Дефицит и высокая стоимость энергетических ресурсов на рынках мира стимулирует внедрение энергосберегающих технологий. Не исключением в этом является и Украина. Как следствие, очевидна необходимость применения в промышленной и бытовой практике электромеханического оборудования, которое фактически реализует принцип энергосбережения. Одним из направлений такой реализации следует назвать применение различных преобразовательных устройств, обеспечивающих, помимо регулирования координат электропривода, возможность включения режимов экономии электрической энергии. Известно, что такие режимы допускают сохранить до 50% потребляемых ресурсов. Принимая во внимание сказанное, можно утверждать, что актуальность задачи использования преобразовательных устройств не может ставиться под сомнение.
Применительно к современному автоматизированному электроприводу задачи управления могут быть разбиты на две составляющие. К ним следует отнести вопросы гарантированного мягкого запуска и обеспечения защитных функций от возможных аварийных ситуаций. Вторая категория вопросов связана с регулированием крутящего момента и частоты вращения выходного вала приводных двигателей, обеспечивая, таким образом, рациональные технологические и энергетические режимы работы оборудования. Первая категория, как правило, осуществляется с помощью релейно-контакторных магнитных станций управления или устройств плавного пуска, которые иногда называют «софтстартерами». Магнитные станции управления, несмотря на их реализацию с помощью современной элементной базы, морально устарели. Сегодня предпочтительней являются устройства плавного пуска, которые фактически представляют собой тиристорные регуляторы переменного напряжения, управляемые цифровыми средствами автоматизации. Что же полностью регулируемого электропривода, то на современном этапе уверенное первенство держат электроприводы переменного тока, управляемые частотными преобразователями при скалярном, трансвекторном или прямом управлении моментом.
Регулируемый преобразователь переменного напряжения состоит из силового блока и системы импульсно-фазового управления (рис. 1).
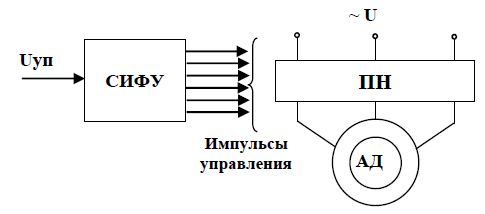
Рис. 1. Структурная схема тиристорного преобразователя напряжения
Это разомкнутая система с асинхронным электроприводом переменного тока, где регулирование напряжения выполняется путем смещения импульсов управления в функции фазы напряжения синхронизации. Применение в преобразователе симметричных полууправляемых тринисторов допускает их открывание только в случае наличия импульса управления и прямого приложения напряжения на управляющих приборах, а разрыв силовой цепи возможен при наличии обратного напряжения на приборах и нулевого тока через них.
Современная цифровая система импульсно-фазового управления преобразователя напряжения (рис. 2) состоит из следующих блоков: БС – блока синхронизации; ТОФ – таймера отбивки фазы смещения импульсов; АЦП – аналого-цифрового преобразователя.
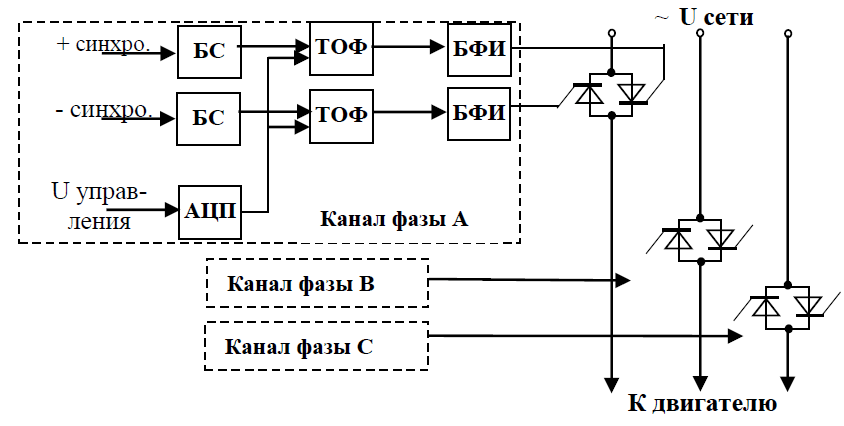
Рис. 2. Структурная схема СИФУ с фазным управлением импульсов отпирания
Схема БС, ведомая сетью электропитания, выделяет точку начала времени отсчета соответственно в положительной и отрицательной полуволне фазного напряжения и разрешает отбивку интервала отсчета фазы для смещения импульсов управления. Задание на необходимый уровень выходного напряжения преобразователя определяется кодом оцифровки напряжения на входе АЦП, который далее подается на входы загрузки реверсивного счетчика ТОФ. Вследствие инкрементирования кода в счетчике ТОФ до нулевого уровня происходит формирование управляющего импульса. Из-за малой длительности последнего открывание тиристоров преобразователя не всегда гарантировано. Поэтому БФИ выполняет функцию расширения импульса и согласования его мощности с мощностью элемента управления.
