
Содержание
- Введение
- 1. Исследования
- 1.1 Понятия асинхронного режима и электрического центра качаний
- 1.2 Теоретический обзор существующих способов определения ЭЦК
- Выводы
- Список источников
Введение
Нарушение устойчивости электроэнергетической системы представляет постоянную и серьезную угрозу. Поэтому представляется полезным заблаго-временно выявлять признаки изменения условий работы электроэнергетической системы в направлении ухудшения устойчивости
Одним из наиболее опасных последствий нарушения устойчивости является возникновения асинхронного режима, для недопущения его возникновения и предотвращения применяется автоматика ликвидации асинхронного режима (АЛАР). Для корректной и эффективной работы автоматики необходимо устанавливать её на опасных сечениях, строящихся по электрическим центрам качаний (ЭЦК).
Целью данной работы является оценка эффективности методов определения ЭЦК, выявления наиболее практичного из них и составлению доступной и понятной методики по определению ЭЦК.
Достижение поставленных целей достигается решением следующих задач:
- Обзор литературы по тематикам АР и ЭЦК;
- Обзор существующих способов определения ЭЦК в электрической сети при возникновении асинхронного хода в энергосистеме
- Оценка методов с точки зрения точности и простоты определения электрического центра качаний;
- Выявления наиболее подходящего метода для практических целей, например, для расчета мест установки АЛАР и расположения ЭЦК, и теоретических целей, например, обучения в учебных заведениях и местах повышения квалификации, целей.
1. Исследования
1.1 Понятия асинхронного режима и электрического центра качаний
Возникающие при нарушении устойчивости аварийные, в том числе асинхронные режимы представляет серьезную опасность для энергосистемы,так как могут привести к развитию аварии и обесточиванию ответственных по-требителей. Рассмотрим подробнее асинхронный режим.
Асинхронный режим (АР) – есть следствие нарушение статической или динамической устойчивости [1] которой может быть вызвано:
- перегрузкой транзитных связей мощностями сверх максимально допустимых по устойчивости величин;
- отказом выключателей или защит при КЗ в электросетях;
- отказом или недостаточной эффективностью ПА;
- несинхронным включением связей или генераторов;
- потерей возбуждения мощных генераторов;
- работой энергосистемы с недопустимо низким напряжением на генераторах и в основной сети;
- аварийным отключение большой мощности;
- отключением одного или нескольких загруженных сетевых элементов сечений основной сети;
- работой с недопустимо низкой частотой;
- сочетанием нескольких факторов [2].
Таким образом выделяют два вида АР, с потерей возбуждения на генераторе и без потери возбуждения, второй случай также называют асинхронным ходом. Рассмотрим подробнее режим работы при асинхронном ходе.
Физическая суть АР заключается в том, что движение роторов синхронных машин одной группы (отдельных генераторов, всех генераторов электростанций, энергосистем, синхронных двигателей) происходит с угловой скоростью, отличающейся от угловой скорости движения роторов синхронных машин другой группы (энергосистемы, объединенной энергосистемы).
АР характеризуется:
- Устойчивыми глубокими колебаниями напряжения, токов и мощностей;
- Изменением взаимного угла ЭДС генераторов хотя бы с одной из электростанций по отношению к ЭДС генераторов любой другой электростанции энергосистемы на угол, превышающий 360° град;
- Возникновением разности частот между частями синхронной зоны, вышед-шими из синхронизма, при сохранении электрической связи между ними;
- Возникновении дополнительных токов в замкнутых контурах ротора, вызы-вающих перегрев ротора;
- Возникновение уравнительных токов, сравнимых с токами КЗ;
- Падения напряжения в сети;
- Появлением точки ЭЦК, которая может перемещаться по системе и приво-дить к самоотключением групп энергопринимающих установок потребите-лей, оказавшихся вблизи ЭЦК, и отключением ответственных механизмов собственных нужд электростанций;
- Изменение направления перетока реактивной мощности [2].
