
Реферат за темою випускної роботи
Зміст
Вступ
У даній роботі враховується досвід розробки елементів електромеханічних рук. У ході дослідження, проведено аналіз декількох видів механічних характеристик біоелектричних протезів: за допомогою ниткоподібної тяги, робочої на черв'ячному механізмі поступального руху і подібного до нього поршневого типу, а також змішаного типу.
Для проекту було обрано біоелектричну модель рук з приводом для всіх пальців. Ця модель є більш функціональною, надійною і здатні робити різнi схвати, таку як схват на щіпці, коли звичайні протези мають лише зовнішній, подібний до теперішнього, вид рук. Дизайн пальця взято з плаката Санкт–Петербурзького політехнічного університету [9].
Розглянемо його механічний дизайн. Принцип тягового електроприводу для кожного пальця був прийнятий для поліпшення технічних характеристик пристрою та універсальність. На малюнку 1 показана модель однієї частини долоні, елементи якої складаються в пристрій. Вона реалізована за допомогою 3D–друку ABC пластика (див. рис.2).
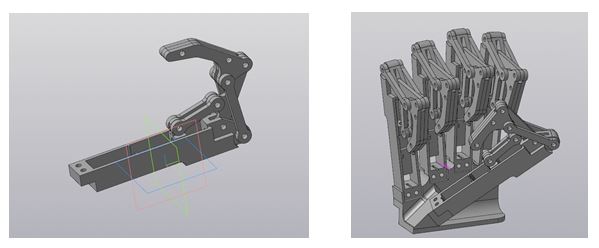
Рисунок 1 – 3D–модель частини біоелектричного протезування
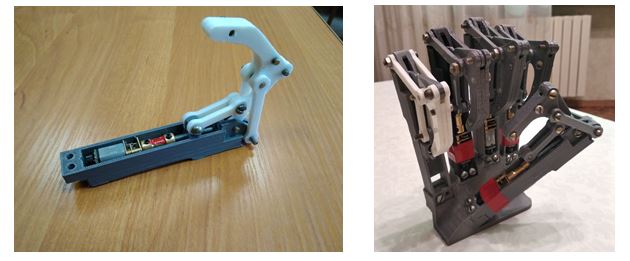
Рисунок 2 – Розроблена та створена частина протезного плеча
Забезпечення згинання та розширення пальця здійснюється за допомогою редукторного двигуна з вбудованим датчиком. Параметри двигуна такі: номінальна напруга – 6В, номінальна швидкість – 90 об/хв, номінальний момент – 0,7 кг/см, номінальний струм – 170 мА. За попередніми розрахунками, ці параметри повиннi були забезпечити достатню силу стиснення, швидкість згину приблизно на дві секунди і прийнятну точність керування пристроєм. Але перша спроба була невдалою, неможливо було реалізувати гвинтову передачу з зазначеними характеристиками (крок гвинта повинен бути 11 мм). Далі було вибрано звичайну гвинт болта M5, крок якого 0,8 мм. У цьому випадку швидкість згинання пальця становила 24 секунди. Тому двигун був замінений на той самий розмір, але з меншим коефіцієнтом передачі, що дозволило пасувати з швидкістю 2 с, але це було необхідно пожертвувати силою стиснення. Малюнки з основними стандартними розмірами представлені на рис. 3 та 4
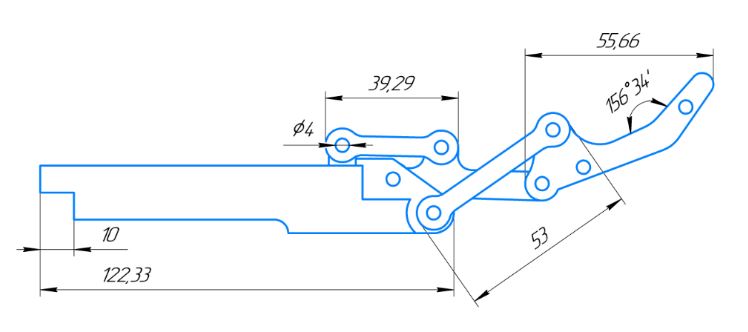
Рисунок 3 – рисунок пальця (вид збоку)
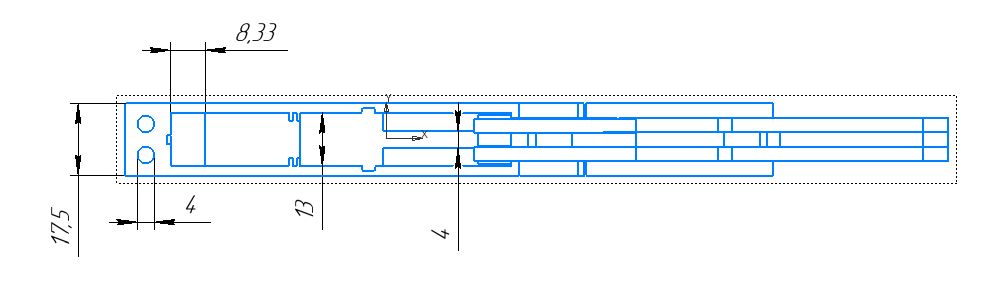
Рисунок 4 – рисунок пальця (вид зверху)
Дана конструкція розроблена для того, щоб була можливість утримувати великі ваги не за допомогою електроприводу, а завдяки своїй конструкції. Черв'ячна передача дозволяє зафіксувати предмет і не дати йому випасти, а обрана конструкція дає можливість відключити приводний двигун і зафіксувати предмет в одному положенні. Це дає економію енергії і збільшення тривалості роботи пристрою в умовах автономної тривалої експлуатації. Можна збільшити цей показник, замінивши пластикові робили на певний сплав металів для посилення конструкції і зменшення люфтів між деталями конструкції.
Список літератури
- О динамической модели кисти человека: Российский журнал биомеханики [2007], том 11, №1: 70-75.
- Электромеханическая система управления биоэлектрическим протезом верхних конечностей: Уфа, ФГБОУ ВО
Уфимский государственный авиационный технический университет
, ОООИПЦ-Энергия
. - Разработка и реализация макета бионического протеза кисти руки: ФГАОУ ВПО НИУ
БелГУ
, г. Белгород. - Использование датчика Flex [Электронный ресурс]: Проект сайта sparkfun.com, США. URL : https://learn.sparkfun.com/... (дата обращения: 20.11.2016).
- Гринь В.В., Басалыгин Е.В., Розкаряка П.И. Разработка аппаратной части Робо–руки на базе платы Arduino / Международная научно–практическая конференция
Инновационые перспективы донбасса
// Перспективы развития электротехнических, электромеханических и энергосберегающих систем, 2017. – 230–233с., [Электронный ресурс]. Режим доступа: http://ipd.donntu.ru - Определение сервопривода [Электронный ресурс] . Режим доступа: http://dic.academic.ru/...
- Рука и предплечье [Электронный ресурс]: Проект сайта inmoov.fr, США. URL : http://inmoov.fr/... (дата обращения 16.01.2017).
- Виды протезов рук [Электронный ресурс]. Режим доступа: : http://motorica.org/... (дата обращения 14.04.2018).
- Бионический протез руки [Электронный ресурс]. Режим доступа: : http://mech.spbstu.ru/... (дата обращения 14.04.2018).
- Разработка и анализ функционального протеза руки с нейрофизиологической системой управления [Электронный ресурс]. Режим доступа: : https://boomstarter.ru/... (дата обращения 14.04.2018).