Рассмотрено нечеткое логическое управление работой ветроэлектрической установкой автономной системы. Используемый на выходе турбины синхронный генератор с постоянными магнитами изменяет частоту и амплитуду выходного напряжения при изменении его частоты вращения. По этой причине напряжение генератора выпрямляется, а затем преобразуется в переменное с помощью автономного инвертора. Для обеспечения максимальной выходной мощности, в диапазоне скоростей ветра от минимальной до расчетной номинальной, в ветроэлектрической установки применяется контроллер на основе нечеткой логики.Применение данного типа управления,с переменным шагом дискретизации входных величин, обеспечивает более быстрое нахождение оптимальной точки работыза счет адаптивно уменьшающегося размера шага в поиске.
A rule-based Fuzzy Logic Controller for an optimal control of wind energy Conversion Scheme
The paper presentsа rule-based fuzzy logic controller to control the output power of in a stand alone wind energy system. The permanent magnet synchronous generator driven by wind turbine has the inherent problem of fluctuations in the magnitude and frequency of its terminal voltage with changes in wind velocity and load. To overcome this drawback, the variable magnitude, variable frequency at the generator terminals is rectified and the DС power is transferred to the load through DC-AC inverter. The objective is to track and extract maximum power from the wind energy system and transfer this power to the load. This is achieved by using the fuzzy logic controller which regulates a wind turbine speed as a function of generator output power.
Несмотря на все нарастающее загряз нение окружающей среды и удорожание ископаемых энергоносителей, нетрадиционная энергетика нашей страны развивается незначительными темпами. Этому способствует дешевизна электроэнергии от тепловых электростанций относительно стоимость ветроэлектрических установок (ВЭУ). Для ветроагрегатов малой мощности она начинается от 1200 долл. за 1 кВт установленной мощности [1, 2]. Особенности ВЭУ малой мощности обусловлены спецификой рынка данной категории ветроагрегатов, рассчитанной на индивидуальных потребителей частного сектора и малый бизнес. Низкая платежеспособность индивидуальных потребителей и невозможность (или ограниченные возможности) профессионального технического обслуживания создают необходимость максимального упрощения и удешевления конструкции агрегатов. При этом показатели надежности и автономности работы должны оставаться на высоком уровне. Снизить стоимость ВЭУ можно за счет совершенствования её конструкции, а также путем оптимизации рабочих режимов.

Рис. 1. – Структурная схема ВЭУ
Целью данной работы является оптимизация режимов работы ВУЭ, направленная на максимально высокое использование энергии ветра.
Рассматриваемая ВЭУ имеет в своемnсоставе горизонтально-осевой крыльчатый ветродвигатель с системой регулирования угла атаки лопастей, мультипликатор, синхронный генератор с постоянными магнитами (СГПМ) подключенный через управляемый выпрямитель(УВ) на активно индуктивную нагрузку. Структурная схема ВЭУ представлена на рисунке 1.
Специфической особенностью ВЭУ является непостоянство развиваемой мощности во времени. Ветер по своей природе явление непостоянное. Моментно-мощностнуюхарактеристику ВЭУ можно рассматривать вчетырех ветровых зонах: 1-я зона охватывает диапазон изменения скорости от нулевой до начальной (минимальной скорости ветра, при которой ВЭУ начинает выдавать электроэнергию в сеть); 2-я зона охватывает диапазон изменения скорости ветра, при котором ВЭУ работает в режиме выработки переменной мощности; 3-я – это диапазон изменения скорости ветра от расчетной до максимальной рабочей скорости ветра (режим поддержания выдачи в сеть номинальной мощности); 4-я – зона скоростей ветра, выше максимально допустимой рабочей [2]. Зависимость мощности Р, вырабатываемой ВЭУ, от скорости ветра V представлена на рисунке 2.
Доля энергии в режиме переменной мощности (вторая зона) весьма значительна. Так при среднегодовой скорости ветра 4 м/с ветроагрегат, развивающий номинальную мощность при 8 м/с, вырабатывает в режиме переменной мощности 60% энергии. С ростом среднегодовой скорости ветра эта доля снижается, но и при среднегодовой скорости ветра 6 м/с ветроагрегатво второй зоне вырабатывает 45% энергии [2].
