
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Загальні положення про СІФУ
- 3.1 Призначення СІФУ
- 3.2 Класифікація СІФУ
- 3.3 Принцип вертикального управління
- Висновки
- Перелік посилань
Вступ
Колосальний розвиток всіх галузей промисловості залежить від рівня автоматизації виробництва. Для автоматизації виробництв необхідні джерела механічної енергії різної потужності. На великих виробництвах в якості джерел механічної енергії виступають електродвигуни. Одним з найперших придуманих двигунів, але все ще актуальним, є двигун постійного струму.
1. Актуальність теми
Більшості виробництв для виконання складних технологічних процесів виробництва разом з двигуном необхідна і система управління цим двигуном або двигунами виконують одну і тугіше роботу. Така система забезпечує різні робочі механічні характеристики і забезпечує двигун потрібними вихідними параметрами (момент і швидкість обертання валу двигуна). Для управління двигуном постійного струму використовують тиристорний перетворювач і систему управління ім. Систему управління тиристорним перетворювачем двигуна постійного струму називають імпульсно фазовою через принцип її функціонування. Метою роботи є створення повноцінної СІФУ на базі плати STM3F4, яка забезпечить широкий діапазон регулювання ДПТ.
2. Мета і задачі дослідження та заплановані результати
Метою розробок і досліджень є трифазний нереверсивний тиристори перетворювач постійного струму виконаний по мостовій схемі.
Мета роботи – розробка системи імпульсно-вазового управління трифазним нереверсійним тиристорним перетворювачем постійного струму виконаним за мостовою схемою на базі плати STM32F4. Розробки виконувалися на підставі лекцій з систем управління тиристорними перетворювачами. Робота виконана з використанням методів математичного моделювання. Виконано моделювання системи імпульсно-вазового управління трифазним нереверсійним тиристорним перетворювачем постійного струму виконаним за мостовою схемою з застосуванням програмного пакету Matlab і його основного доповнення Simulink. В результаті розроблена модель системи імпульсно-вазового управління трифазним нереверсійним тиристорним перетворювачем постійного струму виконаним за мостовою схемою
3. Загальні положення про СІФУ
Силові електронні пристрої складаються з силової частини і системи управління (СУ). До силової частини відносяться електричні ланцюги і елементи, які безпосередньо беруть участь в передачі електричної енергії від первинного джерела до споживача. Іноді ці ланцюги спільно з силовими елементами називають головними, так як вони визначають основні техніко-економічні показники силового електронного пристрою і, в першу чергу, його ККД. Силова частина апарату є силовим виконавчим органом, що визначає головні функції перетворювача. Наприклад, силова частина однопівперіодного тиристорного випрямляча складається з одного тиристора і електричних з'єднань, що забезпечують його зв'язок з комутованій електричної ланцюгом. З огляду на визначальний вплив силової частини на техніко-економічні характеристики пристрою в цілому, її вивченню приділяють основну увагу. Для функціонування силових транзисторів, тиристорів та інших приладів на них необхідно подавати відповідні сигнали управління. Ці сигнали формуються системою управління, яка обробляє і видає інформацію, а також формує імпульси управління електронними ключами силової частини схеми. Тому СУ складається з елементів і функціональних вузлів, пов'язаних з обробкою інформаційних потоків і формуванням імпульсів управління. При цьому споживану СУ енергію прагнуть по можливості мінімізувати. До системи управління належать також елементи і вузли, що забезпечують поточний контроль стану пристрою в цілому, діагностику відмов і управління захисними пристроями.
На малюнку 1.1 в узагальненій структурній схемі виділені деякі функціональні блоки. Блок датчиків Д містить датчики регульованих і контрольованих параметрів. Так як зазвичай регулюються вихідні параметри, то частина датчиків безпосередньо входить у зворотний зв'язок каналу регулювання. Сигнали від цих датчиків надходять на регулятор РЕГ, у функції якого входить формування закону керування елементами силової частини.
Формувач імпульсів управління ПІБ є узгоджувальним пристроєм між входами силових приладів і виходом регулятора. Блок ФІБ формує імпульси управління, безпосередньо надходять на силові елементи. Сигнали регулятора є сигналами малої потужності і не відповідають вимогам, що пред'являються до імпульсів керування силових приладів (тиристорів, транзисторів та ін).
Формувач імпульсів управління, функціонально, а часто і конструктивно закінчений пристрій, називають також драйвером
(drive – водити).
