Аннотация
Приведен перечень возможных задач, которые могут решаться телематическими транспортными системами. Показана целесообразность создания интегрированной системы указанного типа. Для решения проблемы оптимизации использования ограниченного ресурса общего пользования, каковым является пропускная способность.
Введем следующие определения.
Телематическая транспортная система (ТТС) – это информационная система, обеспечивающая автоматизированный сбор, обработку, передачу и представление потребителям данных о местоположении и состоянии транспортных средств, а также информации, получаемой на основе этих данных, в целях эффективного и безопасного использования транспортных средств различного назначения и принадлежности.
Интеллектуальная транспортная система (ИТС) – это телематическая транспортная система, обеспечивающая реализацию функций высокой сложности по обработке информации и выработке оптимальных (рациональных) решений и управляющих воздействий. Различия систем указанных классов отмечается, например, в [1], где указывается следующее.
До настоящего времени отсутствует единое представление о том, что такое интеллектуальные транспортные системы.
Во многих публикациях и выступлениях они в той или иной степени отождествляются с обычными автоматизированными транспортными системами.
Важной особенностью ИТС, позволяющей выделить такие системы в отдельный класс и даже в отдельное направление исследований в железнодорожной
науке, является формальный логико-математический инструментарий, используемый для решения задач с позиций общесистемного подхода к анализу
и управлению всеми системами и процессами на железнодорожном транспорте.
Очевидно, что вышеприведенные рассуждения справедливы не только
для железнодорожного, но и для других видов транспорта, в частности, автомобильного.
С помощью ТТС могут решаться, в частности, следующие задачи:
- взимание платы за проезд транспортных средств по дорогам (участкам улично–дорожной сети), на которых установлена такая плата;
- дистанционный контроль и надзор при осуществлении перевозок опасных и ценных грузов;
- контроль времени работы и отдыха водителей и пресечение нарушений установленного режима;
- обеспечение транспортной безопасности ТС, находящихся в рейсе;
- управление системами (группами) ТС, например, автотранспортом оперативных служб, дорожно-эксплуатационных и коммунальных организаций, грузовых и пассажирских автопредприятий, таксопарками и т. д.;
- формирование оптимальных (рациональных) маршрутов движения ТС, сообщивших пункты своего назначения, и прогнозирование продолжительности поездки;
- оптимальное управление дорожным движением;
- информирование пользователей ТТС (водителей и пассажиров);
- экстренное реагирование на аварийные ситуации;
- розыск угнанных ТС;
- использование поступающих в ТТС данных о транспортных средствах для решения задач правоохранительных органов.
Несложно показать, что создание отдельных систем для решения каждой из перечисленных задач ведет к значительным нерациональным затратам времени и средств за счет дублирования разработки и внедрения аналогичных элементов таких систем. Более эффективным представляется создание многофункциональной интегрированной телематической транспортной системы, обеспечивающей решение широкого круга задач при оптимизации затрат времени и ресурсов на ее создание и эксплуатацию.
В современных условиях центральной проблемой эффективной организации транспортного процесса во многих крупных городах и на внегородских участках дорожной сети с интенсивным автомобильным движением является оптимизация использования ограниченного ресурса общего пользования, каковым является пропускная способность улично-дорожной сети (УДС). Для решения этой проблемы целесообразно создать интегрированную интеллектуальную транспортную систему (ИИТС), позволяющую помимо решения задач интегрированной телематической транспортной системы, примеры которых приведены выше, реализовывать следующие функции:
- прогнозирование транспортных потоков и дорожной обстановки на территории крупного города с окрестностями, внегородского участка дорожной сети либо, возможно, небольшой страны;
- выработка обеспечивающих оптимизацию транспортных потоков и дорожной обстановки команд средствам управления дорожным движением и данных для средств информирования водителей;
- формирование оптимальных маршрутов движения и прогнозирование продолжительности поездки ТС, сообщивших пункты своего назначения и находящихся на связи с ИИТС;
- формирование оптимальных планов применения (нарядов) для систем (групп) ТС.
Функциональная структура ИИТС показана на рис. 1.