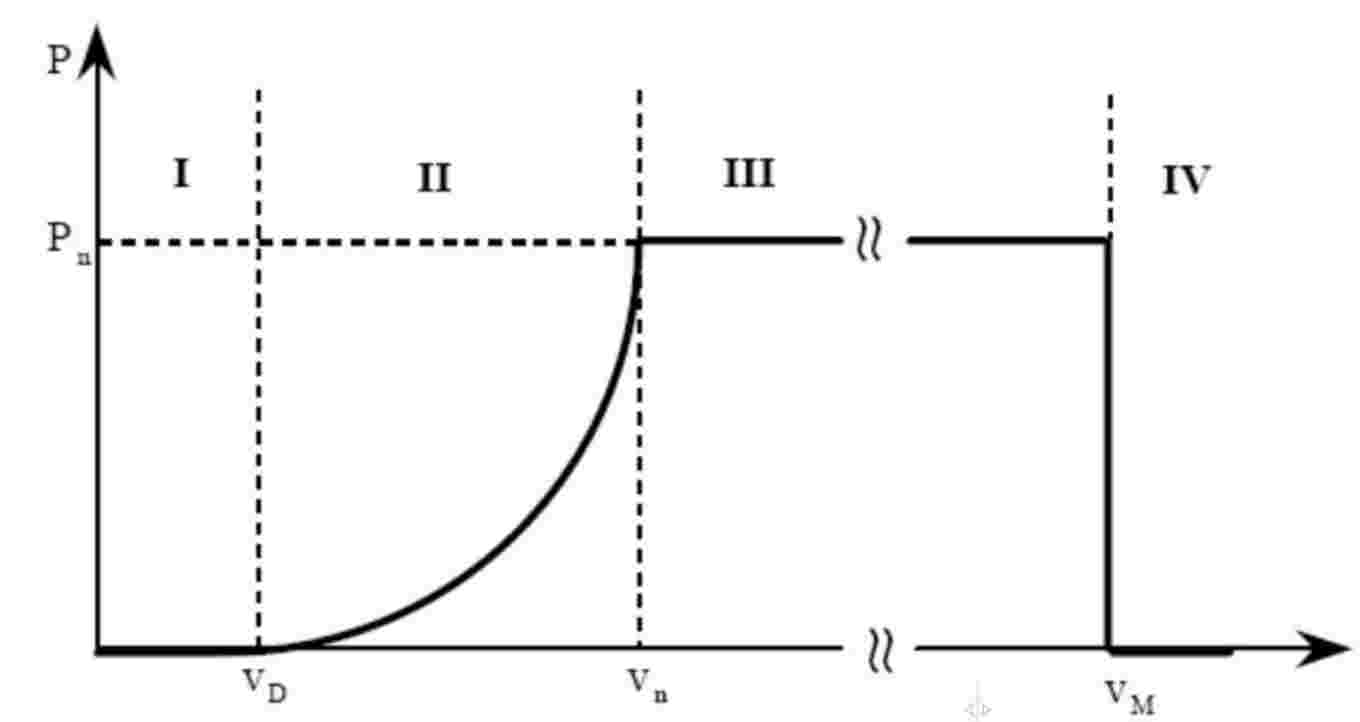
Рис. 2. – Зависимость мощности, вырабатываемой ВЭУ, от скорости ветра
Из вышесказанного следует, что режим переменной мощности является основным для ВЭУ. В работе исследуется алгоритм поиска оптимальной скорости вращения генератора ВЭУ во 2-й ветровой зоне.
Для управления нелинейными системами, в особенности при недетерминированных воздействиях, во многих случаях целесообразно применение контроллеров, основанных на нечетких множествах. Одним из основных направлений практического использования систем нечеткого вывода является решение задач управления различными объектами или процессами. В этом случае построение нечеткой модели основывается на формальном представлении характеристик исследуемой системы в терминах лингвистических переменных. Поскольку кроме алгоритма управления, основными понятиями систем управления являются входные и выходные переменные, то именно они рассматриваются как лингвистические переменные при формировании базы правил в системах нечеткого вывода.
В общем случае цель управления заключается в том, чтобы на основе анализа текущего состояния объекта управления определить значения управляющих переменных, реализация которых позволяет обеспечить желаемое поведение или состояние объекта управления. В настоящее время для решения соответствующих задач используется общая теория управления, в рамках которой разработаны различные алгоритмы нахождения оптимальных законов управления объектами различной физической природы.