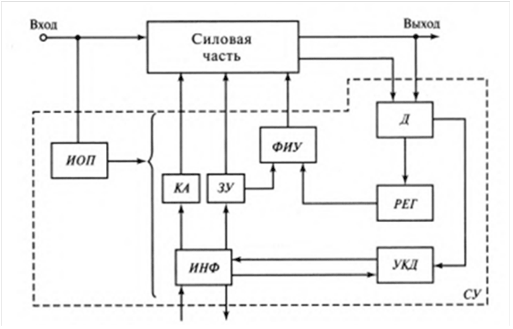
Рисунок 1.1 – Узагальнена структурна схема системи управління
3.1 Призначення СІФУ
Система імульсно-фазового управління (СІФУ) перетворювального пристрою призначена для генерування та розподілу імпульсів управління певної тривалості і форми, розподілу їх по відповідних фазах у багатофазних системах та зміни моменту подачі цих імпульсів на керуючі електроди тиристорів перетворювача. У перетворювальних пристроях знаходять застосування напівкеровані силові напівпровідникові прилади (СПП) - тиристори, сімістори, повністю керовані СПП – замикаються тиристори GTO, IGCT, а також транзистори IGBT. Основним завданням СІФУ є перетворення аналогового сигналу в імпульсні сигнали управління по куту, регулювання середньої випрямленої напруги Uтп тиристорного перетворювача (ТП) в залежності від рівня, полярності напруги управління Uу, тобто формування вихідної напруги ТП відповідно до рівняння:
де К – коефіцієнт передачі ТП, що не залежить від режиму роботи мережі живлення і навантаження в ланцюзі випрямленого струму.
Система імпульсно-фазового керування ТП повинна створювати синхронізовану з напругою мережі систему імпульсів, зсунуту в часі залежно від величини керуючого впливу, з метою регулювання вихідної напруги (струму).
Вимоги, що пред'являються до СіФУ, визначаються низкою факторів:
- фізичними процесами в напівпровідникових приладах,
- особливостями самої схеми перетворювача,
- особливостями навантаження.
Таким чином, СІФУ повинна забезпечувати:
- достатню амплітуду і струм керуючих імпульсів, обирану для тиристорів по діаграмі управління;
- достатню крутизну керуючих імпульсів (не менше 0,5 – 1,0 А/мкс). Крутизна особливо важлива при паралельному і послідовному з'єднанні тиристорів;
- необхідний діапазон регулювання кута управління в залежності від призначення перетворювачів. Так, наприклад, при активному навантаженні максимально можливий діапазон регулювання для однофазних випрямлячів повинен становити 180 ел. град, для трифазного випрямляча з нульовим висновком-150 ел. град, для трифазного мостового випрямляча – 120 ел. град;
- достатню тривалість керуючих імпульсів: а) з точки зору фізики роботи тиристора – 20 мкс; б) виходячи з особливостей схеми, у трифазній мостовій схемі потрібно тривалість імпульсів понад 60 ел.град, чи потрібно застосовувати здвоєні імпульси; в) виходячи з особливостей навантаження, при активно-індуктивному навантаженні з великою індуктивністю необхідно застосовувати довгі імпульси (120 ел. град в трифазних схемах);
- Гальванічне розділення виходу СІФУ і керуючого переходу силового тиристора;
- достатня швидкодія, щоб за час до включення чергового тиристора в повному діапазоні зрушив керуючий імпульс (не більше 3 ... 6 мс);
- достатню симетрію керуючих імпульсів (допустима не симетрія менше 1 –2 ел. град);
- високу завадостійкість як з боку інформаційного входу, так і з боку мережі (СІФУ повинна зберігати свою працездатність у частотному діапазоні сигналів завад від 50 до 1200 Гц, допустимі комутаційні провали напруги мережі 100% на 5 ел.град.)
У СІФУ застосовуються керуючі імпульси малої і великої тривалості, а також імпульси з високочастотним заповненням (імпульсний пакет»). Імпульси малої тривалості (рисунок 1.3 а), як правило, не перевищують 20 ел. град. Сигнали управління великої тривалості (рисунок 1.3 б) мають tі на рівні 120 ел. град, а їх підсилювачі потужності в першу чергу характеризуються високими масогабаритними показниками імпульсного трансформатора. Для усунення даного недоліку застосовуються імпульси з високочастотним заповненням (малюнок 1.3), коли протягом необхідного інтервалу часу tі на керуючий електрод вентиля подається «пакет», який складається з серії високочастотних імпульсів тривалістю tі*, залежить від динамічних характеристик тиристора і вибирається з умови tі = (3...5)х t вкл , де t вкл – час включення тиристора при максимальному анодному струмі (Рисунок 1.3).
Рисунок 1.2 – Залежність вихідної напруги від часу подачі сигналу управління
Малюнок анімований. Кількість кадрів дорівнює 5. Розмір 26,2 Кб
При пакетному
управлінні інтервал паузи tп між сусідніми імпульсами не більше 0,5 х tвикл, де tвикл - час виключення тиристора при максимальному анодному струмі. Як правило, tвикл = 10 х tвкл , тому вважають, що tі = tп = (3 ... 5) х tвкл.

Рисунок 1.3 – Форми імпульсів управління тиристорами
3.2 Класифікація СІФУ
За принципом дії СІФУ поділяються на:
- Електронні (напівпровідникові), побудовані на серійних інтегральних мікросхемах аналогового (дискретного) і цифрового типу з малим ступенем інтеграції.
- залежно від того, як виробляються Керуючі імпульси для кожного тиристора перетворювача-одним електронним блоком або окремими блоками-системи управління поділяються на одне - і багатоканальні.