В настоящее время отработка схемных решений СИФУ на стадии проектирования и наладки может быть выполнена с помощью различных программных продуктов. Так, одна из возможностей моделирования может быть выполнена на базе программного продукта National Instrument компонента Multisim, который представляет собой электронную лабораторию. Программный продукт предлагает пользователю достаточно широкие возможности по наполнению элементной базы, комплекту приборов контроля статических и динамических процессов в электронных схемах.
Модель одного канала цифрового блока СИФУ регулятора переменного напряжения, построенная согласно структурной схеме рис. 2, показана на рис. 3.
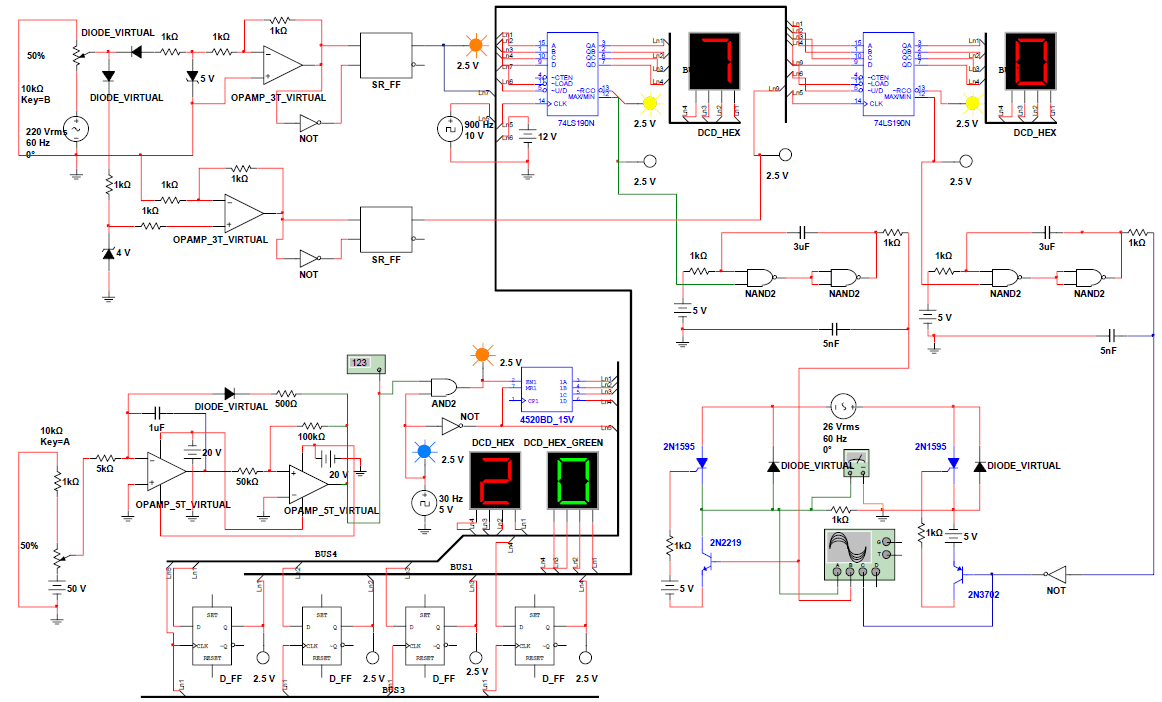
Рис. 3. Цифровая модель СИФУ регулятора переменного напряжения.
