
- переход на пониженную скорость дозирования (досыпки) при достижении 98% требуемой дозы;
- уровень снижения скорости досыпки составляет 6% от основной скорости дозирования.
Выводы:
Выполненные исследования процесса дозирования позволяют оптимизировать двухскоростной способ весового дозирования - обеспечить максимальную производительность при заданной точности.
Разработанная модель весового дозатора позволяет на стадии проектирования оценить влияния характеристик оборудования на погрешность и производительность процесса дискретного весового дозирования.
Для конкретного оборудования, учитывающего параметры весоизмерительного бункера, характеристики двигателя питателя получены значения момента перехода на пониженную скорость и уровень снижения скорости обеспечивающие максимальную производительность дозирования при заданной погрешности, что позволяет оптимизировать процесс дозирования по предлагаемой методике.
Литература
1. Довгань С.М. Дослідження систем електропривода методами математичного моделювання: Навчальний посібник. – Дніпропетровськ. НГА України, 2001. – 137 с.
2. Краснопрошина А.А. и др. Современный анализ систем управления с применением Matlab. 1999.
3. В.Букреев, Н.Гусев, М.Нечаев, И.Краснов, и др. АСУ ТП производства комбикормов на базе контроллера Fastwel RTU1&8-BS
. Современные технологии автоматизации, №1 2006.
4. Дьяконов В. Simulink 4. Специальный справочник СПб, Питер, 2002 г., 528 с.
5. Егоренков Д.Л., Фрадков А.Л., Харламов И.Ю. Основы математического моделирования. Построение и анализ моделей с примерами на языке MATLAB.