
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження
- 3. Огляд системи зв'язку
- 4. Огляд радіомодулю для створення системи зв'язку
- Висновки
- Перелік джерел
Вступ
Стрімкий розвиток систем безпілотних літальних апаратів (БПЛА) і розвиток радіоелектроніки змушують постійно переглядати вимоги до каналу зв'язку та наземниъ комплексів управління (НКУ). На сьогоднішній день стало можливим управління автопілотом при повній відсутності зв'язку між бортом літального апарату і наземним комплексом управління. Тим не менш, це не говорить про те, що радіолінія зв'язку може бути виключена зі складу БПЛА. Через надзвичайну складність і самої вартості комплексу, при його експлуатації, потрібен постійний контроль за станом літальних апаратів які знаходяться в повітрі. Крім того, іноді виникає необхідність коригування параметрів польоту БПЛА.
1. Актуальність теми
Розробка БПЛА - одне із найбільш перспективних напрямків розвитку сучасної авіації [1]. Безпілотники все більше набирають популярність. Їх використовують для аерофотозйомки, патрулювання, геодезичних вишукувань, моніторингу різних об'єктів, підтримка пошуково-рятувальних операцій, охорона кордонів приватної власності і навіть для доставки покупок додому. Всі ці завдання можуть вирішуватися безпілотними апаратами цілодобово практично в будь-яких погодних умовах і без ризику для життя людини [7].
Можливість забезпечення стійкого зв'язку є однією з найважливіших характеристик, що визначають експлуатаційні можливості комплексу управління БПЛА і забезпечує доведення відомостей, отриманих БПЛА, в режимі «реального часу» до оперативного персоналу [1]. Крім цього, актуальним завданням також є передача даних корисного навантаження літального апарату на НКУ. В цьому випадку потрібно надати передачу великого обсягу даних при заданих вимогах по смузі пропускання, ймовірності бітової помилки та ін.
2. Мета і задачі дослідження та заплановані результати
Метою даної дисертації є дослідження і пошук нових можливостей впровадження системи зв'язку БПЛА для використання на промислових об'єктах.
Для досягнення результатів були визначені наступні завдання:
- загальний аналіз систем зв'язку;
- вибір апаратного забезпечення і середовища моделювання;
- моделювання системи зв'язку;
- тестування отриманої системи та її аналіз;
- усунення та зведення до мінімуму отриманих похибок.
Основні проблеми при вирішенні поставлених завдань:
- вибір радіомодуля і частотного діапазону;
- мала швидкість передачі даних;
- дозвіл на використання повітряного простору та частотного діапазону.
3. Огляд системи зв'язку
Багато сучасних комплексів БПЛА вимагають наявності високошвидкісних ліній передачі даних для виконання поставлених завдань [2]. Поширена на сьогоднішній день технологія передачі інформації полягає в безперервній трансляції зображення під час його надходження в цифровому або аналоговому форматі, структура якого не змінюється протягом усього польоту.
Необхідно врахувати, що безперервна трансляція зображень має такі особливості:
- можливість візуальної відсутності шуканих ознак;
- можливість отримання неправдивої інформації;
- можливість виявлення БПЛА і його злом, через постійне випромінювання сигналу.
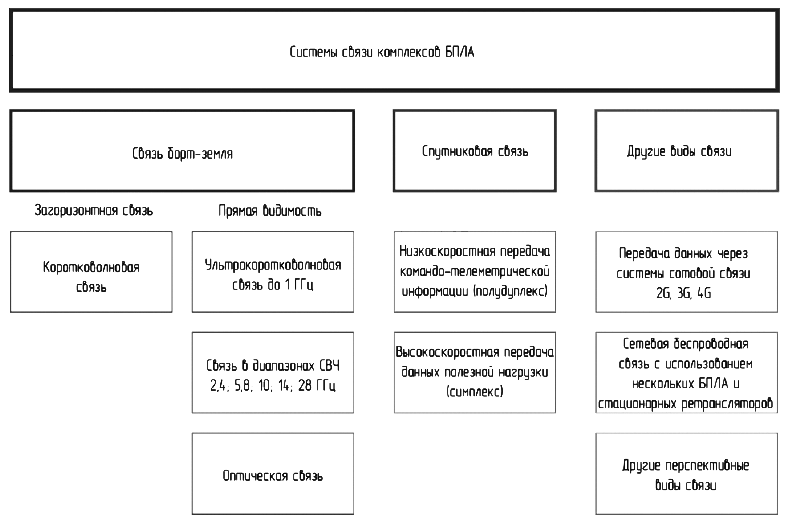
Як правило, на борту БПЛА є як мінімум дві системи зв'язку: дуплексна/напівдуплексна апаратура служить для передачі командно-телеметричної інформації та симплексна система - передачі інформації корисного навантаження [3]. Передача командно-телеметричної інформації з НКУ на борт БПЛА проводиться за часту на низькій швидкості, так само, як і передача телеметричної інформації з борту БПЛА на НКУ. Апаратура передачі інформації корисного навантаження призначена для односторонньої високошвидкісної передачі інформації корисного навантаження з борта БПЛА на ПКУ. На рис. 1 показані можливі варіанти реалізації систем зв'язку комплексів БПЛА [3].
