ЭНЕРГОСБЕРЕГАЮЩИЕ ТЕХНОЛОГИИ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ И МОЩНОСТИ ИСКАЖЕНИЙ
Автор: А.Ю. Иванов, Г.Я. Михальченко, С.Г. Михальченко, В.В. Русанов, А.В. Федотов
Источник: Известия Томского политехнического университета. 2010. Т. 317. № 4
Обсуждаются вопросы разработки новых технологий компенсации не только реактивной мощности в распределительных сетях электрической энергии, но и мощности искажений, эмитируемой в сеть нелинейными нагрузками. Основное внимание концентрируется на вопросах решения задачи компенсации современными средствами силовой электроники и моделирования электромагнитных процессов
Введение: В литературе по энергетическим системам широко представлены материалы по создаваемым и уже реализованным технологиям компенсации реактивной мощности [1 – 3]. Под технологией компенсации реактивной мощности понимается процесс управления реактивной энергией для повышения качества электроэнергии, поскольку большинство таких проблем можно решить, контролируя реактивную мощность в текущем времени. В целом, задача компенсации реактивной мощности рассматривается в двух аспектах: компенсация в месте ее генерации и стабилизация напряжения сети [4],[5].
Цель компенсации реактивной мощности нагрузки состоит в том, чтобы увеличить величину коэффициента мощности устройства, сбалансировав активную мощность, потребляемую от источника переменного тока. Кроме того, компенсация реактивной мощности в передающих системах также повышает устойчивость системы переменного тока, увеличивая максимальную активную мощность, которая может быть передана. Это помогает сохранить стабильность напряжения на всех уровнях передачи энергии, что увеличивает КПД передачи, управляет установившимися и временными перенапряжениями, и, что не менее важно, появляется возможность избегать катастрофических отключений распределенных систем энергоснабжения.
Однако, повсеместное использование современных энергоемких технологий с нелинейными нагрузками, такими как управляемые выпрямители, мощные источники питания с бестрансформаторным входом, регулируемые полупроводниковые преобразователи частотно#регулируемых электроприводов и др., сопровождается генерацией в питающую сеть еще и мощности искажений и снижением качества электроэнергии уже по этой причине
Нелинейные искажения приводят к существенному росту дополнительных потерь генерирующих мощностей, снижению напряжения и пропускной способности линий электропередач, за счет перетоков энергии высших гармоник. Кроме того, резко сокращаются межремонтные сроки различного дорогостоящего оборудования, вызванные системной перегрузкой при пониженных значениях напряжения сети.
Для правильной оценки энергоэффективности такого рода преобразовательных устройств необходимо коэффициент мощности КМ рассчитывать как произведение косинуса угла сдвига первой гармоники тока относительно напряжения на коэффициент искажений KИ тока сети:
где
- KИ=Iэфф1 /Iэфф представляет собой отношение эффективного значения первой гармоники I1эфф несинусоидального тока к его эффективному значению Iэфф.
Проблема компенсации мощности искажений осложняется, прежде всего, противоречием между высокими скоростями изменений токов в нелинейных нагрузках и низким быстродействием мощных полупроводниковых приборов. Авторы выражают надежду, что разрешение этого противоречия теоретически обосновано и связано с созданием компенсаторов на основе многозонной многофазной импульсной модуляции [4],[5], называемой в зарубежных публикациях многотактной модуляцией [2]
Процессы компенсации реактивной мощности в месте ее генерации
Рассмотрим возможности компенсации реактивной мощности двойной модуляцией энергетического потока на примере реализации электропривода с асинхронным двигателем (АД) и импульсно#модуляционным преобразователем (ИМП1, ИМП2, рис. 1) с промежуточным звеном постоянного тока
В этом преобразователе переменное напряжение каждой фазы на входе преобразуется полностью управляемым выпрямителем ИМП1 в модулированное повышенной частотой напряжение, длительность импульсов которого изменяется в соответствии с управляющим воздействием  . Напряжения трех фаз суммируются, сглаживаются LCфильтром и образуют промежуточное звено постоянного тока. Напряжение конденсатора С преобразуется инверторными стойками преобразователя ИМП2 в многофазную систему напряжений с требуемыми параметрами в соответствии с управляющими сигналами , где i, j – текущие номера фаз выходных и входных напряжений соответственно.
