Управление скользящим режимом контактов на основе адаптивного обратного шага для преобразователя постоянного тока
Авторы: Fan Liping, Yu Yazhou, Kosta Boshnakov
Перевод: З.О. Кабаченко
Источник: International Conference on Computer Application and System Modeling (ICCASM)
Аннотация
Присущие характеристики DC–DC преобразователей, такие как высокая нелинейность и изменение во времени, часто может привести к некоторым трудностям при разработке подходов управления. Адаптивный метод управления скользящим режимом и способ управления режимом скольжения терминала объединены в этой статье, чтобы предложить новый вид адаптивной поддержки на основе управление режимом скольжения контактов для DC–DC преобразователя для улучшения конечного эффекта. Новый метод может не только сделать систему адаптирования к факторам неопределенности, но также позволяет системе достичь устойчивого состояния в течение ограниченного времени. Результаты симуляции показали превосходство этого комбинированного подхода. Ключевые слова: Контроль заднего хода; DC–DC преобразователь; адаптивный; управление скользящим режимом
1 Введение
DC–DC преобразователи являются одними из самых простых силовых электронных схем, и они широко используются в оборудовании для питания большинства электронных систем. Преобразователи постоянного тока с переключаемым режимом являются типичными нелинейными изменяющимися во времени системами. Когда используются традиционные методы контроля чтобы их контролировать, возникают некоторые трудности. Переменная структура с управлением скользящим режимом является своего рода нелинейным методом управления. Из преимуществ, это быстрая реакция, хорошая стабильность, высокая надежность и легкость реализации, это влечёт обширные проблемы в области нелинейного контроля в последние годы [1]. Переключающий преобразователь при скользящем режиме управления имеет хорошие внешние характеристики [2]. Однако у обычных преобразователей с управлением по SM имеется небольшой недостаток, заключающийся в том, что их динамические и устойчивые характеристики ухудшаются, если условия нагрузки отличаются от номинальных условий. При работе ниже номинальной нагрузки будут происходить выбросы и звон во время переходного процесса. При работе выше номинальной нагрузки отклик будет медленным с высокой ошибкой установившегося состояния [3].
Адаптивный шаг назад является систематическим и рекурсивным методология для проектирования нелинейного управления с обратной связью. Этот подход основан на систематической процедуре проектирования стратегий управления с обратной связью, подходящих для нелинейных систем проявляет неопределенность и гарантирует глобальное регулирование и отслеживание нелинейных систем, трансформируемых в методология параметрически строгой обратной связи для нелинейных управление с обратной связью [4]. Но, условно говоря, недостатком адаптивного скользящего скользящего управления является сильный выброс и длительное время реакции.
Метод комбинированного адаптивного режима скользящего обратного хода управление с помощью терминала скользящего режима управления построено в этой статье для эффективного управления DC–DC преобразователем. Терминал скользящей поверхности вводится для обеспечения конечного конвергентное время ошибок контроля на поверхности.
1 Модель DC–DC преобразователя
Основная топология преобразователя Buck DC–DC показана на рисунке 1, состоящий из одного переключателя, быстрого диода и RLC компонентов. Переключатель может быть реализован одним из трехполюсных полупроводниковых переключателей, такие как IGBT или МОП-транзистор. Когда конвертер работает в непрерывном режим проводимости [5], системные уравнения можно записать как:
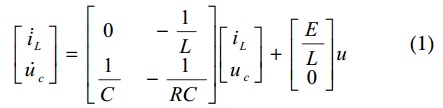
Где u – состояние переключения, когда u=1, переключатель VT включен, а когда u=0, VT выключен
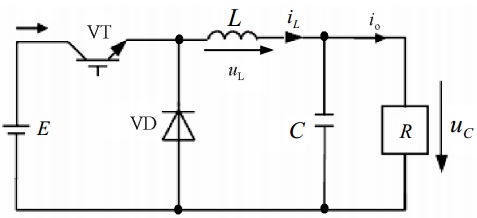
Рисунок 1 – Топология Buck DC–DC преобразователя
Выберем выходное напряжение и его производную в качестве системы переменных состояния, то есть