Она состоит из: схемы синхронизации; АЦП, построенного на базе преобразователя напряжения – частота, 4—х разрядного таймера, генератора и схемы разрешения замера и 4—х разрядного регистра хранения предыдущего измерения; реверсивного счетчика; формирователей длительности управляющего импульса и собственно преобразователя переменного напряжения. Наглядность процессов, происходящих в модели, может быть отслежена с помощью установленных в контрольных точках логических и семисегментных индикаторов. Помимо этого форма, длительность и фазы управляющих и выходных напряжений контролируются с помощью виртуального 4—х канального осциллографа. Результаты моделирования и регулирования выходного напряжения при работе преобразователя на активную нагрузку приведены на рис. 4. Позиции 1, 2 (рис. 4) показывают импульсы управления по каналам, а 3 выходного напряжения. Регулирование амплитуды на выходе преобразователя устанавливается напряжением по входу АЦП. Его величина пропорциональна площади под кривой 3 рис. 4.
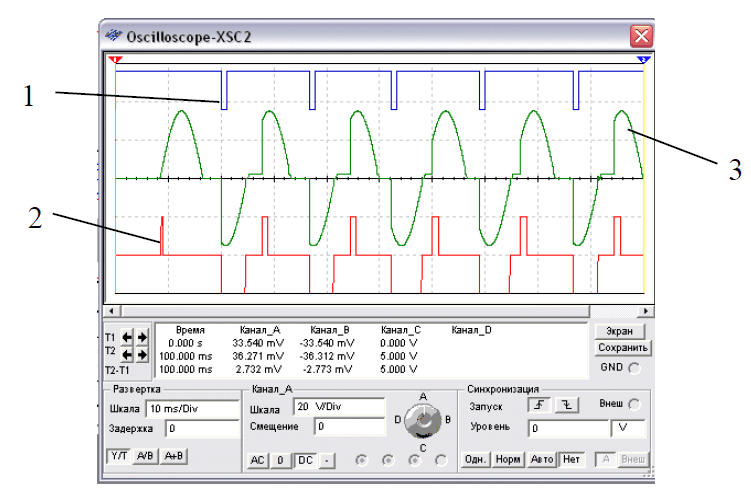
Рис. 4. Результат моделирования СИФУ (рис.3)
Известен и другой способ регулирования амплитуды выходного напряжения. Это широтно- импульсная модуляция (ШИМ), которую чаще всего реализуют на базе транзисторных преобразователей. В этом случае система импульсно-фазового управления несколько отличается от предыдущей, поскольку работает с полностью управляемыми ключами. Схема СИФУ представлена на рис. 5 включает в себя следующие составляющие: БС – блоки синхронизации; ГРС – генератор регулируемой скважности импульсов; УМ – устройства модуляции сигналов управления; БФИ – блок формирования импульсов и транзисторный регулятор. Принципиально амплитуда напряжений для обоих случаев определяется одинаково. Т.е., ее величина пропорциональна площади интервалов открывания ключей. ШИМ с СИФУ в сравнении с фазными схемами проще и естественно имеет большую надежность. В остальном обе системы управления можно считать равноценными.