. Напряжения трех фаз суммируются, сглаживаются LCфильтром и образуют промежуточное звено постоянного тока. Напряжение конденсатора С преобразуется инверторными стойками преобразователя ИМП2 в многофазную систему напряжений с требуемыми параметрами в соответствии с управляющими сигналами , где i, j – текущие номера фаз выходных и входных напряжений соответственно.
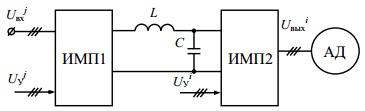
Рис.1 – Структурная схема электропривода с двойной модуляцией
Энергетический вход и выход каждой модуляционной ячейки ИМП1 и ИМП2 связаны между собой через коммутационную функцию  , вид которой определяется управляющим сигналом модуляционного преобразователя [3]:
, вид которой определяется управляющим сигналом модуляционного преобразователя [3]:
где
 – напряжение и ток входного источника;
– напряжение и ток входного источника; – напряжение и ток входного источника;
– напряжение и ток входного источника;- – коммутационные функции каждого ИМП, определяемые соответствующими сигналами .
При двойной модуляции симметричная многофазная система переменных напряжений  модулируется в общем случае симметричной многофазной системой управляющих воздействий той же частоты
модулируется в общем случае симметричной многофазной системой управляющих воздействий той же частоты  , где
, где  – глубина модуляции;
– глубина модуляции;  – фазовый сдвиг модулирующего воздействия.
– фазовый сдвиг модулирующего воздействия.
Вклад каждой j-й фазы в напряжение звена постоянного тока можно представить как:

Полученные таким образом напряжения разных фаз суммируются, и на конденсаторе фильтра выделяется напряжение  которое без учета падения напряжения на элементах фильтра будет равно
которое без учета падения напряжения на элементах фильтра будет равно
Полученное в звене постоянного тока напряжение подвергается вторичной модуляции в соответствии со второй системой управляющих сигналов

где индексам i соответствуют параметры, определяющие требуемые выходные напряжения с амплитудой  частотой
частотой  выходного напряжения и фазой
выходного напряжения и фазой 
Допустим, что требуется воспроизвести на выходе ИМП2 двухфазную систему переменных напряжений

а входная сеть задана трехфазной системой переменных напряжений

Воспользуемся известным приемом замены разрывной функции  ее первой гармоникой – непрерывной модулирующей функцией
ее первой гармоникой – непрерывной модулирующей функцией  [5]. Согласно алгоритму двойной модуляции, под действием управляющих воздействий, совпадающих по фазе с напряжением сети, на выходе блока ИМП1 будут действовать напряжения
[5]. Согласно алгоритму двойной модуляции, под действием управляющих воздействий, совпадающих по фазе с напряжением сети, на выходе блока ИМП1 будут действовать напряжения

которые суммируясь, образуют идеальное (без низкочастотных пульсаций) звено постоянного тока
По выражению в квадратных скобках можно видеть, что этот процесс сопровождается суммированием постоянных составляющих и взаимной компенсацией составляющих удвоенной частоты
Вторичная модуляция напряжения позволяет получить на выходе ИМП2 систему напряжений

Для наглядности рассмотрим случай двухфазной нагрузки с напряжениями смещенными друг относительно друга на 90°, т. е. угол  a
a  , тогда на выходе преобразователя ИМП2 действуют напряжения
, тогда на выходе преобразователя ИМП2 действуют напряжения
Пусть под действием этих напряжений в симметричной активно#индуктивной нагрузке протекают токи
где
 – фазовый сдвиг тока нагрузки относительно выходного напряжения.
– фазовый сдвиг тока нагрузки относительно выходного напряжения.
Каждая фаза вносит свой вклад в суммарный ток  звена постоянного тока, определяемый формулой
звена постоянного тока, определяемый формулой

В звене постоянного тока со стороны нагрузки будет протекать ток , равный сумме токов  . Нетрудно показать, что в этом звене присутствует постоянная составляющая тока, также не зависящая от времени и равная
. Нетрудно показать, что в этом звене присутствует постоянная составляющая тока, также не зависящая от времени и равная  а сумма переменных составляющих удвоенной частоты будет равна нулю за счет взаимной компенсации реактивных токов в звене постоянного тока.
а сумма переменных составляющих удвоенной частоты будет равна нулю за счет взаимной компенсации реактивных токов в звене постоянного тока.
