
Зміст
- Вступ
- 1. Опис об'єкта керування
- 2. Методи демпфування
- 2.1 Без корекційних зворотніх зв'язків
- 2.2 З корекційними зворотніми зворотніми зв'язками та налаштування за модульним отпимумом.
- Висновок
- Перелік джерел
- 2.2 З корекційними зворотніми зворотніми зв'язками та налаштування за модульним отпимумом.
1. Вступ
Наявність пружних ланок в механічнії частини, є причиною коливань в системі, що відображується на якості перехідних процесів, що надалі веде до зростання електричних динамічних навантажень, і також создає додаткові механічні навантаження що в кінцевому рахунку може відобразитися на терміні служби обладнання.
Метою дослідження є порівняння методів демпфування і реалізація системи на практиці.
2. Опис об'єкта керування
Об'єкт керування – механізм переміщення моста мостового крана.
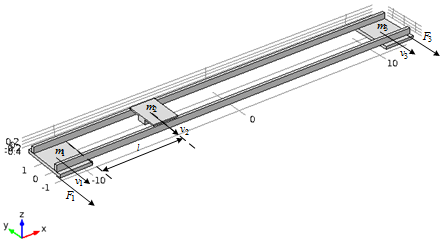
Рисунок 1 – Об'єкт керування
Для спрощення схеми, уявімо міст у вигляді двох цілісних металевих профілів з перетином прямокутної форми і пониженої щільності і зменьшеного значення модуля пружності матеріалу так, щоб вага конструкції приблизно відповідала реальним даним. Далі розташуємо візок посередині моста і докладемо до крайніх частинах нашої конструкції зусилля, яке відповідає розгону моста до швидкості 0.5 м / с за 1 с при відпрацюванні трапеціодального закону зміни швидкості.
Зміни швидкостей крайніх точок моста v1 і візки v2, які знаходиться в його середній точці, наведені на графіках рис.2. Видно, що точки конструкції здійснюють незгасаючі коливання, які поступово погіршують міцність і надалі можуть стати причиною виходу крана з ладу, а також травм працівників.
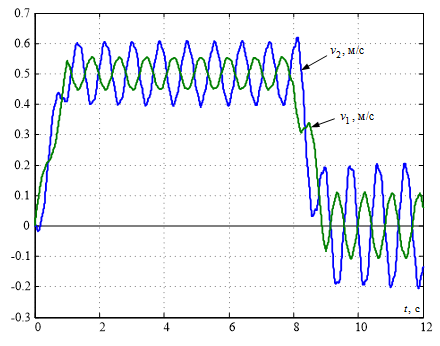
Рисунок 2 – Перехідні процеси швидкостей руху пружної конструкції мостового крана
Для зменшення незатухаючих коливань потрібно синтезувати відповідну систему керування швидкістю переміщення моста, для цього необхідна наявність лінійної математичної моделі об'єкта регулювання.
Математичну модель об'єкта можна скласти на основі кінематичних схем багатомасових систем (приведені на рис. 3).
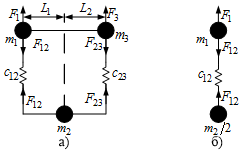
Рисунок 3 – Кінематична модель моста
На рис.3а міст представлений у вигляді трьох зосереджених мас – крайніх точок m1 і m3, пов'язаними пружнними зв'язками з коефіцієнтами жорсткості с12 і с23 з точкою m2, в якій знаходиться візок.
Якщо розташувати візок посередині моста (L1 = L2), то коефіцієнти жорсткості пружних зв'язків необхідно задати однаковими. Якщо при такому розташуванні елементів рівні між собою і маси , зосереджених на кінцях моста, та додані до них сили, на однаковій відстані від опор, маси яких дорівнюють, то кінематичну схему нашого об'єкта керування можна спростити до двухмассовой, залишивши одну опору і центральну точку, масу якої необхідно зменшити в 2 рази. Кінематична схема для цього випадку представлена на рис.3б. Її математичний опис буде мати такий вигляд:
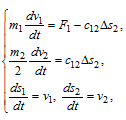
де F1 - сила, прикладена до першої масі, F12 - пружна сила, Δs2 = s1-s2 - величина пружної деформації.