Объекты управления (информатизации) этой системы относятся к трем классам:
- единичные ТС;
- системы (группы, парки) ТС;
- транспортные потоки в целом.
Разделение функций управления и информатизации обусловлено тем, что для части ТС требования к порядку, условиям движения и перевозки грузов, контролируемые с помощью ИИТС, установлены либо будут установлены нормативными документами (такие ТС обозначены на рис. 1 красным шрифтом). Для этих ТС система играет роль управляющей. Транспортные средства, для которых не установлены нормативные требования вышеуказанного характера (на рис. 1 показаны зеленым шрифтом), могут быть подключены к системе по желанию их владельцев и информация, получаемая от системы, играет роль рекомендаций, которые могут выполняться либо не выполняться по решению владельца либо водителя ТС. Такие ТС будем считать объектами информатизации.
Каждому из этих классов соответствуют классы задач, подлежащих решению с помощью ИИТС. Задачи управления (информатизации) единичными ТС можно разделить на следующие группы:
- контроль;
- управление;
- экстренное реагирование на аварии.
Контроль осуществляется в отношении ТС, для которых нормативными документами либо владельцами ТС установлены специальные требования к порядку, условиям движения и перевозки грузов либо необходимость мониторинга. Примерами могут являться ТС, для которых установлена плата за проезд по определенным участкам УДС, перевозящие опасные грузы, пассажирские ТС и т. д. Существо задачи состоит в отслеживании местоположения и состояния ТС и при выполнении заданных условий осуществление необходимой реакции (сообщение оператору, передача данных в платежные системы, сообщение в правоохранительные органы, структуры транспортного надзора, владельцу ТС и т. п.). Управлению подлежат государственные либо коммерческие ТС по решению их владельцев в целях повышения эффективности использования этих ТС. В рамках решения этой задачи ИИТС, возможно, во взаимодействии с информационными системами владельцев ТС, вырабатывает команды управления, передаваемые на борт ТС. Примеры – ТС оперативных, дорожных и коммунальных служб, общественный транспорт и т. п.
Информирование осуществляется в отношении любых ТС по желанию их владельцев, в том числе и ТС, для которых установлена необходимость контроля и управления. Оно состоит в сообщении на борт ТС информации об оптимальном (рациональном) маршруте следования в пункт назначения и прогнозируемом времени прибытия. Очевидными необходимыми условиями для этого является передача с борта ТС в систему данных о пункте назначения и поддержание связи с системой для корректировки маршрута и прогноза в реальном масштабе времени. Экстренное реагирование на аварии состоит в обеспечении возможности передачи сообщения об аварии ТС в автоматическом режиме, а также при наличии такой возможности по голосовому каналу и доведении этого сообщения до аварийно-спасательных служб для принятия необходимых мер. Круг ТС, которые должны быть оснащены соответствующей аппаратурой, вероятно, будет установлен федеральными властями.
К таким разновидностям можно, например, отнести задачу контроля маршрута движения ТС. Она является основой взимания платы за проезд определенных участков УДС, контроля соблюдения правил перевозки опасных грузов и целого ряда других приложений.