С учетом сказанного, потребляемый из сети ток будет равен

Из последнего выражения следует, что из сети потребляется только активная составляющая тока многофазной нагрузки с амплитудой  , пропорциональная косинусу угла нагрузки, а реактивная составляющая тока нагрузки циркулирует между фазами, обеспечивая формирование магнитного потока АД и замыкается в звене постоянного тока.
, пропорциональная косинусу угла нагрузки, а реактивная составляющая тока нагрузки циркулирует между фазами, обеспечивая формирование магнитного потока АД и замыкается в звене постоянного тока.
Реализация такого пути компенсации реактивной мощности в перспективе будет определяться производством интеллектуальных двигателей переменного тока со встроенными импульсно-модуляционными преобразователями.
Процессы компенсации мощности искажений в месте ее генерации
Компенсация мощности искажений сводится в общем случае к восстановлению синусоидальной формы потребляемого тока (активной его фильтрации), и одновременной стабилизацией напряжения сети. На рис. 2 приведены варианты структуры параллельного компенсатора, когда корректоры коэффициента мощности включаются также параллельно источнику несинусоидальных токов нагрузки с нелинейным сопротивлением Н.
Для создания такого рода статического компенсатора реактивной мощности и мощности искажений требуется всего один полупроводниковый импульсно-модуляционный преобразователь ИМП1 и суммирующий узел  При подключении ИМП1 к питающей сети через фильтрующие реакторы
При подключении ИМП1 к питающей сети через фильтрующие реакторы  (рис. 2, а), последний переводится в режим инвертора тока, а в качестве накопителя энергии используются электролитические или неполярные конденсаторы С, подключаемые к его выходу. Если ИМП1 представляет собой автономный инвертор напряжения (рис. 2, б), в качестве накопителя необходимо использовать индуктивность L, которая с точки зрения эксплуатационных свойств характеризуется исключительно высокой надежностью. Конденсаторы
(рис. 2, а), последний переводится в режим инвертора тока, а в качестве накопителя энергии используются электролитические или неполярные конденсаторы С, подключаемые к его выходу. Если ИМП1 представляет собой автономный инвертор напряжения (рис. 2, б), в качестве накопителя необходимо использовать индуктивность L, которая с точки зрения эксплуатационных свойств характеризуется исключительно высокой надежностью. Конденсаторы  выполняют здесь функцию фильтрации высокочастотных гармоник тока, определяемых частотой коммутации ключевых элементов ИМП1.
выполняют здесь функцию фильтрации высокочастотных гармоник тока, определяемых частотой коммутации ключевых элементов ИМП1.
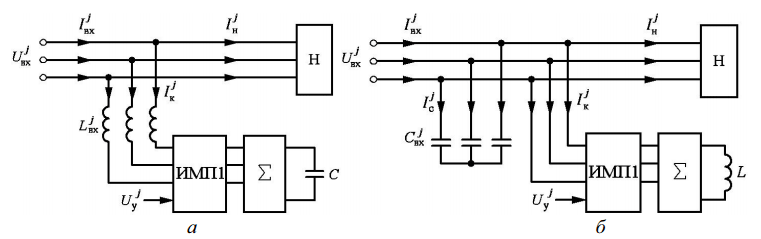
Рис.2 – Структура компенсатора с: а) емкостным и б) индуктивным накопителями энергии
Для компенсации токов, искаженных нелинейными элементами выпрямителей с реактивной нагрузкой на компенсатор возлагаются функции генерации синусоидальных токов в тех интервалах времени, когда нагрузка питается энергией накопителей, и функции поглощения мощности искажений в интервалах проводимости диодов выпрямителя.
Рассмотрим процесс компенсации мощности искажений на примере имитационной модели нелинейной нагрузки, представленной на рис. 3, где нелинейная нагрузка НН представлена выпрямителем VD1–VD6 c LC#фильтром, преимущественно емкостного характера. Моделирование реализовано при следующих допущениях:
- питающая сеть представлена идеальным источником трехфазного напряжения;
- силовая часть выпрямителя и компенсатора выполнена на идеальных ключах без потерь.
Двухконтурная система управления стабилизацией выходного напряжения компенсатора и контур компенсации токов нагрузки выполнена в виде аналитических функциональных уравнений обратных связей с пропорциональными регуляторами.