Таким образом, возникающие процессы в асинхронном режиме несут опас-ность как для всей энергосистемы, так и для отдельных её частей. Поэтому для предотвращения развития аварий и обесточивания ответственных 16 потребителей в настоящее время широко применяется автоматика предот-вращения нарушения устойчивости, делительная автоматика и другие средства противоаварийной автоматики.
Для корректной работы делительной автоматики необходимо устанавливать её на опасных сечениях, образующихся при возникновении асинхронного режима. Данные сечения образуются совокупностью ЭЦК, расположенных на параллельных элементах системы.
Данная работа посвящена разработке оптимального способа определения электрического центра качания (ЭЦК), при возникновении асинхронного ре-жима (АР). Рассмотрим подробнее процессы происходящие в ЭС при воз-никновении АР, на примере одномашинной ЭС.
Будем рассматривать левую группу синхронных машин как электростан-цию, правую, как объединенную энергосистему. Связь между ними будем рассматривать в электрических расстояниях, например, в виде сопротивле-ний, в состав которых могут входить ВЛ, сопротивления трансформаторов, других элементов и, конечно, самих синхронных машин. Выберем на неко-тором электрическом расстоянии от электростанции (L1) точку, где нас будет интересовать напряжение. До электрической системы расстояние будет L2 (рис. 1).
В нормальном режиме движение роторов всех синхронных машин происхо-дит с одной и той же скоростью, которую называют синхронной скоростью. При этом допускается небольшое отклонение скорости отдельных синхрон-ных машин или их групп, но увеличение не переходящее в асинхронный ход и с последующим затуханием этого процесса. Такие явления называются синхронными качаниями [1].
Рисунок 1 – Модель рассматриваемой одномашинной энергосистемы
(анимация: 10 кадров, 5 циклов повторения, 52,6 килобайт)
Предположим, что электростанция передает в энергосистему определен-ную мощность. Эта мощность определяется:
где P – мощность передаваемая по линии, МВт;
E1 – модуль значения ЭДС станции, кВ;
E2 – модуль значения ЭДС системы, кВ;
Х – результирующее, эквивалентное сопротивление между электростанцией и энергосистемой;
δ – взаимный угол ЭДС станции и системы.
Эквивалентное сопротивление между электростанцией и энергосистемой, разбивается на два участка:
Где:
XL1 – реактивное сопротивлении участка L1, Ом;
XL2 – реактивное сопротивлении участка L2, Ом;
Векторная диаграмма рассматриваемой схемы изображена на рисунке 2.
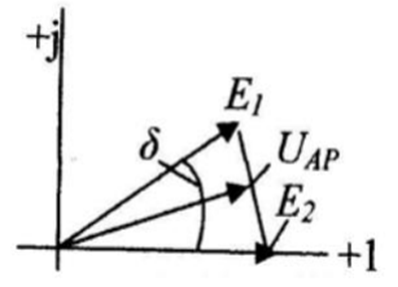
Рисунок 2 – Векторная диаграмма Одномашинной системы в нормальном режиме
Поскольку вектор ЭДС энергосистемы направлен по действительной оси, вектор ЭДС электростанции удобно представить с помощью показательной функции
С некоторой погрешностью можно определить ток, циркулирующий между электростанцией и энергосистемой:
Зная величину тока, согласно [1] величину напряжения в интересующем месте можно определить как:
Перемещая точку измерения напряжения, можно найти такую точку, где напряжение минимально. Такая точка называется точкой минимального напряжения (ТМН). Если говорить об электрических расстояниях, ТМН находится как раз в средине: XL1= XL2.
Далее перейдем от нормального режима к АР, в новых условиях угол будет постоянно меняться. Рассматривая изменение напряжения в точке ТМН для различных при различных значениях угла была получена векторная диаграмма напряжений приведённая на рисунке 3.