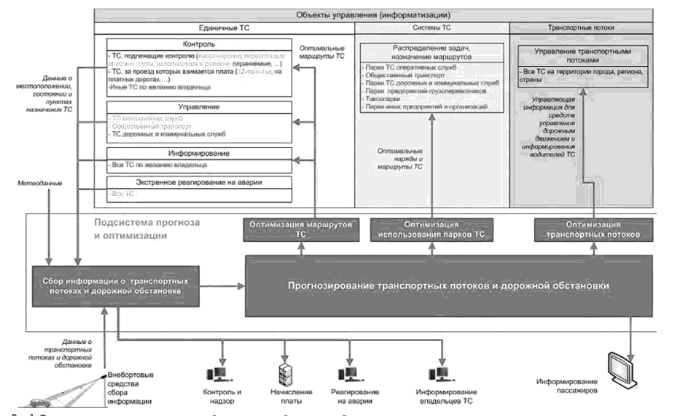
Рисунок 1 – Функциональная структура интегрированной интеллектуальной транспортной системы
Основным содержанием задач управления системами (группами, парками) ТС является определение оптимальных планов применения (нарядов) ТС, т. е. распределение между ТС подлежащих выполнению заданий и при необходимости определение оптимальных маршрутов следования ТС. Данный класс также можно разделить на группы задач, например, статические и динамические. В статических задачах задается исходное положение ТС, составляющих группу, начальные и конечные пункты маршрутов следования и характеристики заданий, например, веса и объемы грузов, которые должны быть доставлены из исходных пунктов в конечные. Подобные задачи характерны для грузовых автопредприятий, дорожных, коммунальных служб и т. п. В динамических задачах задания заранее неизвестны, они могут поступать в любой момент, при этом требуется оптимальным образом выбрать ТС, которому назначается поступившее задание, а также маршрут его следования к начальному пункту и, возможно, из начального в конечный пункт. Таким образом могут решаться задачи управления ТС оперативных служб, таксопарков и т. д.
Наиболее сложным комплексом задач является управление транспортными потоками на заданной территории, которое осуществляется с целью наиболее рационального использования УДС для удовлетворения транспортных потребностей пользователей. Управление производится путем выработки командной информации для средств управления дорожным движением, данных для отображения на средствах информирования водителей и передачи сформированной информации соответствующим адресатам.
Большинство перечисленных задач должно решаться путем оптимизации соответствующих показателей качества. Для получения адекватных решений этих задач необходимо сформировать прогноз транспортных потоков и дорожной обстановки на наиболее продолжительный из периодов, для которых должны быть получены решения. Прогноз представляет собой динамическую модель УДС, например, в виде графа, вообще говоря, переменной структуры с заданными переменными во времени величинами загрузки его ребер транспортом на интервале времени, для которого осуществляется прогнозирование. Изменения структуры графа отражают вводимые и отменяемые (в том числе с помощью изменяемых дорожных знаков) ограничения на движение по определенным участкам УДС, а переменные величины загрузки его ребер транспортом – интенсивность прогнозируемых транспортных потоков. Исходными данными для прогнозирования являются сведения о местоположении и состоянии ТС на УДС, а также о пунктах назначения тех ТС, которые выдали данные о них в систему. Информация о местоположении и состоянии ТС поступает от бортовых автомобильных навигационно-информационных комплексов (БАНИК), а также от внебортовых средств сбора информации. Необходимо также использовать информацию о текущих и прогнозируемых погодных условиях.
На основе собранной информации должны формироваться данные для таких пользователей ИИТС, как органы транспортного надзора, операторы платежных систем, аварийноспасательные структуры, владельцы ТС и т. д. Качество решения вышеперечисленных оптимизационных задач в значительной степени определяется полнотой и достоверностью информации о текущем и прогнозируемом состоянии транспортных потоков. Данные об их текущем состоянии могут быть получены от бортовых навигационно-информационных комплексов ТС и внебортовых средств сбора информации, что указывает на необходимость интеграции данных, получаемых всеми ТТС. Для прогнозирования необходимо получить данные о пунктах назначения возможно большего количества ТС, движущихся по УДС. Эти данные могут быть выданы владельцами государственных и коммерческих ТС, а также водителями индивидуальных ТС, если оптимизированные маршруты позволят получить заметный выигрыш в продолжительности поездки либо хотя бы достоверный прогноз продолжительности, если значительная перегрузка УДС не позволяет достичь такого выигрыша.
Возможная функциональная структура подсистемы прогнозирования и оптимизации ИИТС показана на рис. 2. Ее функционирование может осуществляться следующим образом.
