
Abstract
Content
- Introduction
- 1. Theme urgency
- 2. Goal and tasks of the research
- 3.Take-off methods
- 4.Landing of the UAV
- 5. The return of the UAV
- Conclusion
- References
Introduction
Aviation unmanned systems are now widely used. Unmanned aerial vehicles will help solve a wide range of scientific and applied problems related to geology, ecology, meteorology, zoology, agriculture, climate studies, mineral exploration, etc. They can monitor the migration of birds, mammals, schools of fish, changes in weather conditions and ice conditions on rivers, the movement of ships, the movement of transport and people,conduct aerial survey, photography and filming, radar and radiation reconnaissance.[10]
1. Theme urgency
Unmanned aerial vehicles are gaining increasing popularity and are used in various fields of activity, in different climatic conditions, and solve a variety of tasks. To begin, you need to launch the UAV, then successfully return it, and land (considered UAVs of aircraft type). The methods of take-off and landing of unmanned vehicles have known. Their advantages and disadvantages have known too. Until an ideal system is created, the relevance of this topic will have weight.
2. Goal and tasks of the research
At the moment, in the public domain there is a lot of literature and articles devoted to unmanned aircraft systems. However, only small part of them contained information on the take-off and landing UAV. In the process of writing a master's dissertation, I have found and studied such works:
In the book [1] will be considered a model describing different types of the start, takeoff and landing UAVs in the absence and presence of wind disturbances, which presented in arbitrary velocity vector of the current of the wind. In the description of the processes start, take-off and landing UAV along with the original mathematical models are used model. Many articles devoted to the takeoff and landing of the UAV reference this book.
In [2], based on functional analysis of existing designs of starting devices unmanned aerial vehicles with the guides the necessity of the development of the starting device of rational design using rubber shock absorbers. The algorithm of calculation method for the numerical integration of the components of the process of acceleration of the aircraft triggering device of the proposed design. Describes the structure and operation of structural elements two-corded rubber catapult, as well as requirements for the aircraft for catapult construction. On the basis of the calculations and test runs of the recommendation on the use of starting devices of similar design.
There is also some number of articles in the Internet dedicated to the subject of take-off and landing UAV.
3. Take-off methods
At the moment, apply such UAV take-off methods
- starting from hands;
- starting from the catapult;
- starting from the runway.
From the runway in the main starting UAVs which weigh hundreds of pounds and tons, besides you must have the runway.
For takeoff small UAVs are widely used starting device of a type of catapult, which allowed the fast and effective take-off these aircraft with the power plant of relatively small power.
Taking off from the catapult is the most popular starting system of the UAV. Because the work of the UAV occurs mainly in areas unequipped runway. Running the model of the airframe of the UAV is to catapult various systems and methods for obtaining a starting energy. Select the type of the catapult depends on the mass of the UAV requirements for the runway area and time preparation for takeoff and the restriction of power impact to launch the UAV.
Catapults can be:
- pneumatic;
- rubber.
To launch models UAV weighing more than 15 to 50 kilograms, typically use pneumatic or mechanical catapult. Pneumatic catapult has relatively small overall dimensions and weight. The same advantage is using in winter. Mechanical catapults can use the energy of the falling load, winch drive or other devices. Pneumatic catapult dispersed UAV through the dense air.[3]
The most common in class of models of UAVs are elastic ejection system. The principle of their work lies the power resulting depreciation of the rubber cord. Design of a catapult is modular, which allows to reduce overall dimensions in the transport state and for rapid assembly on site. Basic requirements: reliability, which is the efficiency of the mechanism in different climatic conditions, exclusion of damage to expensive aircraft, the reliability of launch; the ergonomics associated with the minimization of mass-dimensional characteristics, ease of use, minimal deployment time and clotting; high performance, namely, durability, maintainability, suitability for recycling.
