Моделирование и симуляция трехфазного асинхронного двигателя с применением Simulink
Автор: Shi K. L ., Chan T. F., Wong Y. K., Ho S. L.
Автор перевода: Бондаренко П. В.
Источник: Int. J. Elect. Enging. Educ., Vol. 36, pp. 163–172. Manchester U.P., 1999.
Введение
Моделирование трехфазных асинхронных машин хорошо описано в литературе и компьютерные решения могут быть выполнены с использованием различных методов, таких как цифровое программирование, символическое программирование и программ, выполняющих расчет электромагнитных переходных процессов. В условиях бурноого развития компьютерного оборудования и программного обеспечения, новые пакеты моделирования, которые работают быстрее становятся доступными. В данной статье обсуждается использование одного таких продуктов, программное обеспечение MATLAB SIMULINK из, в динамическое моделирование из асинхронного двигателя.Основным преимуществом SIMULINK по сравнению с другими программирования программного обеспечения является то, что, вместо того, компиляция программного кода, имитационная модель строится систематически с помощью основных функциональных блоков. Через удобный графический интерфейс пользователя (GUI), функциональные блоки могут быть создан, связаны между собой и редактировать легко с помощью команд меню, клавиатуры и соответствующее указательное устройство (например, мышь).Набор дифференциальных машины уравнений Таким образом, можно моделировать взаимосвязь соответствующую функцию блоков, каждый из которых выполняет конкретные математические операции. Программирование усилия значительно снижаются и отладка ошибок легко. С SIMULINK является программатор операции, моделирование Модель может быть легко разработаны путем добавления новых суб-модели для удовлетворения различные функции управления. Как суб-модель асинхронного двигателя можно было бы включить в полной электрической системой привода
Моделирование асинхронного двигателя с помощью simulink
Обобщенная динамическая модель асинхронного двигателя состоит из электрических суб-модели для реализации трехфазного двум осям (3/2) преобразование Напряжение и ток статора расчета, крутящий момент суб-модель для расчета разработан электромагнитный момент и механические суб-модели для получения скорости вращения ротора. Кроме того, ток статора выход суб–модель необходима для расчета падения напряжения на питающих кабелях. Преобразованияе от трехфазной модели к двум осям напряжения достигается с помощью следующих выражений:
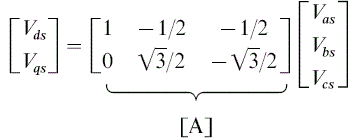
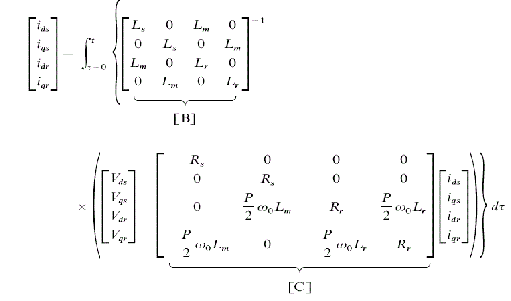
где Vas, VBS, и Vcs из трехфазных напряжений статора, в то время Vds и Vqs являются двумя осями координат вектора Vs напряжения статора. В две оси системы координат статора, ток уравнения индукции двигателя можно записать в виде:
Моделирование системы асинхронных двигателей
Напряжение блока питания состоит из трехфазного синусоидального напряжения генератора и терминал напряжения блока расчета на долю которого приходится падение напряжения в кабеле питания. Трехфазное синусоидальное напряжение генератора основано на уравнении:
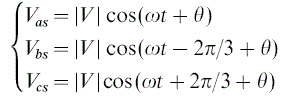
где |V| – амплитуда напряжения на клеммах, V – частота сети, h – начальный угол фазы.
Из-за падения напряжения в кабеле питания, напряжения на клеммах задается уравнением:
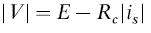
где Е – напряжение питания и Rc – сопротивление кабеля.
Результаты моделирования
Для иллюстрации переходных работы асинхронного двигателя, моделирования исследования в реальном времени, приведем пример. При Т=0, двигатель, который ранее был обесточен и находился в состоянии покоя, имеющий напряжение 220 В, 60 Гц трехфазное питание через кабель. Момент нагрузки, TL, является постоянной на уровне 20 N.m. Результаты аналогичны тем, которые получены с помощью традиционных моделирования Метод связанных дифференциальных уравнений. Замечено, что когда кабель имеет большое сопротивление, скорость снижается быстрее, но время выбега двигателя больше.
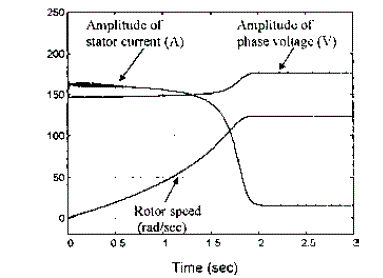
Рисунок 1 – Результаты моделирования при сопротивлении кабеля 0,2 Ом
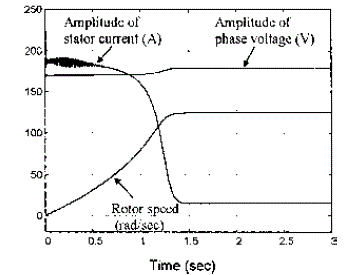
Рисунок 2 – Результаты моделирования при сопротивлении кабеля 0,05 Ом
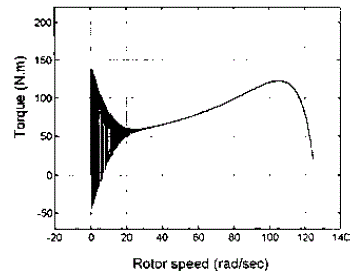
Рисунок 3 – Пусковая характеристика электродвигателя при сопротивлении кабеля 0,2 Ом
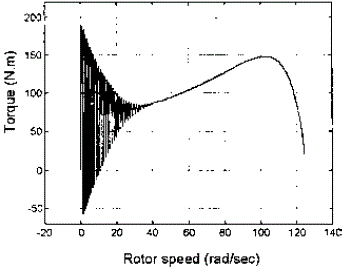
Рисунок 4 – Пусковая характеристика электродвигателя при сопротивлении кабеля 0,05 Ом
Заключение
SIMULINK представляет собой мощный программный комплекс для исследования динамических и нелинейных систем. Использование SIMULINK, имитационная модель может быть построена систематически, начиная от простых суб-моделей асинхронного двигателя, и заканчивая сложными системами. Авторы считают, что SIMULINK в скором времени станет незаменимым инструментом для исследования электрических двигателей.
Литература
- Krause, P. C., 'Simulation of symmetrical induction machinery', IEEE T rans. Power Apparatus Systems, Vol. PAS-84, No. 11, pp. 1038–1053 (1965)
- Ghani, S. N., 'Digital computer simulation of three-phase induction machine dynamics – a generalized approach', IEEE T rans Industry Appl., Vol. 24, No. 1, pp. 106–114 (1988)
- Wade, S., Dunnigan, M. W. and Williams, B. W., 'Modeling and simulation of induction machine vector control and rotor resistance identification', IEEE T rans. Power Electronics, Vol. 12, No. 3, pp. 495–505 (1997)