Якщо ми знаємо значення зосереджених мас і постійної часу пружних коливань двухмассовой системи T12 = 1/2 / π / f, то ми зможемо розрахувати коефіцієнт жорсткості:
Де:
Так, використовуючи деякі спрощення, ми перетворили складну трехмассовую кінематичну систему в більш просту двомасових модель, на якій буде набагато легше проводити досліди і реалізовувати систему керування з метою гасіння пружних коливань.
2. Методи демпфування
2.1 Порівняння системи підпорядкового регулювання швидкості з коригуючими зворотними зв'язками і без.
Маючи наближену модель об'єкта регулювання синтезуємо систему керування швидкістю. Для керування приводами коліс моста використовуємо систему підпорядкового регулювання швидкості. Контур струму виражений у вигляді апериодических звен з постійними часу Тт.
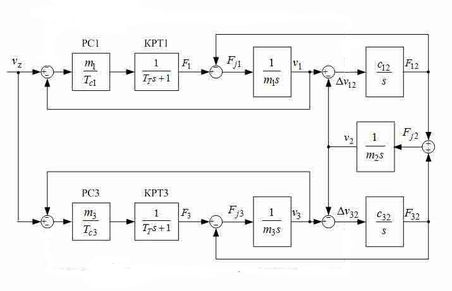
Рисунок 4 – Структурна схема системи підпорядкового регулювання швидкості трьохмасового об'єкта без зворотного зв'язку.
Візьмемо такі значення ТT = 4мс, Тс1 = Тс2 = 2 ТТ. Приймемо що довжина моста L = 20 м, а візок розташована на відстані l = 8 м від лівого краю моста де розташована маса m1. Отримуємо наступні графіки:
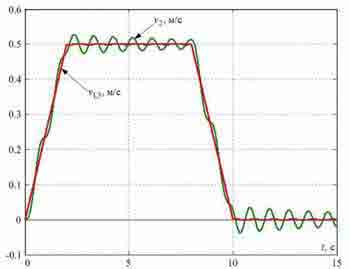
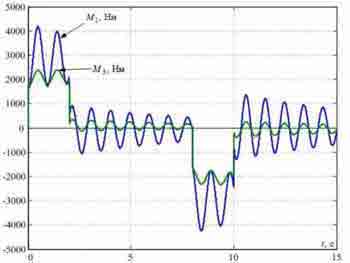
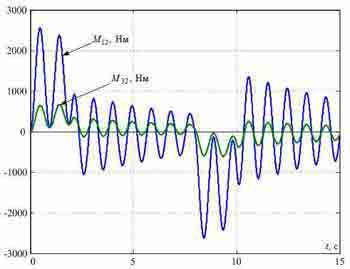
Рисунок 5 — Перехідні процеси в типовій СПРС, синтезованої без урахування пружності металевих конструкцій..
На графіках видно пружні коливання повільно згасають. Їх можна зменшити додавши коригувальні зворотні зв'язки двох мас заведенних на вхід регулятора:
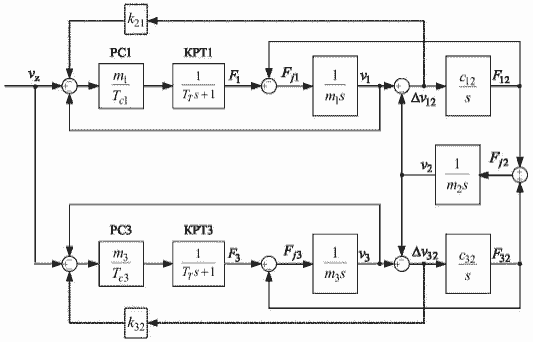
Рисунок 6 – Структурна схема системи підпорядкового регулювання швидкості трьохмасового об'єкта
З урахуванням пружних металевих конструкцій:
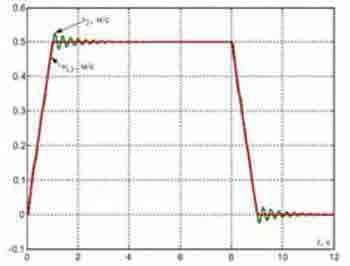
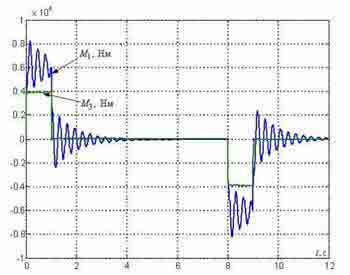
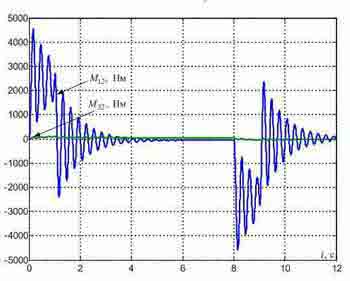
Рисунок 7 — Перехідні процеси в типовій СПРС, синтезованої c урахуванням пружності металевих конструкцій.