Figure 1 – Two-cord rubber catapult for launching an unmanned aerial vehicle[2] (animation: 5 frames, 6 cycles, 51 kbytes)
Known methods of take-off small drones with catapults, equipped with a trolley that is moved by the upper stage unit, along the guides, generally, can be described as follows. Before you start using the docking device of the aircraft attached to the truck, located on the catapult in the starting position, and after its acceleration by any method to the required speed of the aircraft is detached from the truck, and the truck stop. Launching an UAV model with physical strength, without specialized devices is carried out at a weight of model less than 5kg. the Main advantage is seen from the title, but at the same time, the main disadvantage lies in the safety, at the start, the UAV turn on full engine power and you can hold it back.
4.Landing of the UAV
Landing on the parachute/airbag An obvious advantage of the parachute is a fairly soft landing, with the soft condition of the underlying surface. But then immediately gets out and minus. Firstly, the extra weight, and secondly, when triggered the parachute, the UAV stops and its flight depends on the wind. If the parachute opens at an altitude of 100 metres at a wind speed of 14m/s, the machine can carry out a kilometer from the intended landing point. This fact restricts the use of the UAV with parachute system at some objects. If the parachute after landing is not shooting, he can inflate and drag the aircraft on the ground, which can lead to breakdowns. Large unmanned vehicles (over 15kg), have an airbag, which softens the blow when landing, it allows you to make a parachute landing faster, without fear for the plane.
Landing on the body
It possible with low weight and necessary rigidity. Such systems are well operated on a strong windy objects. When approaching the landing point, the UAV turn on a reverse motor and take the case directly to the designated point, regardless of wind speed.Landing on the body It possible with low weight and necessary rigidity. Such systems are well operated on a strong windy objects. When approaching the landing point, the UAV turn on a reverse motor and take the case directly to the designated point, regardless of wind speed.
Method of landing on the arresting gear.(for large machines).[7]
The method consists in the fact that landing mode in the flight path of the aircraft is formed that the engagement is for receiving section of wire has occurred during the flight or after the flight over this area, after that turn off the engine and as much as possible inhibit the aircraft to the given speed, thus handling the issue of the receiving cable. Thus for a given range of speeds of landing in the valid conditions of each specific aircraft type characteristics of the system, exciting the cable are determined so that the width covered by a flexible leash swath was no less precise control of the height of the flight path of the jet. After gearing for receiving the cable of the first cascade of arresting gear is an intensive absorption of the kinetic energy of the aircraft through the action of a concentrated force on the load-bearing element of his constructive-power circuits. Then the second cascade of arresting gear that is paired with the first, decelerate the UAV to the full stop at the expense of the distributed force on the surface of the damping elements of this cascade. The technical result is aimed at improving the efficiency of operational properties of an unmanned aerial vehicle
Landing method on catching web.[5]
In this method carry out landing UAV in catching web, and form a circular zone approach, for which at the predetermined point landing set non-directional source of radio emission and on-board UAV establish direction finder, perform autonomous enter UAV in the area of the landing, using standard on-Board navigation equipment, produce the signals from the non-directional reception of the radio source and perform its angular support in horizontal and vertical planes on-board radio direction finder, according to which using the on-board control system form a team homing BLAH to the source of radio emission in the horizontal plane. At the same time, perform self-homing UAV to the source of radio emission in the horizontal plane, and the flight of the UAV at a given height, upon reaching a given angle of sight of the radio source in the vertical plane move UAV into a dive, according to the on-board radio direction finder using the onboard control system form an operation self-homing UAV to the source of radio emission in the vertical plane, perform self-homing UAV to the source of radio emission in the vertical and horizontal planes before getting into catching web, installed horizontally above the radio source.
