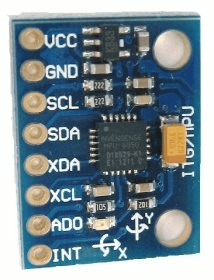
Рис. 1 – Внешний вид модуля GY-521
Автор: В. В. Филонов, Е. К. Карпов
Источник:moluch.ru
Целью данной работы является изучение возможности одновременного применения двух модулей гироскопов-акселерометров с микроконтроллером Atmega328 или ATmega 32u4 для регистрации данных.
При исследовании процессов управляемого движения и поворота мобильных платформ важно регистрировать большой объём различных параметров. Это и скорость вращения колёс, и угловые ускорения платформы вокруг оси, перпендикулярной к плоскости движения. Для случая, когда движение осуществляется по трассе на наклонной поверхности, необходимо также измерять скорость и направления вращения мобильного робота вокруг его поперечной и продольной осей. В работе используются два модуля GY-521 (рис. 1) с гироскопом, акселерометром и термометром – MPU-6050. Эти модули имеют следующие характеристики:
Рис. 1 – Внешний вид модуля GY-521
На микросхеме расположены следующие контакты:
Выбранные датчики можно использовать с микроконтроллерами серий Atmega328 и ATmega 32u4, причём применение стандартной библиотеки “Wire.h” значительно упрощает процесс программирования. В качестве платформы для подключения модулей был выбран мобильный двухколёсный робот “Arduino Robot” (Рисунок 2). Информация, получаемая с них, позволила бы рассчитывать мгновенный центр скоростей мобильной платформы при плоскопараллельном движении. Эти данные используются, например, для улучшения тормозных характеристик автомобилей.
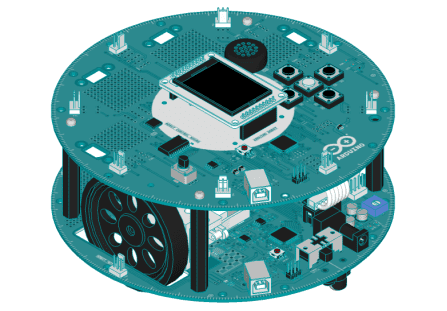
Рис. 2 – Мобильная платформа “Arduino Robot”
Для достижения поставленной цели важны следующие его характеристики:
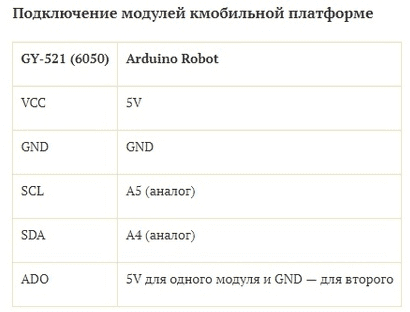
Рис. 3 – Таблица –Подключение модулей кмобильной платформе.
Отдельно стоит отметить, что контакт ADO у используемых датчиков подключается к разным выходам на платформе. Это делается для того, чтобы оба модуля корректно распознавались в процессе работы.
Для проверки собранной системы в “Arduino IDE” была написана простая программа, сделанная из примера для одного модуля, считывающая данные с двух датчиков и выводящая их на последовательный порт для дальнейшей обработки.
В ходе выполнения работы была собрана схема с микроконтроллером и двумя модулями гироскопов-акселерометров, а также написана программа для одновременной обработки данных, получаемых с них.
Дальнейшим развитием работы будет дополнение программы алгоритмами калибровки датчиков и подпрограммой сохранения полученных данных на флеш-карту.