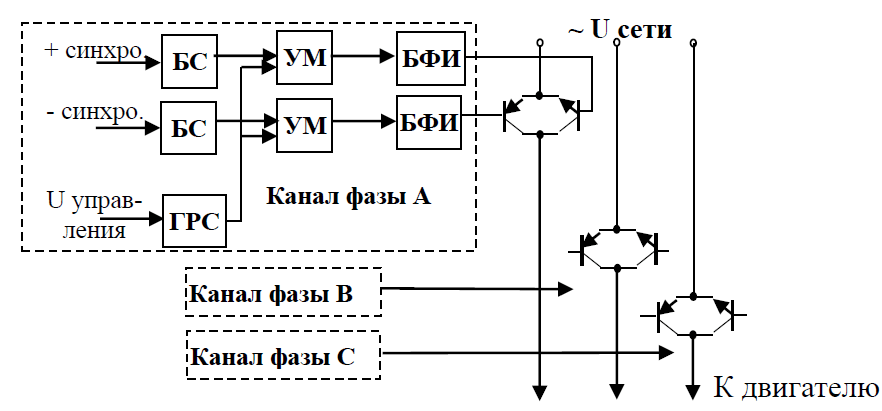
Рис. 5. Структурная схема СИФУ с широтно-импульсным управлением
Принципиальная схема модели СИФУ с ШИМ, изображенная на рис. 6, отличается от фазовой СИФУ наличием генератора прямоугольных импульсов с регулируемой скважностью (позиция 1), устройства модуляции (позиция 2) и блока формирования импульсов (позиция 3). Работа системы синхронизации с ШИМ подобна системе с фазным регулированием подачи управляющих импульсов. Модуляцию выполняют логические элементы типа «И». Известно, что для таких логических элементов активным является сигнал логического нуля. Соответственно наличие сигнала синхронизации позволяет прохождение импульсов генератора на соответствующий канал ключевого преобразователя. В целом блок формирования импульсов не содержит расширителей импульсов за их ненадобностью. Однако в связи с наличием в силовой части преобразователя транзисторов разной проводимости БФИ для разных каналов имеют разную структуру. В силовой части использованы диодные развязки, предотвращающие прикладывание обратных напряжений к коллекторно-эммитерным переходам. В модель также введены логические индикаторы, позволяющие контролировать прохождение импульсов открывания транзисторов
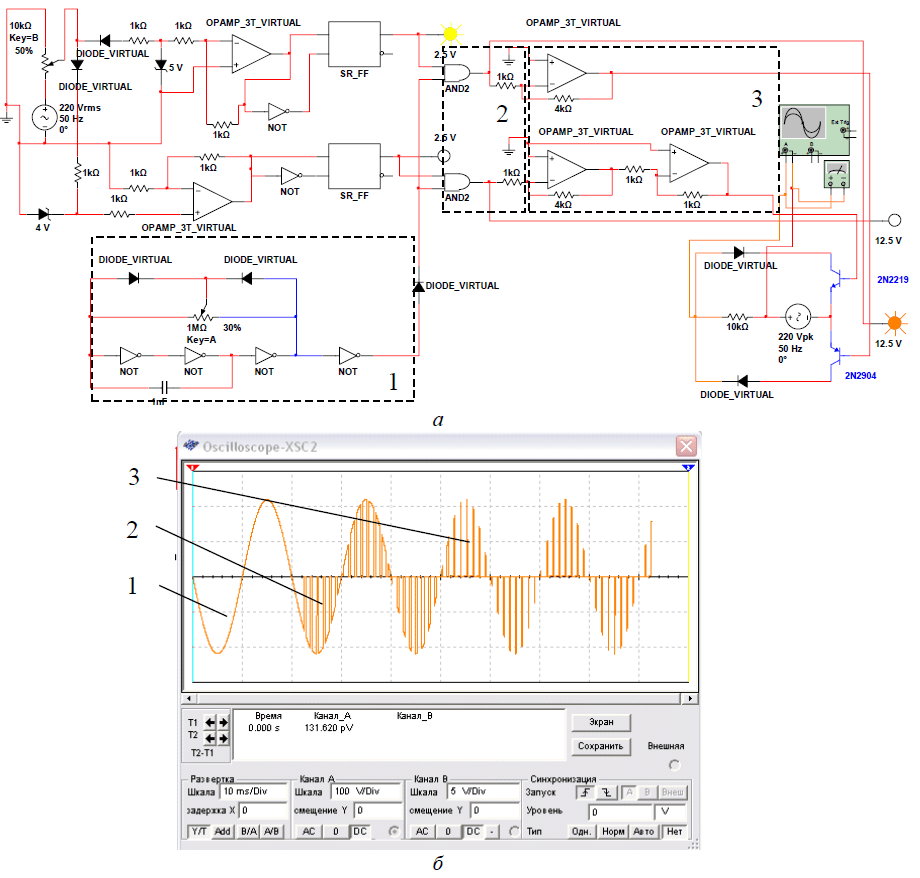
Рис. 6. Модель СИФУ с широтно-импульсным управлением
Моделирование СИФУ с ШИМ выполнено при работе преобразователя на активное сопротивление. В процессе моделирования регулировалась скважность генератора импульсов. На позиции 1 (рис. 6 б) показана ситуация, при которой практически отсутствуют импульсы генерации с одновременным нали-чием импульсов синхронизации. Случаи 2 и 3 иллюстрируют увеличение интервала времени нахождения ключей в выключенном состоянии, что сопровождается снижением уровня выходного напряжения.