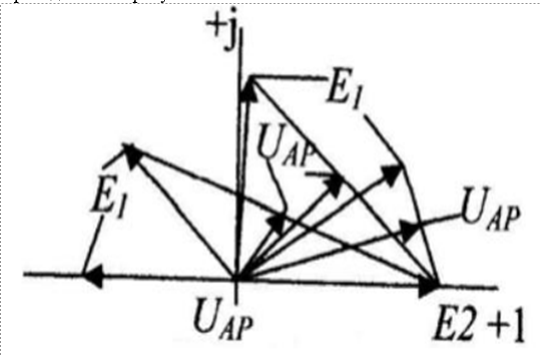
Рисунок 3 – Векторная диаграмма напряжений при различных значениях угла
Для каждого значения угла определена величина напряжения в центре качаний. Замечаем, что с увеличением угла δ напряжение в центре качаний уменьшается, при угле равном 180° оно становится равным нулю. Покажем изменение напряжение для точки ЭЦК и тока в сети при АР графически на рисунке 4.
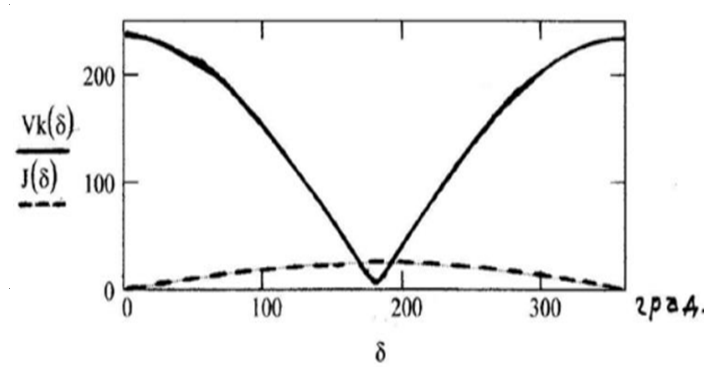
Рисунок 4 – График изменения напряжения и тока в сети при АР
Из приведенного графика видно, что напряжение в центре качаний достигает нуля при угле равном 180°, при этом же угле ток асинхронного хода достигает максимума, по величине он соизмерим с током короткого замыкания в этом же месте (центре качаний). Таким образом асинхронный режим является недопустимым, рассмотрим подробнее пути борьбы с АР.
Для борьбы с АР возможно выполнение следующих мероприятий:
- Снижение активной мощности генераторов, которые вышли из синхронизма и работают в асинхронном режиме;
- Форсирование тока возбуждения генераторов, что приводит к увеличению их ЭДС и, следовательно, к более жесткой привязке к энергосистеме, а также снижению колебаний напряжения [3];
- Средствами противоаварийной автоматики, которая может отключать ге-нераторы или нагрузку, а в случае необходимости производить деление энергосистемы на синхронно работающие части [2].
Успешная борьба с асинхронным режимом может привести к восстановлению нормального синхронного режима. Такое явление называется ресинхронизацией.
Рассматривая изменения угла движения ротора генератора при АР, видно, что угол периодически проходит через ноль (или через угол 360°). Именно в этот момент появляется возможность ресинхронизации. Однако, для осуществления успешной ресинхронизации необходимо, чтобы площадка уско-рения была меньше площадки торможения. В этих условиях площадка ускорения исчисляется от угла (точнее от n360°), что усложняет процесс ресинхронизации. Поэтому для облегчения ресинхронизации выполняют снижение мощности турбины и форсирование тока возбуждения генератора.
1.2 Теоретический обзор существующих способов определения ЭЦК
Как уже отмечалось ранее для оценки состояния текущего режима и проведения быстрых и эффективных мер по ликвидации аварийных режимов, а также при решении задач проектирования и модернизации противоаварийной автоматики необходимо знать о слабых участках сети (слабых свя-зях), входящих в состав опасных сечений.
Одним из первых шагом в решении этих задач, является выявления этих сла-бых участков и точек ЭЦК, входящих в их состав. В данной работе рассмот-рено 5 способов определения места ЭЦК, т.е. электрической и географиче-ской удалённости ЭЦК от одной из рассматриваемых шин.
Рассматриваемые способы определение ЭЦК:
- Метод ТМН;
- Метод определения ЭЦК по режимным параметрам (тока и напряжения) в АР;
В методике определения ЭЦК по методу ТМН признаком наличия ЭЦК на линии в АР является наличие точки минимального напряжения (ТМН) на данной линии в нормальном режиме.