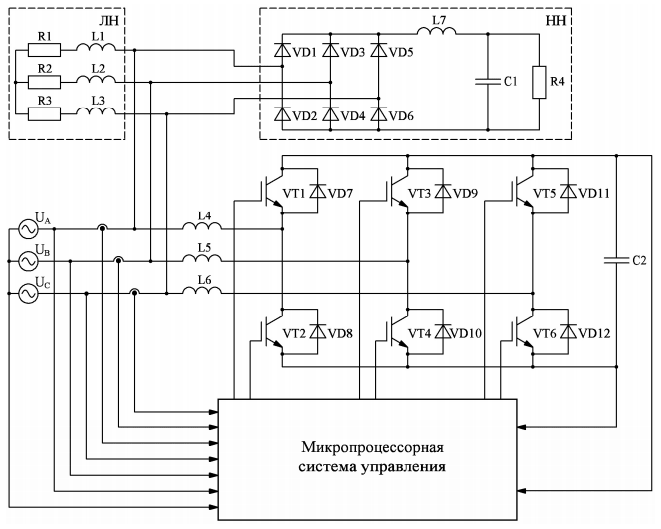
Рис.3 – Имитационная модель с нелинейной выпрямительной нагрузкой. ЛН – линейная нагрузка
На рис. 4 приведены результаты моделирования электромагнитных процессов работы компенсатора, где представлены мгновенные значения напряжений сети и потребляемых из этой сети токов
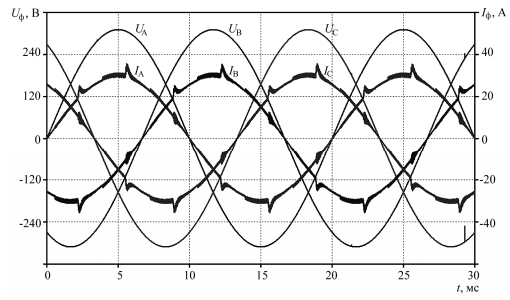
Рис.4 – Напряжения Uф и токи Iф трёх фаз распределительной сети
Механизм компенсации мощности искажений каждой фазы иллюстрируются рис. 5. Результаты моделирования показывают достигаемую эффективность компенсации мощности искажений: коэффициент мощности некомпенсированной нелинейной нагрузки Kм равен 0,65 и коэффициент гармоник тока сети Kг=116 %, в то время как с учетом компенсации эти значения достигают следующих величин: Kм=0,985 и Kг=9,6 %.
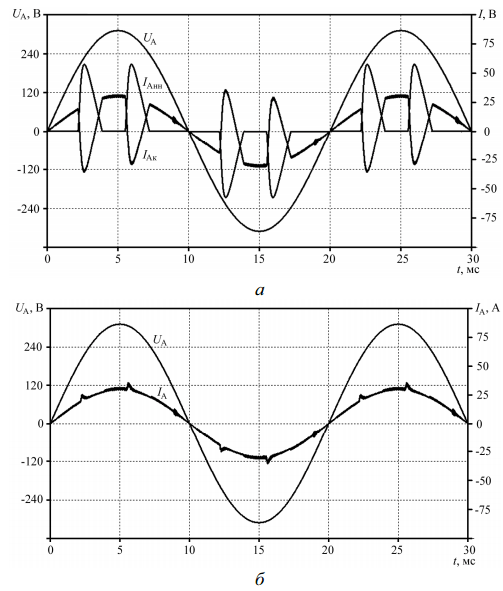
Рис.5 – Диаграммы напряжений и токов компенсатора мощности искажений: а) напряжение фазы А – UA, токи фазы А – нелинейной нагрузки IAнн, компенсатора IAк; б) напряжение фазы А – UА и ток распределительной сети фазы А – IА
Процессы компенсации реактивной мощности и мощности искажений
Как правило, распределительные сети загружаются всеми тремя составляющими мощности: активной, реактивной и мощностью искажений. Ниже представлены результаты моделирования с учетом активно-индуктивной нагрузки ЛН, которая в модели по рис. 3 учтена подключением ее к распределительной сети параллельно нелинейному выпрямителю и компенсатору. Мгновенные значения токов и напряжений, иллюстрирующие технологию компенсации нагрузки сложного характера, приведены на рис. 6.
В этом случае количественная оценка достигаемого эффекта компенсации реактивной мощности и мощности искажений показывает, что при исходной величине коэффициента мощности некомпенсированной комплексной нагрузки Kм, равной 0,56 и коэффициенте гармоник тока сети Kг=116 %, предельно достижимые значения этих показателей равны: Kм=0,99 и Kг=4,8 %.
