Актуальность
Тепловизоры применяют для наблюдения за распределением температуры исследуемой поверхности. Современные тепловизоры нашли широкое применение как на крупных промышленных предприятиях, где необходим тщательный контроль за тепловым состоянием объектов, так и в небольших организациях, занимающихся поиском неисправностей сетей различного назначения. Так, сканирование тепловизором может безошибочно показать место отхода контактов в системах электропроводки.
Особенно широкое применение тепловизоры получили в строительстве при оценке теплоизоляционных свойств конструкций. Так , к примеру, с помощью тепловизора можно определить области наибольших теплопотерь в строящемся доме и сделать вывод о качестве применяемых строительных материалов и утеплителей.
Современные тепловизоры позволяют определять температуры динамических (движущихся объектов) в режиме реального времени. Однако стоят они весьма дорого (тысячи евро). В качестве дешевой альтернативы в данной работе рассматривается тепловизор сканирующего типа, выполненный на базе бесконтактного инфракрасного (ИК) датчика температуры серии MLX90614 фирмы Melexis [1]. Данный тепловизор подойдет для съемки статических объектов.
Цель работы
Целью работы является исследование тепловизора сканирующего типа на базе ИК датчика температуры серии MLX90614 и оценка его основных метрологических характеристик : уровня собственных шумов, погрешности измерений, пространственной разрешающей способности.
Принцип действия тепловизора заключается в определении поля температур исследуемой поверхности путем сканирования по сегментам. Температура сегмента измеряется с помощью бесконтактного ИК датчика температуры с узкой диаграммой направленности. Для перемещения фокуса термодатчика по сегментам используется поворотный кронштейн с двумя сервоприводами, обеспечивающий поворот датчика по горизонтали и вертикали с разрешением в 1 градус.
Основным элементом тепловизора, определяющим его возможности и характеристики, является ИК датчик температуры MLX90614-ACF (см. рис. 1).

Рисунок 1 – Внешний вид (а) и расположение выводов (б) датчика MLX90614-ACF
MLX90614-ACF имеет нормированные метрологические характеристики и узкую диаграмму направленности в 10 градусов по уровню 50 % от максимальной чувствительности (см. рис. 2). Диапазон измеряемых температур датчика лежит в пределах от -70 0С до +380 0С. Основная погрешность в диапазоне измеряемых температур от 0 0С до 50 0С не превышает ±0,5 0С и достигает ±4 0С на краях рабочего диапазона измерений.
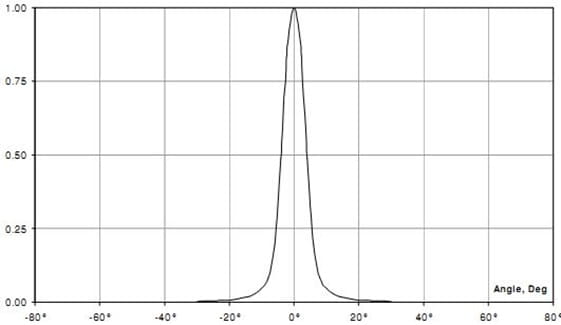
Рисунок 2 – Диаграмма направленности датчика MLX90614-ACF
На рисунке 3 представлена принципиальная схема исследуемого тепловизора. Датчик температуры и два сервопривода подключаются непосредственно к стандартному микропроцессорному модулю Arduino Uno. Управление сервоприводами осуществляется с помощью сигналов широтно-импульсной модуляции (ШИМ) S1 и S2. Обмен данными с датчиком MLX90614 происходит по шине двухпроводного интерфейса I2C.
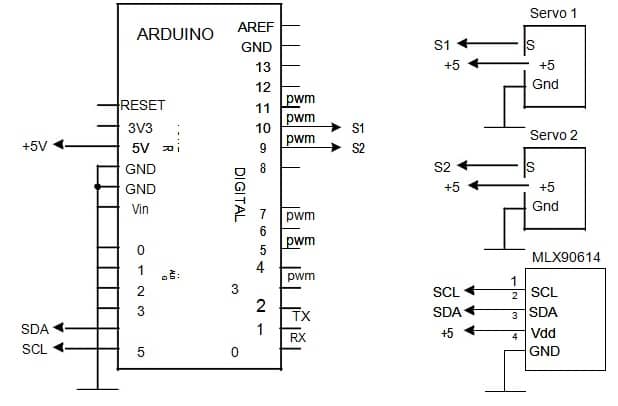
Рисунок 3 – Принципиальная схема тепловизора на базе датчика
MLX90614 Тепловизор реализует следующий алгоритм работы:
- По команде от микроконтроллера сервоприводы поворачивают кронштейн на заданный угол по вертикали и горизонтали.
- Выдерживается некоторая пауза для установления показаний датчика температуры.
- Микроконтроллер получает от датчика значение температуры данного сектора поверхности.
- Микроконтроллер передает в компьютер температуру и угловые координаты сектора.
- Программа на Delphi для компьютера получает измерительные данные от микроконтроллера и формирует цветную картинку теплового поля исследуемой поверхности.
Опытный образец разработанного тепловизора приведен на рисунке 4. Тепловизор выполнен в бескорпусном варианте и содержит только стандартные элементы.
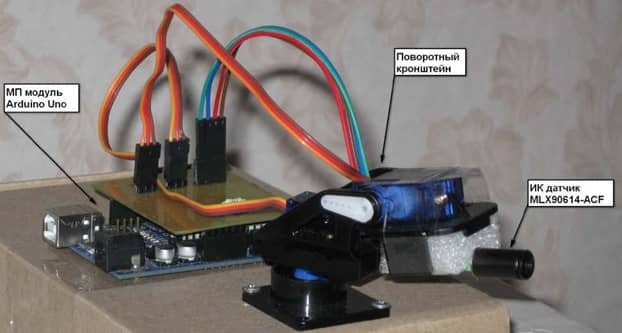
Рисунок 4 – Опытный образец тепловизора
Основным недостатком рассматриваемого тепловизора является большое время сканирования, которое равно произведению времени измерений в точке tизм на общее число точек сканирования N