Важным отличием метода выявления слабых линий на основе анализа ТМН является возможность выявления слабых связей и потенциально опасных се-чений задолго до момента наступления потери устойчивости, что позволяет использовать признак наличия ТМН для мониторинга и управления энерго-системой в режиме реального времени.
Показано, что для участка линии от узла с напряжением U0 до узла с напряжением U=U×e j×α распределение напряжения рассматриваемого участка:

где x – реактивное сопротивлении рассматриваемого участка, Ом;
U0 – полное напряжение в начале участка, кВ;
U – полное напряжение в конце участка, кВ.
Схема рассматриваемого участка представлена на рис.5.
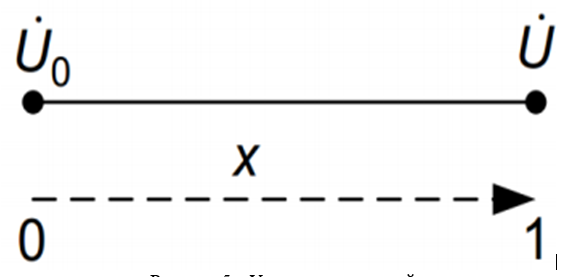
Рисунок 5 – Участок однородной линии
При этом величина квадрата модуля напряжения будет иметь минимум в точке
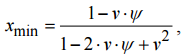
Где: Xmin – электрическая удалённость точки ТМН, Ом;
А величина напряжения в ТМН:
Где νx2 – значение модуля квадрата напряжение в точке ТМН. Условие попадания ТМН на рассматриваемый участок: xmin ∈ [0;1].
Рассматривая ТМН с нулевым значением напряжения, т.е. переходя к ЭЦК и принимая условия угол равен 180° при произвольной величине ν положение ТМН будет определяться по упрощённой формуле:
Таким образом, при провороте векторов U0, U при асинхронном ходе в момент, когда угол между напряжениями участка достигает 180°, ТМН совмещается с точкой электрического центра качаний.
При меньшем угле разворота векторов напряжений наличие ТМН может рассматриваться в качестве указателя на линию с ЭЦК. Диаграмма распре-деления напряжения вдоль ЛЭП представлена на рисунке 6.
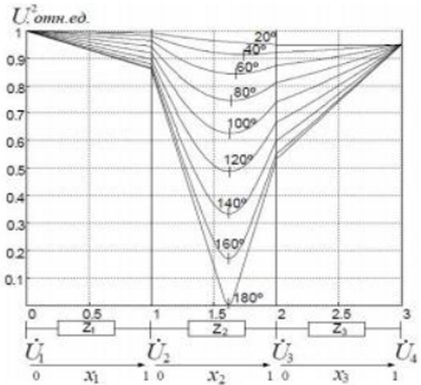
Рисунок 6 – Диаграмма распределения напряжения вдоль ЛЭП
Из диаграммы видно, что величина квадрата напряжения на участках Z1 и Z3 изменяется практически линейно, а на участке Z2, начиная с некоторой величины угла разворота ЭДС, обладает характерной особенностью – наличием минимума квадрата модуля напряжения.
Положение ТМН определяется структурой и параметрами схемы. ТМН выявляется уже при относительно небольших углах разворота и задолго до достижения напряжения абсолютного минимума напряжения в точке ЭЦК [5]
Географическая удаленность ТМН определяется по следующей формуле:
Географическая удаленность ЭЦК в свою очередь, определяется по следующей формуле:
Возникает вопрос о правомерности применения данного метода на линиях с промежуточной нагрузкой, смежных участках однородных и неоднородных линий.
Так при смежных однородных линиях, определение места ЭЦК может вестись как для каждого участка смежной линии, так и для всего участка однородной линии в целом, что является более целесообразно и подтверждено проделанными в работе расчетами.
Если же рассматриваются смежные неоднородные линии, пример линии показан на рисунке 7, то согласно [7], определение места ЭЦК необходимо вести отдельно для каждого из смежных участков, т.е. последовательно рассмотреть участки Z1 и Z2.
