Аннотация
Филипчик. Ю.Д. При коротких замыканиях (КЗ) и других аварийных режимах, связанных со значительным понижением напряжения, АРВ быстро и значительно увеличивает (форсирует) ток возбуждения и тем самым изменяет ЭДС и напряжение на шинах генератора. В режимах, связанных с повышением напряжения на шинах электри-ческой станции, АРВ быстро снижает ЭДС генератора, выполняя тем самым про-цесс расфорсировки. Применение автоматического регулирования возбуждения синхронной машины также позволяет увеличить предельное время отключения короткого замыкания.
Современная электроэнергетическая система представляет собой сложную структуру с постоянно изменяющимися параметрами режима (напряжение, мощность потребления и генерации в узлах схемы сети). Отклонение напряжения у потребителей относительно номинального значения (в сторону увеличения или уменьшения) приводит к ухудшению условий работы или сокращению срока службы оборудования, снижению производительности технологических механизмов, браку продукции и т. д. В связи с этим необходимость регулирования напряжения в энергосистеме определяется как энергосисте-мой, так и потребителями. Также системные требования к уровню напряжения в сетях высшего напряжения диктуются и устойчивостью энергосистем [1].
Устройства регулирования напряжения на выводах генераторов электрических станций должны поддерживать заданный уровень напряжения и требуемое рас-пределение реактивной мощности между параллельно работающими синхронными машинами. Различают регулятор напряжения и регулятор возбуждения. Регу-лятор напряжения представляет собой устройство, предназначенное для поддержания напряжения на заданном уровне. В случаях, когда дополнительно необходимо обеспечить регулирование возбуждения для повышения устойчивости параллельной работы энергосистем, повышения четкости действия релейной защиты, обеспечения самоза-пуска двигателей и т. п., применяются автоматические регуляторы возбуждения (АРВ) [2].
При коротких замыканиях (КЗ) и других аварийных режимах, связанных со значительным понижением напряжения, АРВ быстро и значительно увеличивает (форсирует) ток возбуждения и тем самым изменяет ЭДС и напряжение на шинах генератора. В режимах, связанных с повышением напряжения на шинах электрической станции, АРВ быстро снижает ЭДС генератора, выполняя тем самым процесс расфорсировки. Применение автоматического регулирования возбуждения синхронной машины также позволяет увеличить предельное время отключения короткого замыкания [3].
В качестве параметров, по которым выполняется регулирование, используется отклонение напряжения, тока, активной и реактивной мощности, угла δ сдвига вектора электродвижущей силы генератора Е относительно вектора напряжения Uбу балансирующего узла. Повышение эффективности регулирования возбуждения может быть достигнуто за счет ввода в регулирующую функцию АРВ сигналов, пропорциональных первой и второй производным некоторых параметров. Это позволяет добиться повышения предела выдавае-мой мощности по статической и динамической устойчивости, а также демпфирования колебаний в переходных процессах [4]. В системах АРВ совместно или же вместо угла δ вводится сигнал по от-клонению частоты – скольжению Δf=s=dδ/dt или ускорению α=dΔf/dt=ds/dt=d2δ/dt2.
В этих случаях к системе АРВ предъявляют следующие требования [2]:
- наличие высокого коэффициента усиления системы АРВ в разомкнутом состоянии (в пределах до KU = 50 ед. возб./ед. ст. напр.);
- регулирование возбуждения должно выполняться не только в функции угла δ или других параметров, адекватных углу, но и в функции напряжения генератора;
- использование при высоком коэффициенте усиления всех средств стабилизации, включая обратные связи.
Для улучшения качества переходных процессов в АРВ необходимо выполнять коррекцию сигнала по возмущению, а также воздействие по производной регулируемых величин. Один из возможных алгоритмов управления током возбуждения в зависимости от изменения скольжения и ускорения ротора генератора представлен на рис. 1 [5]. Суть способа поясним с использованием угловых характеристик активной мощности генератора.