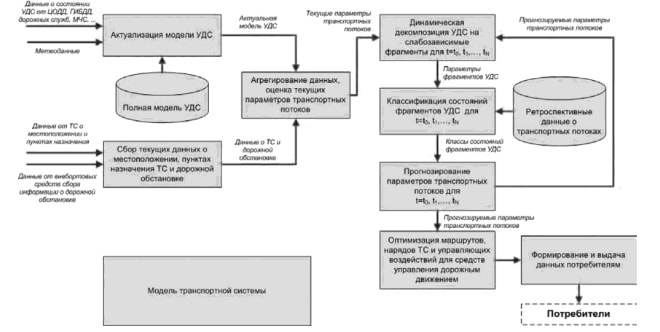
Рисунок 2 – Возможная функциональная структура подсистемы прогнозирования и оптимизации ИИТС
На основе текущих параметров транспортных потоков, а также параметров, спрогнозированных на предыдущих шагах процесса, производится динамическая декомпозиция УДС на слабозависимые фрагменты, соответствующие заданным для прогнозирования моментам времени t=Ю, 11. Слабозависимыми считаются те фрагменты УДС, ситуации на которых оказывают незначительное влияние друг на друга. Очевидно, что состав и границы таких фрагментов существенно зависят от степени загруженности и пропускной способности УДС. Для полученных фрагментов производится решение задачи классификации, которая позволяет отнести ситуацию в данном фрагменте к одному из классов, ранее сформированных на основе ретроспективных данных о транспортных потоках, либо создать новый класс. Исходя из результатов классификации осуществляется прогнозирование параметров транспортных потоков для выделенных фрагментов и УДС в целом. Полученный прогноз используется при решении вышеописанных оптимизационных задач, результаты которых преобразуются в необходимые форматы и представляются потребителям. Необходимым элементом подсистемы должна быть достаточно точная математическая модель транспортной системы, позволяющей исследовать транспортные потоки в динамике их изменения. На этой модели могут проверяться различные решения, принимаемые в ходе разработки, отрабатываться ситуации, редко возникающие на практике и решаться иные задачи в целях обеспечения качества функционирования подсистемы.
Следует отметить чрезвычайно высокую научную и вычислительную сложность и инновационный характер описанной проблемы. Можно предположить, что для ее решения применительно к наиболее крупным городам потребуется использование суперкомпьютеров. К решению проблемы! представляется целесообразным привлечь наиболее квалифицированные научные силы, вероятно, из институтов РАН, в том числе тех, которые уже проводили исследования в данной области (см., напр. [2], [3], [4]). Проведенный анализ развития ТТС за рубежом позволяет заключить, что решение указанной проблемы, если удастся его получить, будет обладать мировой новизной. Известно решение компании IBM (IBM Traffic Prediction Tool, внедренное, в частности, в Сингапуре в 2007 г.), которое обеспечивает прогнозирование транспортных потоков [5], однако задачи оптимизации в нем не ставятся. В США Управление шоссейных дорог (Federal Highway Administration, FHWA) Министерства транспорта в 1994 г. инициировало проект Динамического назначения трафика (Dynamic Traffic Assignment, DTA) с целью создания Транспортной системы оценки и прогнозирования в реальном времени (Traffic Estimation and Prediction System, TrEPS) в рамках которого были разработаны прототипы указанной системы DynaMIT–R and DYNASMART–X. В настоящее время эти продукты используются как инструменты при проведении исследований, для управления транспортными потоками их применение ограничено.
Одной из основных причин того, что на данном важнейшем направлении развития ИТС пока не достигнуто значительное продвижение, может быть следующее. В странах, достигших наиболее высокого уровня развития ТТС (Япония, Южная Корея, ряд европейских стран, США), указанные системы создавались на протяжении нескольких десятилетий, когда возможностей массового доступа к данным ГНСС не было либо они были ограничены. Поэтому основой их ТТС стали внебортовые средства сбора информации, которые имеют гораздо меньшие возможности получения данных о положении и пунктах назначения отдельных ТС. В этой связи и возможности прогнозирования и оптимизации параметров транспортных процессов достаточно ограничены. Данные ГНСС используются либо планируются к использованию лишь в некоторых существующих и создаваемых системах (система взимания платы с грузовиков массой свыше 12 т LKW-Maut (Германия), действующая с 2005 г.; системы экстренного реагирования на аварии eCall (Европейский Союз), плановый срок запуска – 2014 г. и NG 911 (США), плановый срок запуска – 2011 г.; система мониторинга транспорта и защиты отугона SIMRAV (Бразилия), плановый срок запуска – 2012 г. [6]). Эти системы предназначены для решения ограниченного круга задач и не обеспечивают прогнозирования и оптимизации транспортного процесса. В России же основой ТТС должна стать система ГЛОНАСС. Это, в частности, позволяет снизить затраты на создание ТТС за счет экономии на внебортовых средствах сбора информации, которые необходимы в гораздо меньшем количестве главным образом для обеспечения контрольных функций.