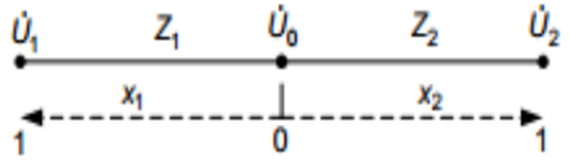
Рисунок 7 – Смежный участок неоднородной линии
Наличие же промежуточной нагрузки не влияет непосредственно на методи-ку определения ЭЦК на смежных участках линии, но приводит к смещению места расположения ЭЦК.
При возникновении АР в ЭС, устойчивые наблюдаются глубокие колебани-ями напряжения, токов и мощностей. Данный метод направлен на определе-ния ЭЦК в АР исходя из токов и напряжений. Электрическую удаленность, т.е. сопротивление линии при угле , ЭЦК от одной из шин согласно [7] находится по формуле:
Где ХЭЦК – – электрическая удаленность ЭЦК, Ом;
U – фазное значение напряжения на шине линии с ЭЦК, кВ;
Определив электрическую удаленность ЭЦК от шины, необходимо опреде-лить её географическую удаленность, т.е. определить на каком километре линии находится ЭЦК. Для этого необходимо определить сопротивление ЛЭП в нормальном режиме, и составить соотношение. Сопротивление линии в нормальном режиме определяется по формуле:

Географическая удаленность ЭЦК определяется по формуле:
Где lЭЦК – географическая удаленность места ЭЦК от шины, км.
Выводы
Вывод. На момент написания данного автореферата, магистерская работа не была закончена и в будущем предусматривает расчет моделирования и анализа возникновения электричсекого центра качаний. При расчетах планируется использовать программновычислительный комплекс MathCAD, который позволяет в режиме реального времени оценивать влияние качаний на работу энергосистемы в целом и отдельных элементов в частности
Список источников
- Профилактические испытания изоляции оборудования высокого напряжения, Бажанов С.А., М., ЭНЕРГИЯ, Москва 1968 г.,72 с.
- Обслуживание электрических подстанций/ О.В. Белецкий, С.И. Лезнов, А.А Филатов. – М.: Энергоатомиздат, 1985, – 416 с.
- Обслуживание генераторов, Чернев К.К. – М.: Энергоатомиздат, 1989 г., 592 с.
- Электрические системы и сети, Идельчик В.И. Учебник. – М.: Высшая школа, 2003. – 463 с.
- Электрические машины, Кацман М.М. Учебник. – М.: Высшая школа, 2003. – 463 с.
- Рожкова Л.Д., Козулин В.С., Электрооборудование станций и подстанций 3–е изд., перераб. и доп. Учебник для техникумов. М.: Энергоатомиздат, 1987. – 648 с.
- Неклепаев Б.Н. Электрическая часть электростанций и подстанций. Учебник для вузов – 2–е изд. М. Энергоатомиздат, 1986. – 640 с.
- Сайт компании
DIMRUS
Измерение частичных разрядов в изоляции статоров высоковольтных электрических машин [Электронный ресурс] – Режим доступа: Компания DIMRUS – (дата обращения: 15.10.18). - Сайт компании
DGM KZ
Краткая информация о частичных разрядах (ЧР) и их измерении [Электронный ресурс] – Режим доступа: Компания DGM KZ – (дата обращения: 17.10.18). - Выдержка из книги Бажанов С.А. Профилактические испытания изоляции оборудования высокого напряжения [Электронный ресурс] – Режим доступа: Большая энциклопедия нефти и газа – (дата обращения: 14.11.18).
- Выдержка из книги Бажанов С.А. Профилактические испытания изоляции оборудования высокого напряжения [Электронный ресурс] – Режим доступа: Большая энциклопедия нефти и газа – (дата обращения: 10.12.18).
- Сушка изоляции генераторов [Электронный ресурс] – Режим доступа: Электронный ресурс KazEDU – (дата обращения: 16.12.18).