где nx, ny – число точек по горизонтали и вертикали соответственно.
Из (1) следует, что для уменьшения времени сканирования необходимо уменьшать число точек сканирования N и время измерений в точке tизм . Время измерений датчика MLX90614 зависит от настроек встроенных цифровых фильтров и может быть установлено в пределах от 0,06 до 7 секунд. В результате экспериментов выяснилось, что при уменьшении времени измерений растет уровень шумов термометра. В качестве примера на рисунка 6 и 7 приведены результаты измерений уровня шума датчика MLX90614-ACF при настройках по умолчанию и максимальном быстродействии соответственно. Из результатов следует, что выбор времени измерений является компромиссом между быстродействием и качеством измерений. Авторами было выбрано: tизм = 0,14 с; nx=60; ny =40. Расчетное время сканирования:

На рисунке 7 представлены объекты сканирования, фарфоровая кружка с теплой водой (50 0С) и охлажденная до 10 0С консервная банка. Результаты сканирования, полученные с помощью разработанного тепловизора на различных расстояниях до объектов, приведены на рисунках 8 и 9.

Рисунок 5 – Объекты сканирования
Из результатов следует, что пространственная разрешающая способность исследуемого тепловизора примерно равна 10 градусам, время сканирования около 5,5 минут а основная погрешность измерений температуры в диапазоне от 0 до 50 С не превышает 0,5 С.
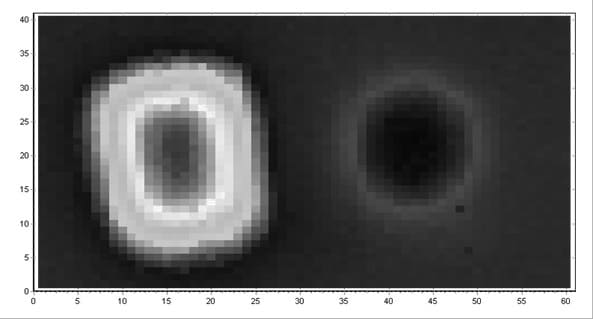
Рисунок 6 – Результаты сканирования с расстояния 0,5 метров
Выводы
1. Разработанный тепловизор пригоден для сканирования статических объектов. При стоимости менее $100 он обеспечивает пространственную разрешающую способность в 10 градусов и минимальную погрешность измерений температуры в 0,5 С.
2. Для улучшения разрешающей способности до 5 градусов рекомендуется применить датчик с индексом I в конце (MLX90614-ACI).
Ссылки
1. Самодельный тепловизор на базе Arduino Электронные данные. – Дата доступа: апрель 2014.