3Д стабилизатор для съеми в движении на базе STM32F4Discovery
Авторы: Д.П. Свиридов, Е.А. Бондаренко
Научные рукводители: П.И. Розкаряка, Д.Н. Мирошник
Источник: Научно-техническое творчество молодежи как способ формирования профессиональных компетенций – 2017 / Материалы конференции-выставки, секция Электрооборудование
– 2017, с. 12-13.
В настоящее время системы стабилизации камеры стедикам
(англ. steadicam
),
широко применяются в видеосъемке. Устройство позволяет значительно сизить колебания и добавить плавности движения.
На кафедре Электропривод и автоматизация промышленных установок
разработано устройство стабилизации камеры.
Его схема соединений (рисунок 1), состоит из отладочной платы STM32FDiscovery, гироскопа L3G4200d, двух драйверов
L298N [1–4], трёх двигателей постоянного тока (ДПТ 1, ДПТ 2, ДПТ 3) и блока питания 12 В (БП).
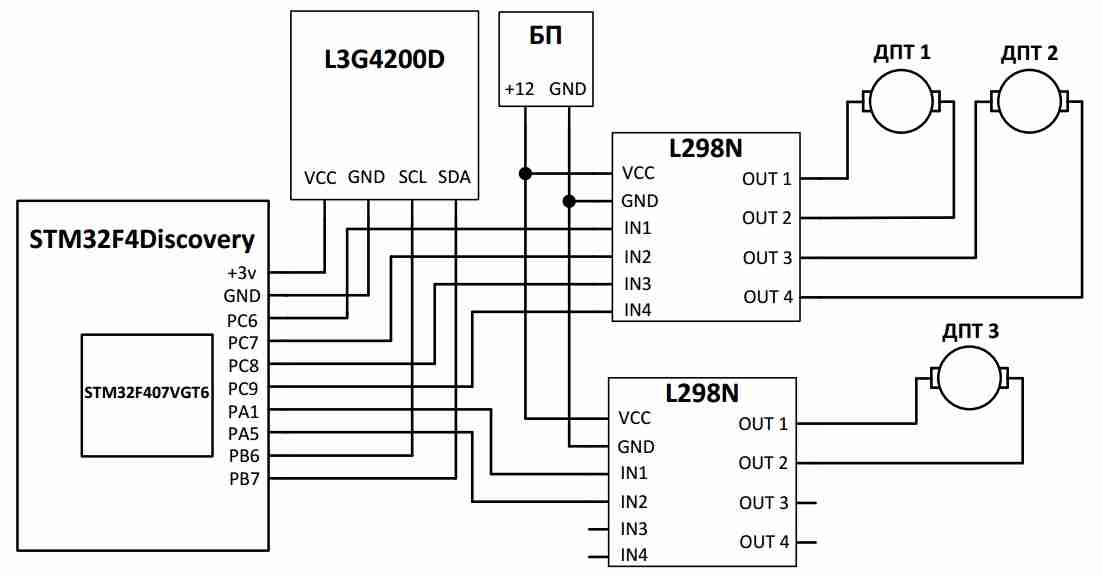
Рисунок 1 – Принципиальная схема устройства
К плате STM32FDiscovery подключен по шине I2C трехосевой гироскоп L3G4200d. Принцип работы гироскопа основан на измерении смещения инерционной массы относительно корпуса и преобразования его в пропорциональный электрический сигнал. Гироскоп – устройство, которое измеряет текущую угловую скоость. Драйвео, содержащий два однофазных моста, служит для управления двумя двигателями постоянного тока. Подавая импулься ШИМ на выходы драйвера, можно управлять скоростью и направлением вращения вала двигателя.
Структурная схема системы управления (рисунок 2) состоит из блоков инициализации и считывания данных с гироскопа, калибровки гироскопа и блоков распределения управляющих импульсов на драйверы.