Тогда модель пространства состояний, описывающая систему віведем как:
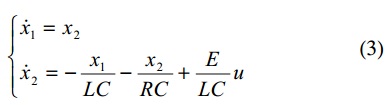
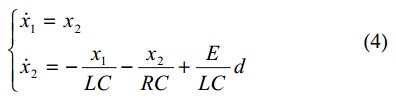
Когда частота переключения достаточно высока, а пульсация мала, мы предполагаем, что коэффициент заполнения периода переключения равен d, тогда модель пространства состояний можно вывести как
Учитывая, что в процессе работы преобразователя может возникнуть некоторое возмущающее воздействие, модель преобразователя можно изменить следующим образом:
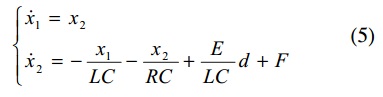
Где F обозначает возмущающее воздействие, приложенное к системе.
1 Адаптивная регулировка на основе скользящего терминального режима управления
А. Адаптивное управление скользящим режимом заднего хода.
Для преобразователя Buck DC-DC, описанного в уравнении (5), сначала разрабатывается адаптивный подход управления скользящим режимом обратного шага. Предположим, что постоянный эталонный выход напряжение Ucd. Ошибка отслеживания выходного напряжения как:

Тогда:

Обозначим:

Где с1 - положительная постоянная
Определим функцию Ляпунова как:


Тогда:

Пока z2=0, можно ли подтвердить V1≤0, а затем стабильность системы может быть удовлетворена. Для того, чтобы получить контроль На входе d сделать z2=0, дальнейшая конструкция выглядит следующим образом.
Определить функцию Ляпунова как:

В которой

является ошибкой оценки, F является оценочной величиной. Предположим, что помеха системы является медленным изменяющимся во времени сигналом, тогда F = 0 может быть удовлетворено. γ - положительная постоянная, а σ - функция переключения, которая определяется как:

Где k1> 0. Тогда можно вывести следующее уравнение
Чтобы устранить влияние ошибки оценки на систему, адаптивный закон выбирается как

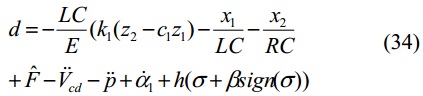
Контроллер выполнен в виде
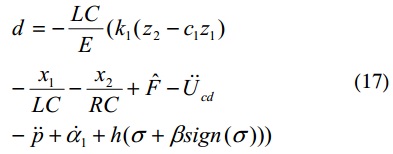
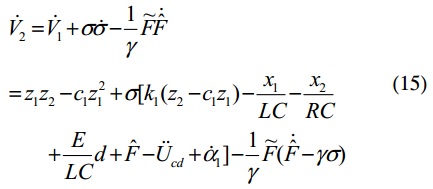
Где h и β - положительные постоянные. Вводим уравнение (16) и (17) к уравнению (15) , тогда следующее уравнение может быть выведено

Где:
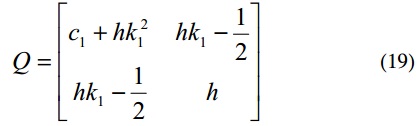
Поскольку |Q|=h(c1+k1)-1/4, поэтому при необходимости h,c1,k1 выбраны, неравенство |Q|>0 будет удовлетворенo, и тогда матрица Q может быть гарантированно положительно определенна.
B. Управление скользящим режимом терминала
Терминальное управление скользящим режимом (TSMC) - это метод контроля стабильности с ограничением времени. В отличие от традиционного режима управления скольжением, вводится скользящая поверхность терминала для обеспечения конечного времени схождения ошибок управления на поверхности [6]. Он предлагает некоторые превосходные свойства, такие как лучшая точность отслеживания, быстрая сходимость, нечувствительность к системной неопределенности и внешним помехам.
Для системы второго порядка (5) предположим, что выходное напряжение сигнала это Ucd, то ошибка слежения и его производные