Базовая архитектура или модель классической теории управления основывается на представлении объекта и процесса управления в детерминированной форме. При этом объект управления характеризуется некоторым конечным множеством входных параметров и конечным множеством выходных параметров. На вход системы управления поступают некоторые входные переменные, которые формируются с помощью конечного множества датчиков. На выходе системы управления с использованием алгоритма управления формируется множество значений выходных переменных, которые еще называют управляющими переменными или переменными процесса управления. Значения этих выходных переменных поступают на вход объекта управления и, изменяют его поведение в желаемом направлении.Алгоритм работы регулятора основан на сравнении выходных параметров объекта управления с некоторыми заданнымипараметрами и определении величины расхождения между ними или ошибки. После этого рассчитываются величины выходных переменных в форме суммы величины ошибки, значения интеграла и производной по времени в течение некоторого промежутка времени. Один из недостатков регуляторов заключается в предположении о линейном характере зависимости входных и выходных переменных процесса управления, что существенно снижает адекватность этой модели при решении отдельных практических задач. Другой недостаток модели связан со сложностью выполнения соответствующих расчетов, что может привести к недопустимым задержкам в реализации управляющих воздействий при оперативном управлении объектами с высокими требованиями к динамике [4].
Архитектура или модель нечеткого управления основана на замене классической системы управления системой нечеткого управления, в качестве которой используются системы нечеткого вывода. В этом случае модель нечеткого управления строится с учетом необходимости реализации всех этапов нечеткого вывода.Один из примеров таких систем приведен в [5].
В рассматриваемой системе контроллер нечеткой логики (КНЛ) производит поиск экстремума в режиме реального времени. Его задача заключается в задании скорости вращения генератора в зависимости от скорости ветра. КНЛ дает сигнал на изменение скорости вращения генератора ωr и оценивает изменение мощности ВЭУ на выходе Po (рис. 3). Поиск завершается достижением оптимального соотношения между скоростью вращения генератора и выходной мощностью. С увеличением (уменьшением) скорости i > ωr, соответственно уменьшается (увеличивается) оцененное Po. Если, с другой стороны, при приращении Δωr* получаем уменьшение ΔPo, то направление поиска реверсируется. Приращение скорости уменьшается, когда поиск приближается к оптимальному значению.

Рис. 3. – Силовая схема преобразователя ВЭУ
Структура КНЛ показана на рисунке 4. В блокенечеткого вывода (НВ), происходит фаззификациявходных переменных, их последующее сопоставление с базой правил, и, в конечном итоге,дефаззификацияв количественное значение скорости вращения ротора генератора [6]. Масштабные коэффициенты KPO и KWR, являются функциями скорости ωr, и введены длярасширения диапазона чувствительности системы.
Для реализации процесса нечеткого моделирования использовалось среда MATLAB Fuzzy Logic Toolbox. В качестве алгоритма нечеткого вывода использовался алгоритм Мамдани.
В таблице 1 представлена матрица правил КНЛ. Для компактности применены общепринятые обозначения диапазонов величин: P – положительный; N – отрицательный; ZE – нулевой; PVB – положительный очень большой; PB – положительный большой; PM – положительный средний; PS – положительный малый; NS – отрицательный малый; NM – отрицательный средний; NB – отрицательный большой; NVB – отрицательный очень большой.
Типичное правило выглядит так: Если ΔPo принадлежит PM и LΔωr* из P, то Δωr* PM.