Для забезпечення зв'язку на значні відстані і підвищення помехозахищеності за рахунок просторової селекції в комплексах управління БПЛА широко використовуються гостронаправлені антенні системи [4].
4. Обзор радиомодуля для создания системы связи
В даний час на ринку надано великий вибір радіомодулів здатних забезпечити вирішення завдань, які нас цікавлять. Далі буде розглянуто один з модулів, який і пропонується для досягнення поставленої мети.
Для забезпечення зв'язку безпілотника з НКУ буде використовуватися технологія LoRaWAN (Long Range Wide Area Networks). LoRaWAN - це відкритий енергоефективний мережевий протокол зв'язку, що забезпечує значну перевагу перед Wi-Fi і сотовими мережами завдяки можливості розгортання міжмашинної комунікації. На основі цього протоколу створений простий у використанні апаратно-програмний комплект, що дозволяє створювати системи з можливістю бездротової передачі даних [5].
Швидкість передачі даних по протоколу LoRaWAN в системі LoRa лежить в діапазоні 0,3 - 11 кбіт/с. Для Європи доступний один GFSK-канал (Gaussian Frequency-Shift Keying, GFSK) для передачі інформації з підтікання даних в 50 кбіт/с. У Північній Америці через обмеження, що накладаються FCC (Federal Communications Commission - Федеральна комісія з електрозв'язку США), мінімальна швидкість передачі даних становить 0,9 кбіт/с, але крайовий чіп або так званий PHY (інтегральна схема, призначена для виконання функцій фізичного рівня мережевої моделі OSI) здатний надати більше варіантів. Так, ІМС SX1272 підтримує швидкість передачі даних від 0,3 до 37,5 кбіт/с, а SX1276 - від 0,018 до 37,5 кбіт/с [5].
Щоб продовжити термін служби батареї/акумулятора в кінцевому пристрої і загальну пропускну здатність мережі, мережевий сервер LoRaWAN управляє швидкістю передачі даних і радіочастотним виходом кожного кінцевого пристрою окремо [5]. Управління здійснюється за допомогою алгоритму адаптивної швидкістю передачі даних (Adaptive Data Rate, ADR) [5]. Це має вирішальне значення для високої продуктивності мережі і дозволяє здійснювати її необхідну масштабованість. Мережа може бути розгорнута з мінімальними інвестиціями в її інфраструктуру і з тієї її ємністю, яка необхідна для даного конкретного застосування. Якщо розгорнуто багато шлюзів, то технологія ADR буде зміщувати швидкість передачі даних в сторону підвищення, що забезпечить масштабування ємності мережі в межах від 6 до 8 разів [5].
Адаптивна швидкість передачі даних (ADR) являє собою метод, при якому фактична швидкість передачі даних регулюється таким чином, щоб забезпечити надійну доставку пакетів даних, забезпечити оптимальну продуктивність мережі і необхідний масштаб для її завантаження. Так, наприклад, вузли, ближчі до шлюзу, будуть використовувати і більш високу швидкість передачі даних (отже, час активної передачі по радіоканалу скоротиться) і меншу вихідну потужність [6]. Тільки найвіддаленіші вузли будуть використовувати низьку швидкість передачі даних і високу вихідну потужність передавача. Технологія ADR може внести необхідні зміни в мережеву інфраструктуру і компенсувати таким чином різні втрати на трасі передачі сигналу. Щоб збільшити термін служби батареї кінцевих пристроїв і загальну пропускну здатність мережі, мережева інфраструктура LoRa управляє швидкістю передачі даних, а радіочастотний вихід підлаштовується за допомогою використання технології ADR для кожного кінцевого пристрою індивідуально.