Устройства регулирования напряжения в статорных цепях двигателей переменного тока, как упоминалось ранее, предназначены для обеспечения плавного пуска и никак не влияют на режимы регулирования параметров привода на протяжении выполнения ним технологических операций. Для решения задачи непрерывного управления используют преобразователи частоты (ПЧ). На данный момент известны два основных типа ПЧ. Это преобразователи частоты с непосредственной связью с электрической сетью и преобразователи частоты со звеном постоянного тока. К сожалению, такие недостатки, как малый диапазон регулирования частоты и сложность систем управления не позволили создать условия для широкого внедрения в промышленность ПЧ с непосредственной связью с сетью. Относительно второго типа ПЧ, то их строят на базе схем автономных инверторов тока или напряжения с регулированием частоты за счет изменения скорости подачи импульсов открывания, и управления уровнем напряжения путем ШИМ модуляции импульсов на базах транзисторов преобразователя.
Отличительной особенностью СИФУ автономных инверторов напряжения является то, что их управляющие импульсы не связаны с синхронизацией по фазным напряжениям сети. Это позволяет осуществлять открывание транзисторов преобразователя с помощью распределителей импульсов, построенных на базе схем цифрового интегрирования и дешифрации. Помимо этого в этой системе управления импульсами в качестве входных присутствуют два сигнала управления – задание на частоту и задание на уровень напряжения. Эти сигналы задания могут быть связаны друг с другом законом управления либо регулируются независимо.
Структурная схема СИФУ для ПЧ с автономным инвертором напряжения изображена на рис. 7 и включает следующие блоки: ГРИ – генератор распределителя импульсов; СИ – счетчик импульсов; ДРИ – дешифратор распределения импульсов; ГРС – генератор регулируемой скважности; УМ – устройство модуляции управляющих импульсов и БФИ – блок формирования импульсов. Силовая часть схемы в данном случае показана при питании от источника постоянного тока. Хотя в реальном преобразователе частоты первичная его часть обычно реализуется как неуправляемый выпрямитель. При моделировании звено постоянного тока умышленно не используется, дабы упростить результирующую систему.
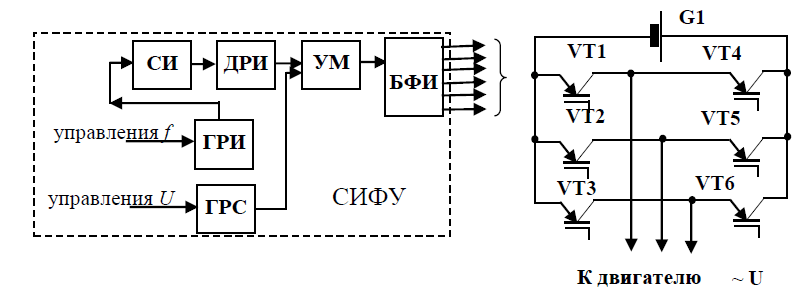
Рис. 7. Структурная схема СИФУ автономного инвертора напряжения
Карта распределения импульсов открывания транзисторов соответствует условию работы преобразователя, при которых, если бы он был ведом сетью. Пользуясь таблицей истинности, и картой распределения, проектируют ДРИ, на вход которого через счетчик СИ циклически подаются коды ГРИ. Это происходит путем изменения напряжения по входу ГРИ, который построен как преобразователь напряжение—частота. Генератор ГРС и устройство модуляции УМ сигналов частоты управления построены, так же как и в регуляторе напряжения с ШИМ. Блок формирования импульсов выполняет исключительно функцию согласования мощностей между системой управления и преобразователем.
Моделирование СИФУ автономного инвертора напряжения также выполнено программными средствами Multisim. Преобразователь нагружен на 3-фазную активно-индуктивную нагрузку. Его составляющие компоненты представлены на рис. 8 а, где 1 — генератор регулируемой скважности, 2 — преобразователь напряжение-частота, 3 — распределитель импульсов, включающий счетчик с ограничивающим сбросом в соответствии с таблицей распределения и дешифратором распределения импульсов, 4 — блок модуляции и распределения управления. Регулирование амплитуды формируемого напряжения и заданной частоты на выходе инвертора выполняется с помощью резисторов R1, R2.