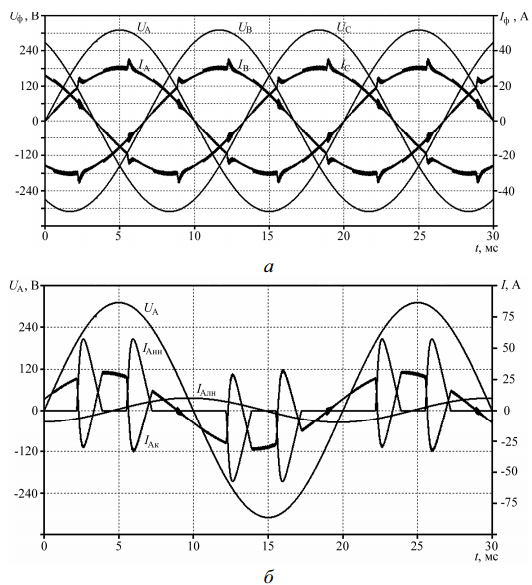
Рис.6 – Диаграммы напряжений и токов компенсатора с нагрузкой сложного характера: а) напряжения и токи трёх фаз распределительной сети; б) напряжение фазы А – UA и токи фазы А – линейной нагрузки IAлн, нелинейной нагрузки IAнн, компенсатора IAк
Выводы
- Двойная модуляция энергетического потока является эффективным средством компенсации реактивной мощности и мощности искажений в месте ее генерации, поэтому в перспективе неуправляемые потоки мощности могут быть локализованы заменой энергоемких нелинейных потребителей управляемыми выпрямителями импульсно модуляционного типа с коэффициентом мощности близким к единице.
- По результатам имитационного моделирования установлено, что токи, потребляемые нелинейными нагрузками, если и обеспечивают
 однако коэффициент мощности определяется в основном мощностью искажений и его численное значение не превышает значения Kм=0,65.
однако коэффициент мощности определяется в основном мощностью искажений и его численное значение не превышает значения Kм=0,65. - Технология компенсации реактивной мощности и мощности искажений импульсно-модуляционными преобразователями позволяет достигать в распределительных сетях практически предельных значений коэффициента мощности (Kм=0,99).
Список использованной литературы
- Кобзев А.В., Михальченко Г.Я., Музыченко Н.М. Модуляционные источники питания. – Томск: Радио и связь, 1990. – 336 с.
- Dixon J.W., Del Valle Y., Orchard M., Ortu' zar M., Mora'n L., Maffrand C. A Full Compensating System for General Loads, Based on a Combination of Thyristor Binary Compensator, and a PWMIGBT Active Power Filter // IEEE Transactions on Industrial Electronics. – 2003. – V. 50. – № 5. – Р. 982–989.
- Михальченко Г.Я., Стребков А.С., Хвостов В.А., Шумейко С.А. Промышленная электроника в энергосбережении. – Томск: Изд-во ТУСУР, 2007. – 248 с.
- Кобзев А.В. Многозонная импульсная модуляция. Теория и применение в системах преобразования параметров электрической энергии. – Новосибирск: Наука, 1979. – 304 с.
- Михальченко Г.Я. Двойная модуляция потока энергии при воспроизведении сигналов в многофазных преобразователях // Техническая электродинамика. – 1988. – № 5. – С. 34–43.
- Алейников О.А., Баушев В.С., Кобзев А.В., Михальченко Г.Я. Исследование локальной устойчивости периодических режимов в нелинейных импульсных системах // Электричество. – 1991. – № 4. – С. 16–21.
- Андриянов А.И., Михальченко Г.Я. Сравнительная характеристика различных видов ШИМ по топологии областей существования периодических режимов // Электричество. – 2004. – № 12. – С. 46–54.
- Михальченко Г.Я., Малаханов А.А. Математическая модель однофазного корректора коэффициента мощности // Доклады Томского государственного университета систем управления и радиоэлектроники. – 2008. – № 2 (18). – Ч. 2. – С. 143–149.
- Гаврилов А.А., Михальченко Г.Я., Михальченко С.Г. Нелинейная динамика преобразователей с многофазной импульсной модуляцией // Доклады Томского государственного университета систем управления и радиоэлектроники. – 2009. – № 2 (20). – С. 171–178.
- Бородин К.В., Михальченко С.Г. Математическое моделирование динамики инвертирующего DC/DC преобразователя напряжения // Доклады Томского государственного университета систем управления и радиоэлектроники. – 2008. – № 2 (18). – Ч. 2. – С. 150–156.