Анализ и разработка роботизированной руки
Автор: Басалыгин Е.В., Гринь В.В., Розкаряка П.И.
Источник: III Международная научно-практическая конференция Инновационные перспективы Донбасса
Аннотация
Общая постановка проблемы
Данный проект был неплохим тренажором для создания более усовершенствованой версии антропоморфного манипулятора. У первоначальной модели было множество недостатков, которые необходимо было устранить.
На сегодняшний день существует большое количество различных разновидностей протезов верхних конечностей. Их основными изготовителями являются такие компании как «Моторика» (Россия), «Bebionic» (Великобритания), «Ottobock» (Германия), «Touch bionics» (Великобритания) и многие другие. На сайте компании «Моторика» можно найти такое разделение протезов по назначению на две основные группы: косметические и функциональные [8]. Главная функция косметического протеза – воссоздание внешнего вида человеческой руки. Функциональные же протезы позволяют обеспечивать хват и по принципу механизма управления делятся: рабочие, тяговые (активные, механические), миоэлектрические (биоэлектрические, бионические) [8].
Очевидно, что стоимость косметических протезов ниже стоимости бионических протезов, но она стартует от 1000$. Стоимость бионических значительно больше [8].
На данный момент главными проблемами протезирования верхних конечностей человека являются высокая стоимость устройства и его сложность. Если первую проблему можно решить, изменяя баланс между качеством и надежностью материалов, то вторую проблему в данный момент не удастся решить легко. Это связано с необходимостью индивидуального подхода к каждому пациенту.
Конструкция и принцип действия
В данной работе предоставлен опыт разработки элементов электромеханической руки. В ходе исследования был осуществлен анализ нескольких типов механического исполнения биоэлектрических протезов: использующих нитевую тягу, работающих на червячной передаче поступательного движения и схожие с ним поршневого типа, а также смешанного типа.
Для проекта была выбрана биоэлектрическая модель руки с приводами на все пальцы т.к. эта модель является более функциональной, надёжной и способная делать различные хваты, такие как хват в щепоть, когда обычные протезы имеют только внешний, схожий с настоящей, вид руки. За основу была взята конструкция пальца из постера Санкт-Петербургского политехнического университета [9].
Рассмотрим его механическую конструкцию. Был взят принцип тягового электропривода на каждый палец для улучшения технических характеристик устройства и универсальности. На рисунке 2 представлена модель одной части кисти, из элементов которой будет состоять устройство. Она реализована с помощью 3Д печати ABC пластиком (см. рис. 3).
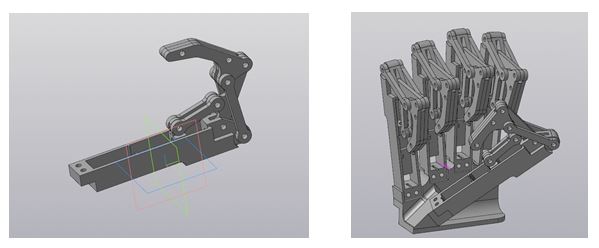
Рисунок 4.1 – 3D модель части биоэлектрического протеза
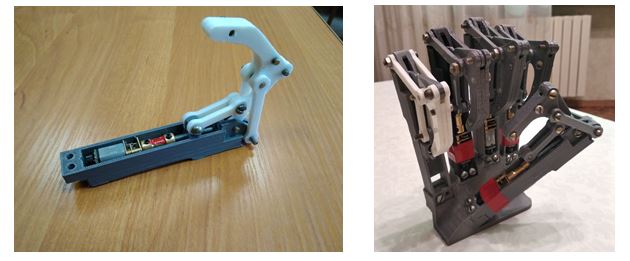
Рисунок 4.2 – Спроектированная и созданная часть протеза руки
Обеспечение сгибания и разгибания пальца реализовано с помощью мотор-редуктора со встроенным энкодером. Параметры двигателя следующие: номинальное напряжение – 6В, номинальная скорость – 90об/мин, номинальный крутящий момент – 0.7 кг/см, номинальный ток – 170мА. Эти параметры по предварительным расчетам должны были обеспечить достаточную силу сжатия, скорость сгибания около двух секунд и приемлемую точность управления устройством. Первая попытка оказалась неудачной: реализовать винтовую передачу с указанными характеристиками не удалось (шаг резьбы должен был составлять 11мм). Далее был выбран вариант с обычной резьбой болта М5, у которого шаг резьбы составляет 0.8мм. В этом случае скорость сгибания пальца составила 24 с. Поэтому мотор-редуктор был заменен на такой же типоразмер, но с меньшим передаточным числом, что позволило реализовать скорость сгибания пальца в 2 с, однако пришлось пожертвовать силой сжатия. Чертежи с основными типоразмерами представлены на рис. 4 и 5.