Уравнение поверхности скользящей моды терминала

Где:

p(t):R+→R, p(t)∈Cn[0,∞),p...p(n)∈L∞. Cn[0,∞) обозначает все дифференцируемые непрерывные функции n-го порядка определено в [0,∞]. Для некоторой константы T>0,p(t) есть oграниченный во времени квант [0, T]

Выберав р(t) как в следующей формуле
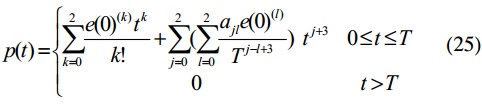
Тогда контролируемая система может достичь устойчивого состояния в ограниченное время Т [7].
В p(t) единственным неизвестным параметром является aij. Решая линейные уравнения с тремя неизвестными, можно решить aij.
Таким образом:
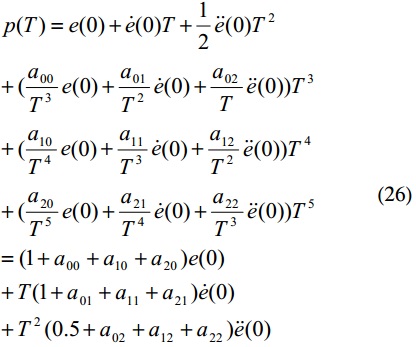
Если p(T)=0, то существуют следующие уравнения
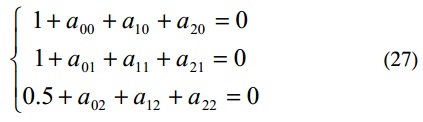
Из уравнения p(T)=0, cледующие уравнения могут быть получены
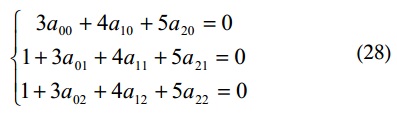
Решив систему уравнений, можно получить следующие результаты
Таким образом, можно получить поверхность скользящего режима терминала. Наконец, проектируя функцию Ляпунова как V=(1/2)σTσ, можно получить управляющий вход d преобразователя постоянного тока в постоянный [8-9].
Поскольку p(0)=e(0), в исходное состояние, система находится на поверхности скользящего режима, когда она находится в исходном состоянии, то есть

Итак, E(t)=P(t) достигнуто. Потому что P(t) в скользящем режиме поверхности равен нулю, поэтому E(T)=0, и так, мы можем сделать систему отслеживания ошибки приближающейся к нулю за ограниченное время T.
C. Конструкция контроллера
Чтобы использовать управление режимом скольжения терминала для адаптивного управления режимом скольжения назад, ошибка отслеживания и ее производная определяются как