Цифровые интеграторы используются для получения угла поворота из угловой скорости. Регулирование заданного нулевого угла поворота по каждой оси осуществляется ПИД–регуляторами. На его вход подается мигнал рассогласования по одной из трёх осей, а выход используется модулями ШИМ для формирования импульсов управления драйвером. При этом, выходной положительный сигнал регулятора преобразуется в импульсы ШИМ одного входа драйвера при движении ДПТ в одно сторону, а отрицательный – в импульсы ШИМ другого входа драйвера, опеспечивающего движение ДПТ в противоположную сторону. В устройстве использована частота ШИМ 10кГц.
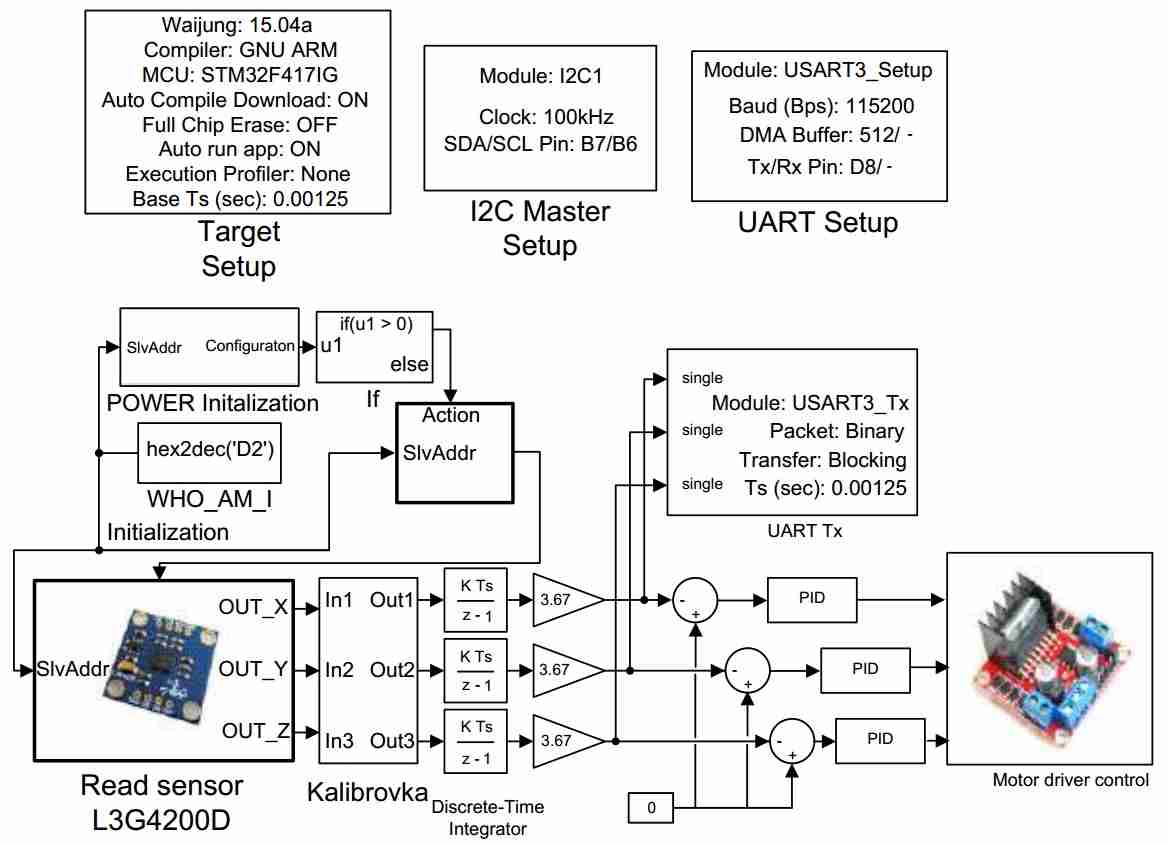
Рисунок 2 – Структурная схема системы управления
С целью отладки работы устройства возможно применение UART протокола. Поскольку максимальная скорость считывания данных с гироскопа составляет 800 Гц (инерционность 1.125 мс), его использование возможно в любых подобных системах стабилизации, требующи применение обратной связи п положению объекта. Например для управления квадракоптером, сигвеем или гироскутером.