Рисунок 1 – Угловые характеристики синхронного генератора
В исходном режиме (точка 1) при отсутствии КЗ механическая мощность турбины равна электрической мощности генератора. В момент короткого замыкания суммарное сопротивление схемы сети уменьшается и генератор переходит с угловой характеристики I на угловую характеристику II в точку 2 и под действием механического момента турбины начинает ускоряться. После некоторого запаздывания, определяющегося участком 2–3, срабатывает форсировка возбуждения, и ток возбуждения начинает увеличиваться, что приво-дит к росту электрической мощности (учас- ток 3–4). При угле ?отк устраняется короткое замыкание, и генератор переходит на послеаварийную характеристику III (линия 4–6). Энергия при ускорении ротора генератора равна площадке 1–2–3–4–5–1. Участок 6–7 соответ-ствует времени нарастания тока возбуждения до максимального (потолочного) значения. В точке 8 происходит отключение форсировки возбуждения, и генератор переходит на послеаварийную характеристику. Нужно отметить, что время снятия форсировки возбуждения функционально зависит от интеграла избыточного мо-мента на валу машины и выполняется раньше, чем скольжение ротора генератора достигнет нулевого значения [6, 7]. Энергия при торможении ротора генератора равна площадке 5–6–7–8–9–10–5.
При прохождении скольжения ротора генератора через нуль (точка 9) происходит включение расфорсировки возбуждения. Это приводит к уменьшению отри-цательной площадки торможения, которая во втором цикле качаний будет равна 9–10–11–9. Когда скольжение ротора генератора достигнет минимального значения (точка 11), происходит отключение расфорсировки возбуждения, а форсировка включается при скольжении, равном 0 (точка 12). При применении расфорсировки возбуждения площадка отрицательного ускорения (площадка 11–12–13–1–5–11) значительно сокращается, что приводит к уменьшению размаха колебаний и скорейшему успокоению синхронной машины.
На примере схемы энергорайона, представленной на рис. 2, для оценки динамической устойчивости по промышленной программе на ЭВМ, выполнены расчеты переходных электромеханических процессов. В качестве возмущения было условно принято трехфазное короткое замыкание на шинах 110 кВ электрической станции, содержащей один генератор. Для наглядности исходные данные по нагрузкам в узлах, сопротивлениям трансформаторов и линий электропередачи нанесены на схему. Исходные данные по синхронному генератору и параметрам его системы возбуждения приведены в табл. 1–3.
Таблица 1 – Исходные данные по синхронному генератору станции
| Pnom, МВт | Unom, кВ | cosφ | Mj, МВт×с | Xd', Ом | Xd, Ом | Xq, Ом | Xd", Ом | Td0, с |
| 70 | 6,3 | 0,85 | 436,5 | 0,149 | 0,566 | 0,566 | 0,101 | 4,6 |
Таблица 2 – Исходные данные по возбудителю и регулятору возбуждения синхронного генератора станции
| Тип системы | T | UРВ+ | Ku | Kальфа | TРВ | ТВ | Eqe | KIf |