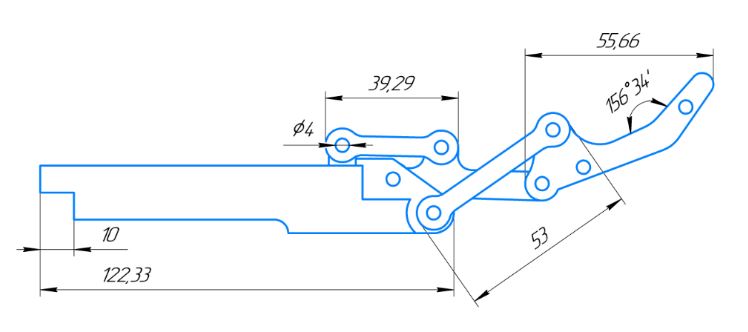
Рисунок 4.3 – Чертеж пальца (вид сбоку)
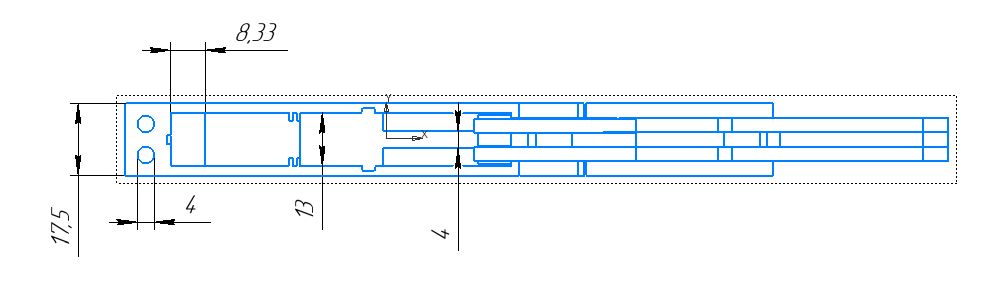
Рисунок 4.4 – Чертеж пальца (вид сверху)
Данная конструкция разработана для того, чтобы была возможность удерживать большие веса не с помощью электропривода, а благодаря своей конструкции. Червячная передача позволяет зафиксировать предмет и не дать ему выпасть, а выбранная конструкция дает возможность отключить приводной двигатель и зафиксировать предмет в одном положении. Это дает экономию энергии и увеличение длительности работы устройства в условиях автономной длительной эксплуатации. Можно увеличить этот показатель, заменив пластиковые делали на определенный сплав металлов для усиления конструкции и уменьшения люфтов между деталями конструкции.
Система управления и характеристики работы
Далее необходимо реализовать управление конструкцией.
Для этого была выбрана плата STM32F4Discovery. Выбор в пользу неё был сделан т.к. она обладает мощным процессором, большим количеством таймеров, и множеством контактов ввода вывода данных.
Реализация системы управления была сделана в программной среде MATLAB Simulink, и для работы с STM32F4Discovery была добавлена библиотека Wajiung. Такое решение было принято т.к. данная среда позволяет быстро создать рабочую программу из функциональных блоков, а также настроить их в кротчайшие сроки.
При помощи программной среды MatLab Simulink Wajiung разработана программа для управления приводом. Она позволяет контролировать положение вала двигателя, а значит и изгиб пальца.
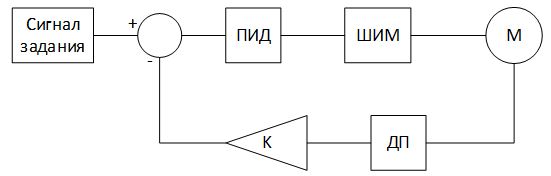
Рисунок 4.5 – Функциональная схема системы управления
Для создания схемы использовались такие блоки как: UART5_target, PWM_Digital, Volatile Data Storage Read, Encoder Read. На блок UART5_target приходит 4 сигнала управления: три коэффициента ПИД регулятора и сигнал задания, который измеряется в градусах. Далее сигнал поступает на ПИД регулятор, где регулируется перемещение. На выходе ПИД регулятора получается сигнал от 0 до 100, что соответствует 0 В и номиналу напряжения. После, блок PWM_Digital создает ШИМ управления, где для управления двигателем необходимо 2 сигнала задания, первый сигнал – ШИМ, который отвечает за «заполненность» сигнала, второй – за направление движения двигателя (вперед, назад). С помощью блока Volatile Data Storage Read идет считывание переменной из буфера task1, который является сигналом задания положения вала двигателя (в градусах). Encoder Read – это блок, с помощью которого считывается угол поворота двигателя, а также он является обратной связью по перемещению и измеряется в градусах.