На рисунке 3 приведено фото разработанного устройства. Для более точной и качественной стабилизации используются компактные противовесы.
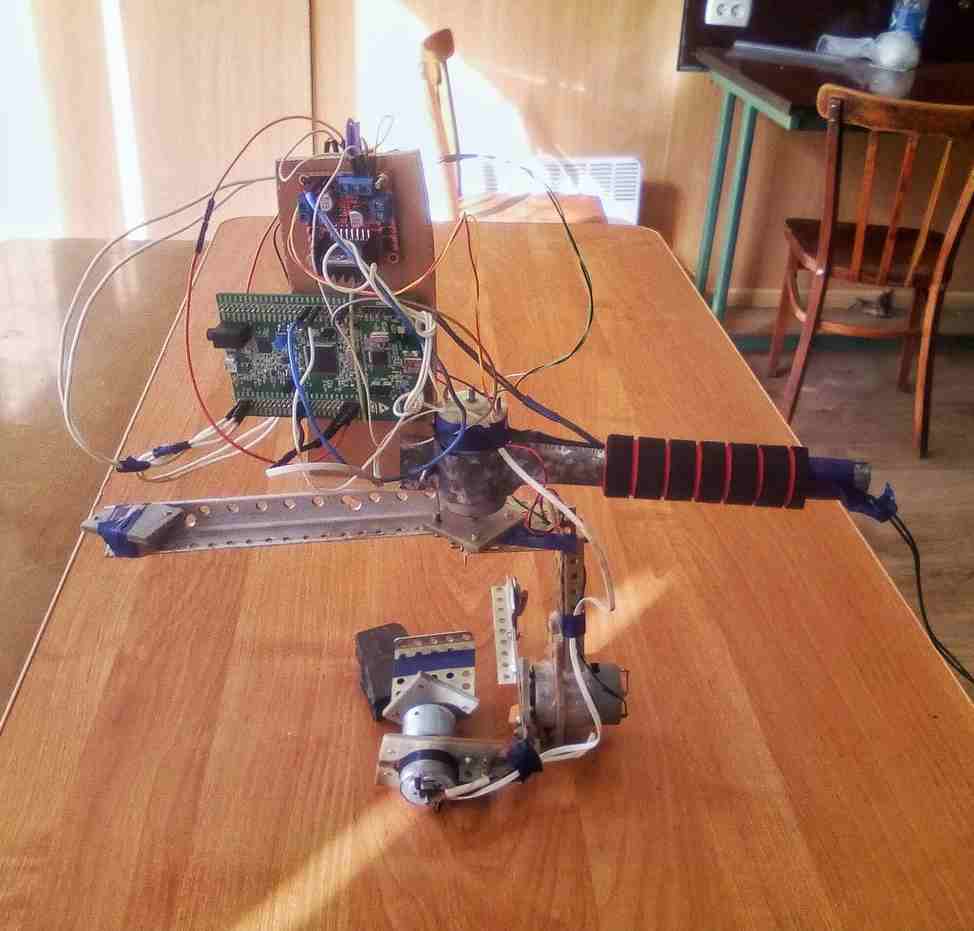
Рисунок 3 – Общий вид устройства стабилизатор
Выводы:
- разработано функционирующее устройство для стабилизации положения по трём осям;
- для улучшения работы системы требуется переход на бесколлекторные двигатели и использование датчика с шестью осями свободы.
Список использованной литературы
- User manual UM1472. Discovery kit with STM32F407VG MCU.
- Control DC and Stepper Motors With L298N Dual Motor Controller Modules and Arduino. [Электронный ресурс]. – Режим доступа: https://www.instructables.com/…
- МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы. [Электронный ресурс]. – Режим доступа: http://www.russianelectronics.ru/…
- ST Microelectronics portal. [Электронный ресурс]. – Режим доступа: http://www2.st.com/content/st_com/en.html