Указанные особенности ИИТС могут стать важными факторами высокого экспортного потенциала системы. Снова заметим, что для повышения качества оптимизации параметров, относящихся к единичным ТС, их системам и транспортным потокам необходима интеграция данных от всех ТС, оснащенных бортовыми навигационно–информационными комплексами, что наиболее просто и экономично обеспечивается путем создания единой интегрированной системы. Необходимо обратить внимание на то, что с точки зрения как антитеррористической, так и антикриминальной безопасности совокупность данных о положении и пунктах назначения большого количества ТС всех категорий требует принятия высокоэффективных мер защиты этой информации от несанкционированного доступа. Для обеспечения такой защиты указанная совокупность данных, как представляется, должна находиться под государственным контролем. Таким образом, наиболее перспективным направлением развития телематических транспортных систем является создание интегрированной интеллектуальной транспортной системы, обеспечивающей наряду с решением задач отдельных ТТС повышение эффективности транспортного процесса в целом. Такая система может как внедряться в городах и регионах России, так и поставляться на экспорт в комплексе с услугами по ее адаптации, что может в значительной степени компенсировать затраты на создание системы.
Исходя из вышеизложенного, а также работы [7], можно заключить, что рациональный процесс создания и развития ИИТС должен включать 4 направления работ (рис. 3):
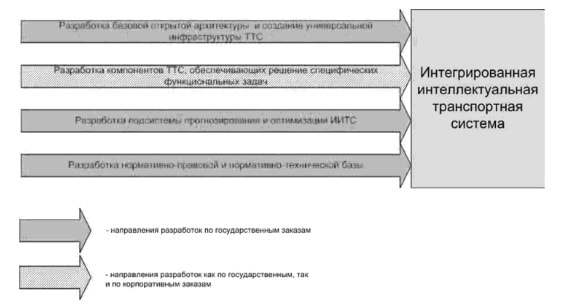
Рисунок 3 – Схема процесса создания и развития ИИТС
При этом работы по всем направлениям, корме второго, должны выполняться по государственным заказам, а по второму – как по государственным, так и по корпоративным.
Список использованной литературы
1. В. А. Гапанович, И. Н. Розенберг. Основные направления развития интеллектуального железнодорожного транспорта. "Железнодорожный транспорт", № 4 2011.
2. Г. Г. Малинецкий, В. В Семенов. Дорожное движение в контексте фундаментальных исследований. Препринт. Институт прикладной математики им. М.В.Келдыша (ИПМ РАН) № 64, Москва, 2007.
3. А. С. Алиев, А. И. Стрельников, В. И. Швецов, ЮЗ Шершевский. Моделирование транспортных потоков в крупном городе с применением к Московской агломерации. Автоматика и Телемеханика, № 11, 2005.
4. В. И. Швецов. Алгоритмы распределения транспортных потоков. Автоматика и Телемеханика, № 10, 2009.
5. W. Min, L. Wyrtsr, Y. Amemiva. IBM Research Report. Road Traffic Prediction w'th Spatio–Temporal Correlations. IBM Research Division. Thomas J. Watson Research Center. Yorktown Heights. RC24275 (W0706–018) June 5, 2007.
6. Состояние и перспективы российского рынка спутниковой навигации. М.:, ГЛОНАСС/ГНСС–Форум, GPS CLUB, 2011.
7. Отчет о НИР по теме "Научно–методическое обеспечение правового регулирования отношений в области интеллектуальных транспортных систем". М.: ОАО "НИИАТ", 2010.