2.2 Система підпорядкованого регулювання швидкості з коригуючими зворотними зв'язками по різницям швидкостей рухомих мас з оптимізацієй замкнутих контурів швидкості по модульному оптимуму
Наступним методом демпфування пружних коливань в двомасових системах є введення зворотних зв'язків для визначення різниці швидкостей переміщення мас з оптимізації замкнутих контурів швидкості по модульному оптимуму. Скористаємося цим методом для трехмассовой системи рис.6.
Для початку розглянемо структурну схему трехмассовой системи рис.8, где F1, F2, F3 – сила, створювана приводними двигунами коліс; F12 F32 – пружні сили взаємодії зосереджені мас, c12, c32 - коефіцієнти пружності; v1, v2, v3 – швидкість точок, в яких розташовуються маси m1, m2, m3.
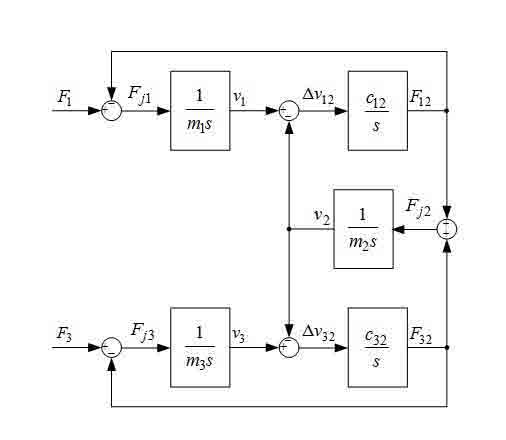
Рисунок 8 – Структурная схема трехмассовой системы
У системі використовується два електропривода, отже необхідно визначити дві постійні часу для регуляторів швидкості та два коефіцієнта зворотного зв'язку.
Оптимізувати замкнутий контур швидкості будемо по модульному оптимуму. Запишемо передавальну функцію від завдання на швидкість до швидкості другої маси:

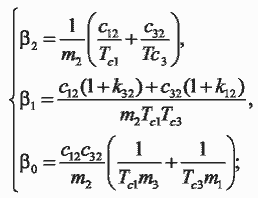

– частоти коливань рухомих мас;

– частоти власних пружних коливань автономних двомасових систем з зосередженими масами m1-m2 і m3-m2;

– корінь характеристичного полінома трехмассовой системи;

– частоти власних пружних коливань трехмассовой системи. Для отриманої передавальної функції складаємо рівняння, яке забезпечить досягнення модульного оптимуму. Для визначення постійних часу Tc1, Tc3 і коефіцієнти зворотних зв'язків k12, k32, потрібно вирішити систему з 4-х рівнянь з 4-ма невідомими:
Для початку можна використовувати значення коефіцієнтів зворотних зв'язків і постійних часу які ми отримали при оптимізації двомасових систем.
Досліджуємо процес демпфування пружних коливань. Візьмемо такі параметри об'єкта регулювання m1 = m2 = m3 = 20, c12 = 4000, і c32 = 2 * c12. Результат видно на рис.9 а). Також розрахуємо параметри для таких значень 1) m1 = 5 кг m2 = m3 = 20кг, c32 = 2 * c12; 2) m1 = 60 кг, m2 = m3 = 20, c32 = 2 * c12. Результат на рис.9 б), в).