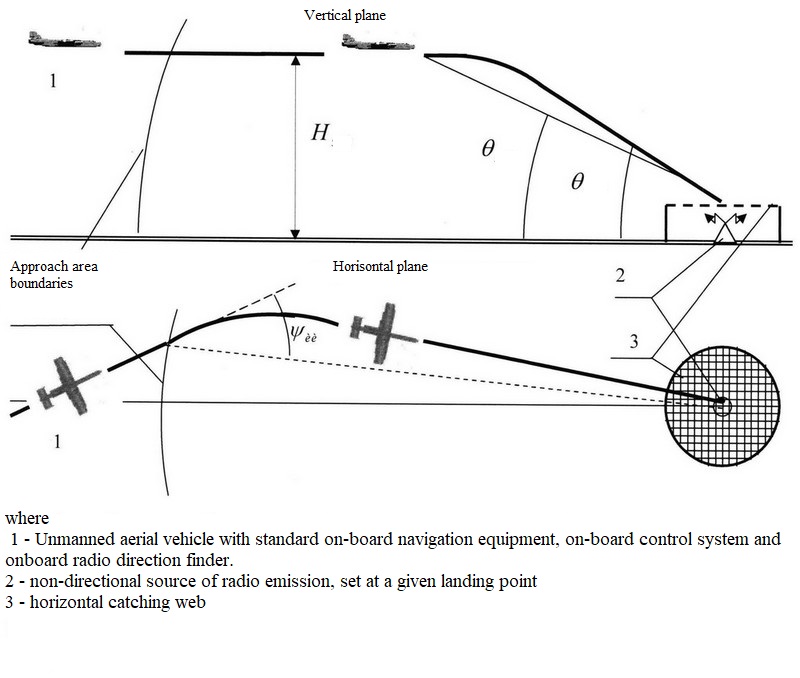
Figure 2 – Landing method on catching web
5. The return of the UAV
The return of the unmanned aerial vehicle is carried out using a flight controller.[9] namely, the function - Auto Return To Launch Mode (RTL) - installation using failsafe upon loss of signal. The plane will be automatically returned to base. Upon reaching initial point the system will initiate auto circling over this place.
Conclusion
Everything goes to the fact that unmanned aviation is the future, due to application in various fields. This saves a lot of resources. Various auxiliary systems will not stand still in its development, such as takeoff and landing. Until you create the perfect tool, eliminating all the shortcomings of the existing ones. At the moment, is the modeling of systems take-off in the software product Comsol.
This master's work is not completed yet. Final completion: May 2018. The full text of the work and materials on the topic can be obtained from the author or his head after this date.
References
- Моисеев В.С. Прикладная теория управления беспилотными летательными аппаратами: монография./ В.С. Моисеев – Казань: ГБУ «Республиканский центр мониторинга качества образования» (Серия «Современная прикладная математика и информатика»), 2013 – 768 с.
- И.В. Калужинов Двухшнуровая резиновая катапульта для запуска в полет беспилотного летательного аппарата / И.В. Калужников, В.А. Яценко - Открытые информационные и компьютерные интегрированные технологии. Сборник научных трудов: Национальный аэрокосмический университет им. Н.Е. Жуковского "Харьковский авиационный институт" № 51, 2011, с.75-82
- Аленченков Г.С. Стартовые устройства беспилотных летательных аппаратов, применяемых для мониторинга объектов сельского хозяйства – [Электронный ресурс]. Режим доступа: Botaniks.ru
- Российские и зарубежные беспилотники (БПЛА). – [Электронный ресурс]. Режим доступа: MILITARYARMS.RU
- Способ точной посадки беспилотного летательного аппарата. – [Электронный ресурс]. Режим доступа: findpatent.ru
- Выбор технических характеристик беспилотных летательных систем для решения задач картографирования. - [Электронный ресурс]. Режим доступа: http://wiki.gis-lab.info
- Cпособ посадки беспилотного самолета на аэрофинишер. – [Электронный ресурс]. Режим доступа: findpatent.ru
- Принципы выбора беспилотника под Ваши задачи. – [Электронный ресурс]. Режим доступа: съемкасвоздуха.рф
- RTL Mode (Return To Launch). – [Электронный ресурс]. Режим доступа: ardupilot.org
- Беспилотные самолеты. – [Электронный ресурс]. Режим доступа: transpobrand.ru