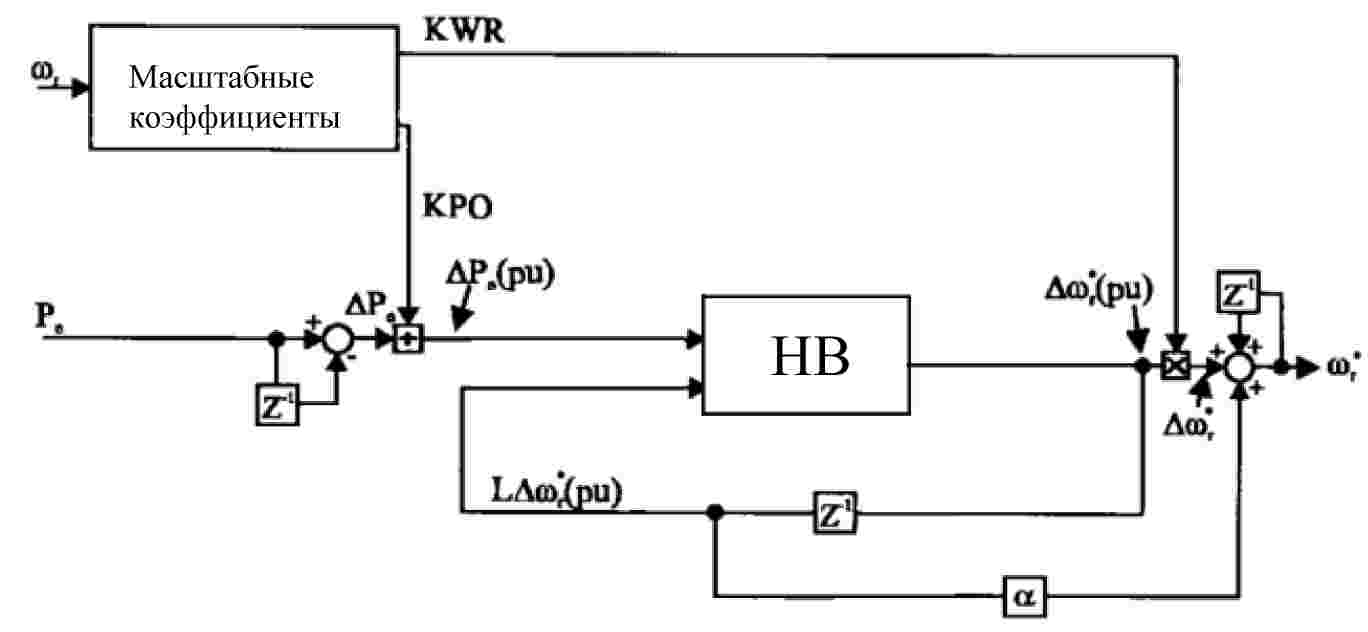
Рис.4. – Структурная схема КНЛ
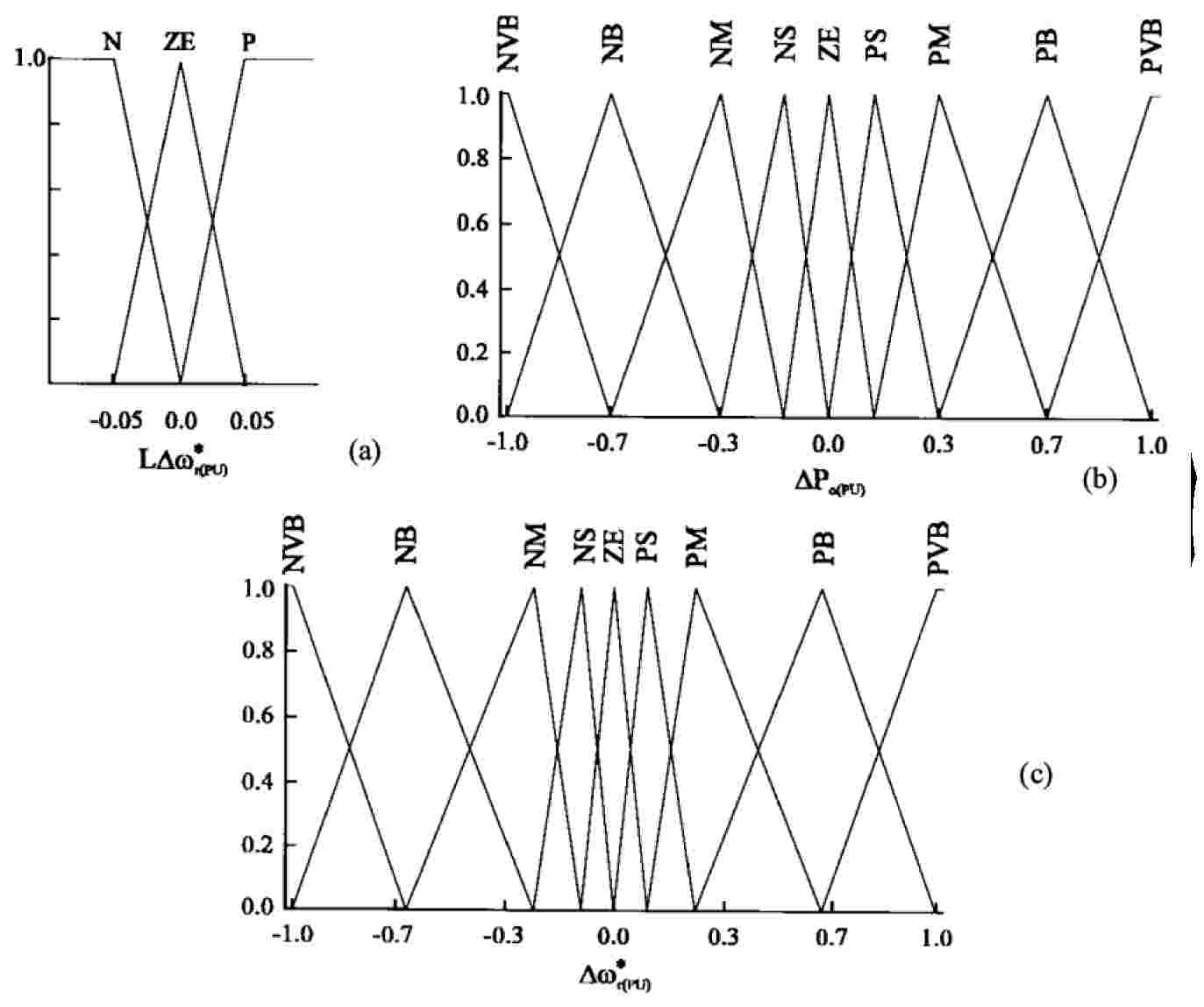
Рис. 5. – Функции принадлежности входных и выходных переменных
На рис. 5 показаны функции принадлежности (ФП), для малого приращения скорости ΔLΔωr*(а), для приращения выходной мощности ΔPo(b), и для Δωr*(c). ФП ΔPo и Δωr* являются ассиметричными, что придает им большую чувствительность.
ВЫВОДЫ
Показаны преимущества нечеткого логического управления для поиска оптимальной скорости вращения ветрогенератора. Применение КНЛ,с переменным шагом дискретизации входных величин, обеспечивает более быстрое нахождение оптимальной точки работы за счет адаптивно уменьшающегося размера шага в поиске. Использование масштабных коэффициентов позволяет применятьпредложенную систему поиска при проектировании систем большей (меньшей) мощности.
ЛИТЕРАТУРА
1. Кривцов В. С., Олейников А. М., Яковлев А. И. Неисчерпаемая энергия. Кн. 1. Ветроэлектрогенераторы – Харьков: ХАИ, 2003. – 400 с.
2. Харитонов В. П. Автономные ветроэлектрические установки. – М.: ГНУ ВИЭСХ, 2006. – 280с.