| Электромашинная с возбудителем постоянного тока | 0,04 | 2 | 7 | 10 | 0,04 | 0,04 | 2 | 10 |
Таблица 3 – Исходные данные по уставкам форсировки
| Uвф | Uсф | Uв расф | Uс расф | Kф | Kрасф | Tв ф | Tв расф | T1 | T2 |
| 0,85 | 0,95 | 1,15 | 1,05 | 4,00 | −4,00 | 0,04 | 0,04 | 0,01 | 0,01 |
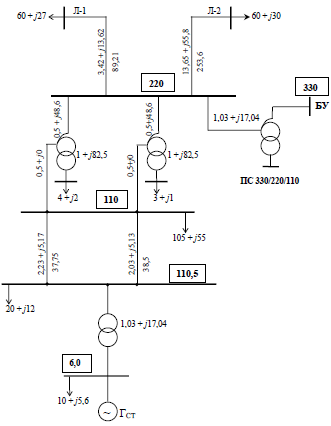
Рисунок 2 – Диспетчерская схема для исследования динамической устойчивости синхронного генератора электростанции
В соответствии с табл. 2 и 3 приведем описание параметров регулятора возбу-ждения (РВ) и форсировки возбуждения: TРВ – постоянная времени РВ, с; UРВ+ – ограничения величины входного сигнала РВ, о. е.; Ku – коэффициент регулирования по отклонению напряжения, ед. ном. возб./ед. напр.; Кальфа – коэффициент, позволяющий учесть изменение уставки по напряжению при отклонении частоты в сети, о. е.; ТВ – постоянная времени возбудителя, с; Eqe – максимальное и минимальное значение ЭДС синхронного генератора, о. е.; KIf – коэффициент регулиро-вания по отклонению тока ротора, ед. ном. возб./ед. тока рот.; Uвф, Uсф – напряжение ввода и снятия форсировки возбуждения, о. е.; Uв расф, Uс расф – то же расфорсировки возбуждения, о. е.; Kф, Kрасф – кратность форсировки и расфорсировки возбуждения, о. е.; Tв ф – постоянная времени возбудителя при форсировке возбуждения, о. е.; Tв расф – то же при расфорсировке возбуждения, о. е.; T1 – задержка времени при вводе форсировки и расфорсировки, с; T2 – то же при снятии форсировки и расфорсировки, с.
На рис. 3 и 4 показаны временные зависимости изменения актив- ной мощности и угла δ при отсутствии (зависимость 1) и наличии (зависимость 2) АРВ у исследуемого генератора.

Рисунок 3 – Зависимости изменения угла δ синхронного генератора от времени
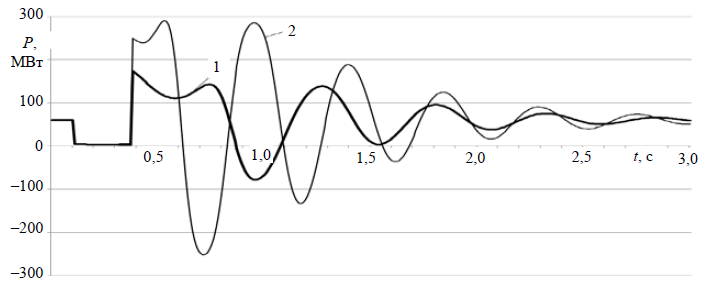
Рисунок 4 – Зависимости изменения активной мощности синхронного генератора от времени
Как видно из результатов расчета, применение автоматического регулятора возбуждения приводит к уменьшению первоначального вылета угла δ, а следовательно, и к повышению динамической устойчивости машины. В то же время увеличивается размах колебаний активной мощности в первых циклах качаний, что может отрицательно сказаться на работе оборудования, вплоть до нарушения динамической устойчивости генераторов электростанции и прекращению параллельной работы с энергосистемой.
В подтверждение теоретических положений, приведенных на рис. 1, выполнены расчеты, результаты которых отражены на рис. 5 и 6. Зависимость 1 соответствует случаю управления форсировкой и расфорсировкой возбуждения в соответствии с заданными в табл. 3 уставками, а зависимость 2 – регулированию тока возбуждения по описанному выше алгоритму. При этом на изменение тока возбуждения в обоих случаях накладываются ограничения по поддержанию напряжения на шинах генератора в требуемых границах.