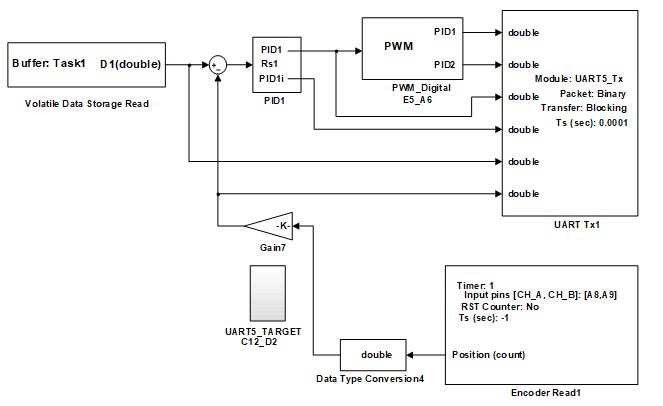
Рисунок 4.6 – Модель для управления электроприводом
Структура является очень простой, и она обеспечивает требуемые характеристики работы. Однако, как можно увидеть из рисунка 8, график показания энкодера имеет перерегулирование в размере 7%, что является плохим результатом и в дальнейшем регулятор будет настраиваться для обеспечения перерегулирования не более чем 1%. Эта погрешность не сильно видна из-за технических особенностей механизма. Были взяты болты общего пользования и гайки к ним, они плохо подогнаны и в соединении которых присутствует зазор, что дает большие люфты в конструкции и неточность движения.
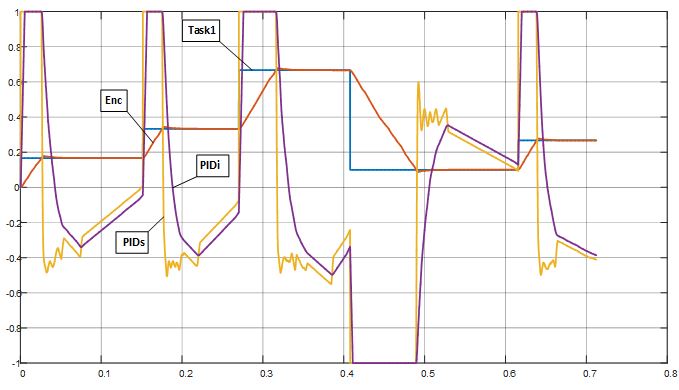
Рисунок 4.7 – Результаты работы модели
Управление положением осуществляется заданием точного значения угла поворота вала двигателя от 0 и до 10800 градусов. Сигнал с него преобразуется, масштабируется и в качестве угла поворота поступает в систему управления. На рисунке 8 изображена отработка положения при задании определённых углов поворота, где график Task1 обозначает задание угла, а Enc – его отработка двигателем. Видно, что положение отрабатывается практически без ошибки, а время отработки сигнала очень мало и равняется 0.03-0.08 с.
Как видно из рисунка 8, в начале задания сигнала Task1, двигатель не может мгновенно отработать сигнал. Для способствования скорейшей отработки ПИД регулятор усиливает коэффициент задания скачком до максимального значения. Это видно по отработке полной составляющей ПИД регулятора – PIDs, интегральная же составляющая повторяет кривую полного сигнала, но уже более сглажено. При приближении положения двигателя к заданию, ПИД регулятор уменьшает коэффициент. Его значение уходи в минус, а затем возрастают из-за того, что сигнал Enc немного переработал или недоработал задание и регулятор старается это исправить.
Выводы
- В ходе выполнения данной работы была разработана рука - робота имитирующая движения, которые выполняются оператором с сенсорной перчаткой.
- Данная рука используется как прототип для создания человекоподобных роботов, систем удаленного управления в труднодоступных местах и агрессивных средах, и протезов.
- В данной работе исследована тема создания электромеханических протезов, разработана и реализована часть устройства бионической руки. Исследуемая конструкция [10] была усовершенствована и воссоздана. Была написана программа для управления положением изгиба пальца. Проведены первичные испытания устройства и сделаны выводы на основе их.
Список источников
- Виды протезов рук [Электронный ресурс]. Режим доступа: : http://motorica.org/vidy-protezov-ruk/ (дата обращения 14.04.2018).
- Бионический протез руки [Электронный ресурс]. Режим доступа: : http://mech.spbstu.ru/images/6/64/Kovalev_poster.pdf (дата обращения 14.04.2018).
- Разработка и анализ функционального протеза руки с нейрофизиологической системой управления [Электронный ресурс]. Режим доступа: : https://boomstarter.ru/projects/221181/bionicheskiy_protez_ruki_maxbioni (дата обращения 14.04.2018).