3. Petrenko, Y. N. Fuzzy logic and genetic algorithm technique for non-linear system of overhead crane / Y. N. Petrenko, S. E. Alavi // Computational Technologies in Electrical and Electronics Engineering (SIBIRCON), 2010 IEEE Region 8 International Conference, 11-15 July 2010. P. 848 – 851.
4. Леоненко А. В. Нечеткое моделирование в среде MATLAB и fuzzyTeCh. – СПб.: БВХ-Петербург, 2003. – 736 с.
5. Петренко Ю. Н., Санкевич С. А. Разработка алгоритма управления, обеспечивающего максимально высокую выходную мощность ветроэнергетической установки с накопителями энергии // Электроника, автоматика и измерительная техника: межвузовский сборник научных трудов с международным участием / Уфимский гос. авиационный тех. ун-т; под науч. ред.: Г. В. Миловзоров. – Уфа, 2011. – с. 47-52.
6. Санкевич С. А. Петренко Ю. Н. Применение контролера нечеткой логики для управления ветроэлектрической установкой / С. А. Санкевич // Информационные технологии и системы 2012: материалы междунар.науч.конф., Минск, 24 октября 2012 г. / БГУИР; редкол.: Л. Ю. Шилин [и др.]. – Минск, 2012. – с. 66-67.