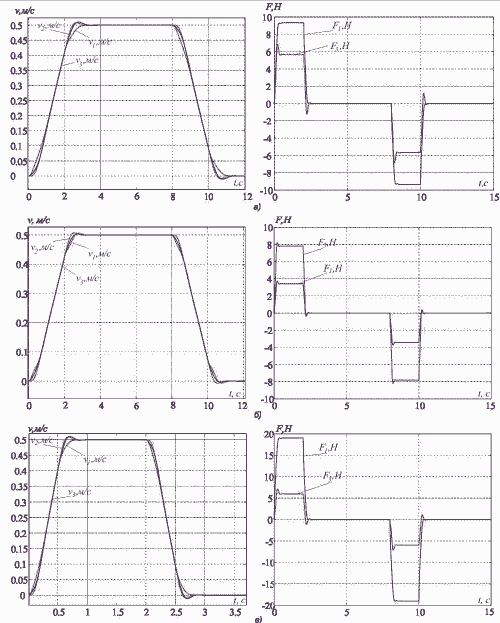
Рисунок 9 – Графіки перехідних процесів системи підлпорядкового регулювання.
Реалізовувати систему усунення коливань будемо в програмному пакеті для динамічного моделювання технічних систем SimInTech. Основними напрямками використання SimInTech є створення моделей, проектування алгоритмів керування, їх налагодження на моделі об'єкта, з подальшою генерацією вихідного коду на мові Сі для програмованих контролерів. Зокрема в проекті використовується контролер STM32f407VET6. Частота тактирования становить 168МГц, обсяг Flash-пам'яті становить 512 кбайт, 128 кбайта SRAM-пам'яті. Продуктивності даного контролера цілком достатньо для наших завдань. Також крім контролерам нам знадобиться 3-х осьовий акселерометр для отримання сигналу зворотного зв'язку з рухомих мас.
Реализовывать систему устранения колебаний будем в программном пакете для динамического моделирования технических систем SimInTech. Основными направлениями использования SimInTech являются создание моделей, проектирование алгоритмов керування, их отладка на модели объекта, с последующей генерацией исходного кода на языке Си для программируемых контроллеров. В частности в проекте используется контроллер STM32f407VET6. Частота тактирования составляет 168МГц, объем Flash-памяти составляет 512 кбайт, 128 кбайта SRAM-памяти. Производительности данного контроллера вполне достаточно для наших задач. Также помимо контроллерам нам понадобится 3-х осевой акселерометр для получения сигнала обратной связи с движущихся масс.
Висновки
- Толочко О. І., Коцегуб П. Х., Федоряк Р. В. Дослідження впливу середньогеометрічного кореня характеристичного полінома на властивості системи модульного керування двомасовим електромеханічним об‘єктом // Наукові праці ДонДТУ. Серія „Електротехніка і енергетика”. – Донецьк: ДонДТУ. – 2002. – №41. – С. 146-155
- Александров Е. Е., Кузнецов Б. И., Радиевский А. Е., Тернюк Н. Э. Оптимизация электромеханических систем с упругими связями. – Харьков: IMIC, 1995. – 304 с
- Коцегуб П. Х., Баринберг В. А., Толочко О. И., Федоряк Р. В. Оптимизация двухмассовых систем регулирования скорости // Известия вузов. Электромеханика. – 1998. – №4. – С. 54-57.
- Божко В. И. Бажутин Д. В. Подавление упругих колебаний в трёхмассовых электромеханических системах путем введения корректирующих обратных связей по разностям скоростей движущихся масс Перспективы развития электротехнических, электромеханических и энергосберегающих систем – 2016/ Материалы II международной научно-технической конференции студентов, аспирантов и молодых ученых. – Донецк, ДонНТУ – 2016, Том 2, с. 235-238
СПРС, синтезована без урахування пружних зв'язків демпфує коливання дуже слабо;
СПРС з додатковими корректирующими зв'язками по різниці швидкостей ефективно гасить пружні коливання, хоча і відрізняється дещо підвищеним перерегулюванням за сумарним пружного моменту і наявністю невеликого перерегулирования за швидкостями. Основною перевагою цієї системи є простота її реалізації, тому що всі сигнали зворотного зв'язку легко вимірюються.