- За способом зміни фази керуючого імпульсу СИФУ поділяються на горизонтальні, вертикальні і з цифровим управлінням.
- За способом синхронізації з напругою мережі СІФУ бувають синхронні (Кут відкриття тиристорів відраховується від напруги певної фази мережі) і асинхронні (відраховується від моменту надходження попереднього імпульсу управління).
- Електромагнітні, з використанням електромагнітних пристроїв, що формують імпульси в момент переходу феромагнітних матеріалів в насичене стан. До таких систем можна віднести системи з пік-трансформаторами, пік-дроселями, імпульсними трансформаторами, що насичуються на базі сердечників з різко вираженим коліном кривої намагнічування (ППГ), однополуперіодними магнітними підсилювачами.
Такі системи випускалися в 80–ті роки двадцятого сторіччя і до цього часу експлуатуються в складі перетворювачів технологічного обладнання промислових об'єктів.
3.3 Принцип вертикального управління
Типові СІФУ за принципом управління діляться на системи з вертикальним
і горизонтальним
управлінням. При вертикальному принципі управління (рисунок 1.4) Напруга управління порівнюється з опорною змінною напругою (синусоїдальною, пилкоподібною і т. д.).
У момент часу, коли ці напруги стають рівними і їх різниця змінює полярність, відбувається формування імпульсу. Фазу імпульсу можна регулювати, змінюючи величину постійної напруги керування.
Принцип вертикального
управління, застосовуваний в більшості СІФУ. З діаграм видно, що опорна напруга може бути, як пилкоподібним, так і синусоїдальним (косинусоїдальним) (малюнок 1.3).
Отримати стабільне опорне пилкоподібне напруга простіше, тому що воно може бути отримано за допомогою інтегратора і додаткового транзистора, розряджає ємність при живленні від джерела стабільного постійної напруги.
Отримати стабільну косинусоїдальну напругу, синхронізовану мережею, важко через коливання напруги мережі і спотворення його форми.
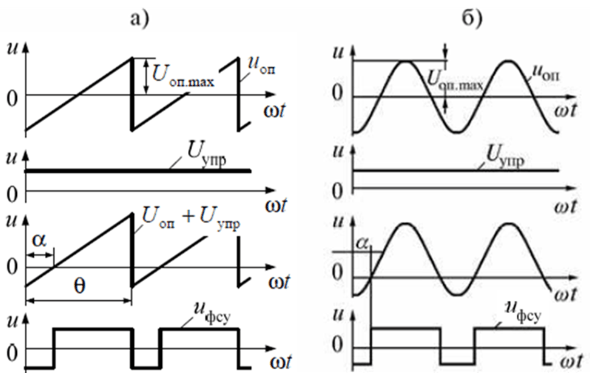
Рисунок 1.3 – Діаграми напруг пилкоподібне а) і косинусоїдальне б)
У системах з вертикальним
управлінням сигнал розгортки (або вхідний сигнал) зміщуються один щодо одного у вертикальній площині, що зображено на рисунку 1.4.
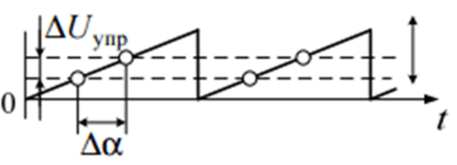
Рисунок 1.4 – Тимчасові діаграми сигналів при вертикальному
принципи управління СІФУ
4. Висновки
В даній роботі була розроблена і створена модель системи імпульсно-фазового керування нереверсійним трифазним випрямлячем, зібраним в мостову схему, в середовищі Matlab. Після успішного моделювання, модель СІФУ була завантажена в мікроконтролер плати STM32F4. Для перевірки працездатності СІФУ з ніжок плати були зняті сигнали управління тиристорами. Імпульси відповідали пред'явленим до них вимогам.
Перелік посилань
- MATLAB Documentation - MathWorks: [Електронний ресурс]. Режим доступа: https://www.mathworks.com/(Дата обращения: 05.05.2017).
- User manual. STM32F4DISCOVERY [Електронний ресурс]. Режим доступа: http://www.st.com/ (Дата обращения: 05.05.2017).
- Системи управління ведених перетворювачів [Електронний ресурс]. Режим доступа: http://elprivod.nmu.org.ua/ (Дата обращения: 05.05.2017).
- Підручник для ВНЗ
Силова електроніка
Ю.К. Розанов, М.В. Рябицький, А.А. Кваснюк. - STM32 ST-LINK utility для програматора/відладчика ST-LINK/V2. [Електронний ресурс]. Режим доступа: http://firsthand.ru/ (Дата обращения: 10.05.2017).
- Схемне пристрій для розпізнавання мережевих переходів через нуль [Електронний ресурс]. Режим доступа: http://www.freepatent.ru/(Дата обращения: 20.05.2017).
- Методи і пристрої управління тиристорами. [Електронний ресурс]. Режим доступу: http://altay-krylov.ru/ (Дата обращения: 20.05.2017).