Технологія LoRa значно підвищує чутливість приймача і, аналогічно іншим методам модуляції з розширеним спектром, використовує всю ширину смуги пропускання каналу для передачі сигналу, що робить його стійким до канальних шумів і нечутливим до зсувів, викликаних неточностями в налаштуванні частот при використанні недорогих опорних кварцових резонаторів. Модем LoRa на суміщеному GMSK-каналі має можливість придушення перешкод до 19,5 дБ (за рахунок гаусової фільтрації). Говорячи іншими словами, він може приймати і демодулировать сигнали на 19,5 дБ нижче рівня перешкод або шумів. Цей імунітет до перешкод дозволяє використовувати просту і недорогу систему з LoRa модуляцією в тих місцях, де є важка спектральна обстановка, або в гібридних системах зв'язку. У цих випадках використання технології LoRa дозволяє розширити діапазон покриття зв'язку, в той час як інші варіанти модуляції тут виявляються безсилими.
Вихідна потужність безпосередньо на виході чіпа дорівнює +20 дБм, а на антені, після узгодження та фільтрації, в результаті неминучих втрат вона становить вже +19 дБм ± 0,5 дБ. Різні держави і навіть їх регіони мають різні правила для максимально допустимої потужності. Щоб досягти дозволеного максимуму і, відповідно, максимальної зони покриття, протокол LoRaWAN дозволяє встановити різні значення вихідної потужності, прийняті для різних місць використання системи [5].
Завдяки своїй високій чутливості технологія LoRa підходить до пристроїв з вимогами низького споживання енергії і високої стійкості зв'язку на великих відстанях.
 Рис. 2 – Зв'язок між ПКУ і БПЛА за допомогою протоколу LoRa
Рис. 2 – Зв'язок між ПКУ і БПЛА за допомогою протоколу LoRa(анімація: 11 кадрів, 7 циклів повторювання, 29 кілобайт).
Висновки
Таким чином, впроваджена система зв'язку, на основі протоколу LoRaWAN, зможе забезпечити великий радіус зв'язку з безпілотником і надасть безперервну передачу великих обсягів даних.
На поточному етапі дослідження отримані наступні результати:
- досліджені різні види і способи зв'язку БПЛА, вивчені їх переваги і недоліки;
- обрані комплектуючі для створення системи зв'язку;
- визначені доступні частотні діапазони.
Подальші дослідження направлені на наступні аспекти:
- Якісне вдосконалення запропонованого підходу до уніфікації синтезу автоматів Мура, його доповнення та розширення.
- Визначення границь ефективності різних варіантів основних етапів уніфікованого процесу синтезу автоматів Мура.
- Адаптація відомих методів побудови логічних схем автоматів Мура до базису FPGA.
- Розробка кросплатформової і функціональної системи автоматизованого проектування автоматів Мура (САПРАМ), що реалізує запропонований уніфікований процес синтезу.
При написанні даного реферату магістерська дисертація ще не завершена. Остаточне завершення: травень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік джерел
- Антонов О. Е. Настоящее и будущее БПЛА [Электронный ресурс] // Режим доступа: http://flot.com/...
- Боев Н.М. Анализ командно-телеметрической радиолинии связи с беспилотными летательными аппаратами // Вестник Сибирского государственного аэрокосмического университета им. акад. М.Ф. Решетнева. – 2012. – Вып. 2 (42). – С. 86-91.
- Боев Н.М. Адаптивное изменение параметров цифровых систем связи комплексов беспилотных летательных аппаратов // 22-я Международная Крымская конференция "СВЧ-техника и телекоммуникационные технологии", 10–14 сент., 2012 г.: Материалы конф.: в 2 т. – Т. 1.
- Самарский А.А., Гулин А.В. Численные методы: Учеб. пособие для вузов. – М.: Наука. Гл. ред. физ-мат. лит., 1989. – 432 с.
- lora-alliance [Электронный ресурс]: LoRaWAN For Developers – электронные данные, – режим доступа https://www.lora-alliance.org/ – дата доступа: ноябрь 2017.
- MIT Technology Review [Электронный ресурс]: Six Ways Drones Are Revolutionizing Agriculture – электронные данные, – режим доступа https://www.technologyreview.com/ – дата доступа: ноябрь 2017.
- ZALA AERO GROUP [Электронный ресурс]: Применение беспилотников (беспилотных летательных аппаратов, БПЛА) – электронные данные, – режим доступа http://zala.aero/primenenie/