Результат моделирования показан на рис. 8 б. Позиции 1 и 2 отражают условия, при которых инвертор работает с максимальной частотой и последующим ее снижением. Позиция 3 демонстрирует минимальную частоту работы и снижение амплитуды напряжения, которое достигается за счет ШИМ управления.
Подход к построению СИФУ для преобразователей постоянного тока существенно не отличается от схем регулирования переменного напряжения при фазосдвигающем и широтно-импульсном методах управления. Изменения касаются только включения силовых схем выпрямителей.
В результате проделанной работы следует отметить, что:
• актуальность использования преобразовательной техники не вызывает сомнения;
• СИФУ с фазным и ШИМ управлением имеют различную структуру, а СИФУ инверторных устройств фактически представляют собой гибридную схему двух предыдущих схем;
• современные программные продукты позволяют моделировать системы СИФУ различных типов с достаточной точностью;
• схемные решения СИФУ преобразователей могут отрабатываться на моделях Multisim на стадиях разработки, проектирования и отладки;
• к числу достоинств моделей следует отнести визуальную наглядность, полный комплект приборного обеспечения, возможность исследований, при которых фактически не возникают аварийные ситуации, что, на взгляд авторов, необходимо обязательно использовать в учебных целях.
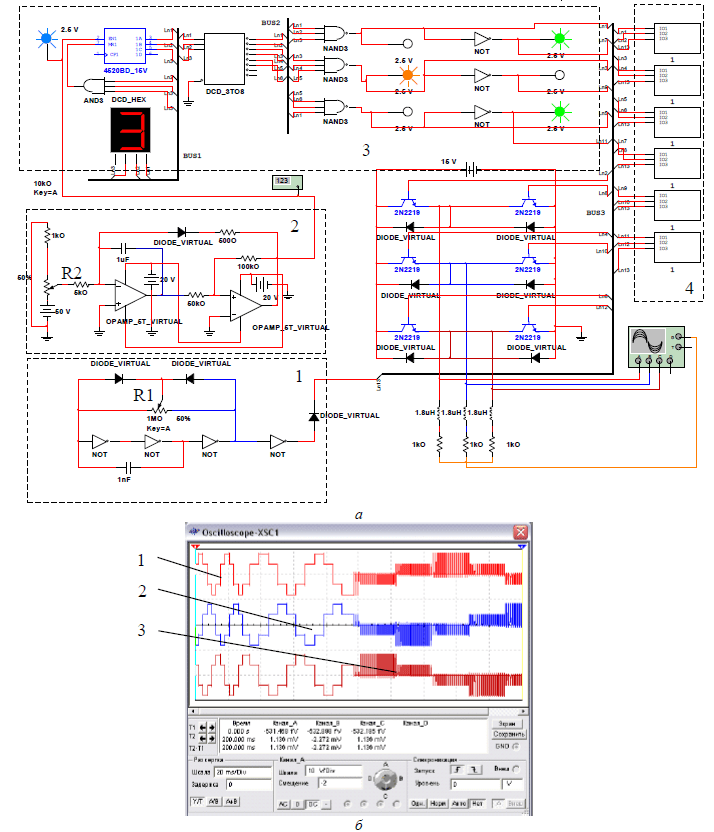
Рис. 8. Модель СИФУ автономного инвертора напряжения
Список использованной литературы
- 1. Руденко В.С. Основы преобразовательной техники: учеб. для вузов / Руденко В.С., Сенько В.И., Чиженко И.М. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1980. – 424 с.
- Полупроводниковые выпрямители/ под ред. Ф.И. Ковалева и Г.П. Мостковой – 2-е изд., перераб. и доп. – М.: Энергия, 1978. – 448 с.
- Казачковський М.М. Керовані випрямлячі. / М.М. Казачковський – Д.: НГА, 1999. – 228 с.
- Казачковський М.М. Автономні перетворювачі та перетворювачі частоти: Навч. посіб./М.М.Казачковський. – Д.: НГА, 2000. - 197 с.