Затем выберите соответствующий адаптивный закон и закон управления в соответствии с описанным выше способом управления режимом адаптивного скользящего обратного хода. Адаптивный закон выбран в качестве уравнения (16), а контроллер выполнен в виде
4 Результаты моделирования
Для проверки и сертификации управляющего эффекта предложенного подхода в преобразователе Buck DC-DC использовалась схема управления скользящим режимом терминала на основе адаптивного обратного шага. Режим пространства состояний системы показан в уравнении (5). Соответствующими параметрами преобразователя постоянного тока являются: L=80 мкГн, Ucd=5.5 В, E=24 В, R=8 Ом, C=2000 мкФ. Исходное состояние системы: x=[0.5 0]T. Вход возмущения задается как F=5sin(t/40). Параметры, используемые в процессе проектирования контроллера: h=2, γ=3, k1=5, c1=7, β=5.1. Нагрузка R преобразователя изменяется от 8 Ом до 6 Ом в течение от 5 с до 8 с.
Результаты моделирования показаны на рисунках 2-4. На рисунке 2 показана кривая выходного напряжения с адаптивным управлением скользящим режимом обратного хода. На рисунке 3 и рисунке 4 показаны кривые выходного напряжения с новой предложенной схемой управления. На рисунке 3 назначенное время отслеживания составляет 0.5 с, а на рисунке 4 оно составляет 0.1 с.
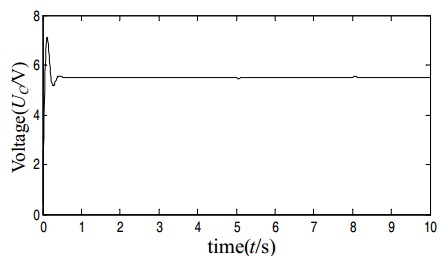
Рисунок 2 – Выходное напряжение с адаптивным управлением скользящим режимом заднего хода
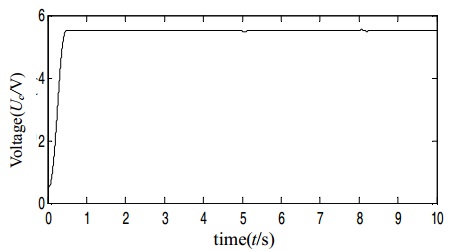
Рисунок 3 – Управление режимом скольжения терминала на основе адаптивной поддержки (T = 0.5 с)
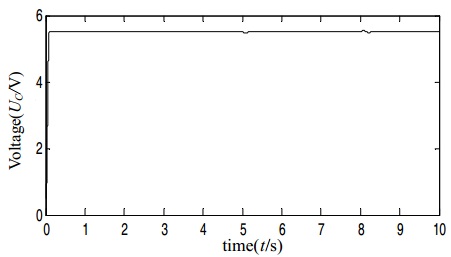
Рисунок 4 – Управление режимом скольжения терминала на основе адаптивной поддержки (T = 0.1 с)
Из этих кривых мы можем найти преимущество схемы управления скользящим режимом терминала на основе адаптивного обратного шага. Предложенная схема, объединяющая адаптивный режим обратного шага с режимом скольжения терминала, полезна, она преодолевает перерегулирование в процессе переходного состояния и позволяет системе достичь быстрое состояние, а также делает систему устойчивой к помехам.
5 Выводы
Новая схема, объединяющая адаптивное управление скользящим режимом обратного хода с управлением скользящим режимом терминала, может не только заставить систему адаптировать факторы неопределенности, но также может заставить систему достигнуть устойчивого состояния в течение ограниченного времени. Он имеет много очевидных преимуществ по сравнению с этими двумя симплексными методами и другими традиционными схемами управления скользящим режимом.
Список использованной литературы
1. S. Tan, Y. Lai, M.K.H. Cheung, and C.K. Tse, On the practical
design of a sliding mode voltage controlled buck converter
, IEEE
Transactions on Power Electronics, vol. 20, no. 2, pp 425–437, 2005.
2. D Cortes, J Alvarez. Robust sliding model control for the boost
converter
, Proceedings of VIII IEEE International Power Electronics
Congress, pp 208-212, October 2002.
3. S. Tan, Y.Lai, et al. An adaptive sliding mode controller for buck
converter in continuous conduction mode
, IEEE Nineteenth Annual
on Applied Power Electronics Conference and Exposition, vol.3, pp
1395–1400, september 2004.
4. S. Lin, C. Tsai. Adaptive backstepping control with integral action
for pwm buck DC-DC converters
, Journal of the Chinese Institute of
Engineers, Vol. 28, No. 6, pp. 977–984, 2005.
5. J. Tsai and Y. Chen. Sliding mode control and stability analysis of
buck DC-DC converter
, International Journal of Electronic, Vol. 94,
No. 3, pp 209–222, March 2007.
6. D. Zhao, S. Li, F. Gao. A new terminal sliding mode control for
robotic manipulators
, International Journal of Control, vol. 82, pp
1804–1813, October 2009.
7. Y. Feng, X. Yu, et al. Non-singular terminal sliding mode control of
rigid manipulators
. Automatica, vol. 38, pp 2198–2203, 2002.
8. E. Aroudi, A. Robert, B. Leyva, er al. Sliding mode control of a high
voltage DC-DC buck converter
, Proceedings of the 2005 European
Conference on Circuit Theory and Design, vol. 3, pp 55–59, October
2005.
9. C. Chiu, Y. Lee and C. Yang. Terminal sliding mode control of
dc-dc buck converter
, Proceedings of International Conference on
Control and Automation, vol. 65, pp 79–86, December 2009.