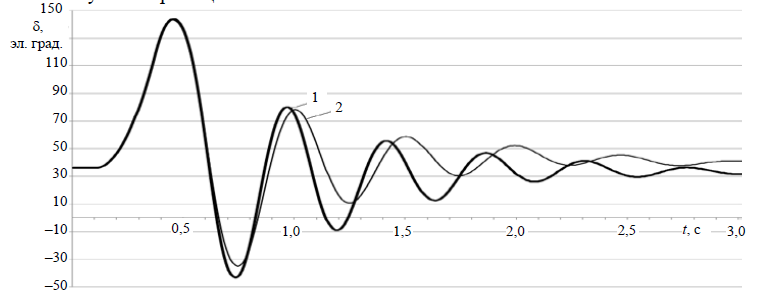
Рисунок 5 – Зависимости изменения угла δ при различных способах регулирования тока возбуждения
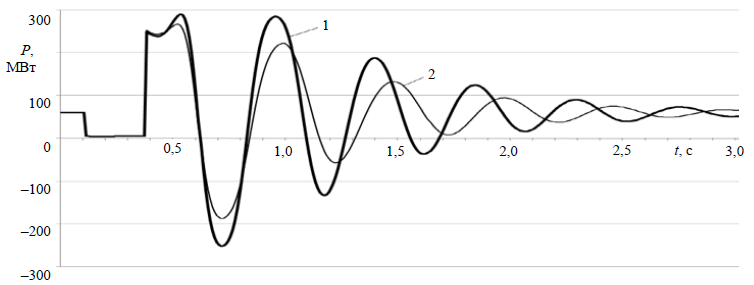
Рисунок 6 – Зависимости изменения активной мощности синхронного генератора при различных способах регулирования тока возбуждения
При управлении возбуждением синхронного генератора для повышения динамической устойчивости одним из наиболее распространенных показателей качест-ва переходного процесса является минимум интегрального среднеквадратичного отклонения угла δ [8]:
где δ2⚹ – отклонение угла ротора генератора относительно исходного. Дадим количественную оценку переходным процессам, представленным на рис. 5. Для случая управления током возбуждения только по отклонению напряжения на шинах генератора Пδ1=72,05 о. е., а при управлении согласно рассмотренному алгоритму Пδ2= 66,4 о. е.
Полученные результаты подтверждают эффективность предложенного способа управления возбуждением синхронного генератора.
ВЫВОДЫ
Применение автоматического регулирования возбуждения повышает динамическую устойчивость за счет уменьшения первоначального вылета угла δ. В то же время увеличивается размах колебаний активной мощности в первых циклах качаний, что может отрицательно повлиять на дальней- шее протекание переходного процесса. Регулирование тока возбуждения по предложенному алгоритму в зави- симости от изменения скольжения и ускорения ротора генератора позволяет улучшить качество переходных процессов за счет снижения размаха колебаний как активной мощности, так и угла δ.
Список использованной литературы
1. Беркович, М. А. Основы автоматики энергосистем / М. А. Беркович, А. Н. Комаров, В. А. Семенов. – М.: Энегоиздат, 1981. – 432 с.
2. Павлов, Г. М. Автоматики энергосистем / Г. М. Павлов, Г. В. Меркурьев. – СПб.: Издание Центра подготовки РАО ЕЭС России
, 2001. – 388 с.
3. Калентионок, Е. В. Устойчивость электроэнергетических систем / Е. В. Калентионок. – Минск: Техноперспектива, 2008. – 375 с.
4. Баркан, Я. Д. Автоматизация энергосистем: учеб. пособие / Я. Д. Баркан, Л. А. Орехов. – М.: Высш. шк., 1981. – 271 с.
5. Устройство для регулирования возбуждения синхронной машины: пат. 13305 Респ. Беларусь. МПК (2009) Н 02 Р 9/10, Н 02 Р 9/14 / Е. В. Калентионок, Ю. Д. Филипчик; заявитель БНТУ. – № а 20071249; заявл. 16.10.07; опубл. 30.06.10 // Афицыйны бюл. / Нац. Цэнтр iнтэлектуал. уласнасцi. – 2010.
6. Устройство для форсировки возбуждения синхронных машин: а. с. 434555 СССР МКИ Н02 р 9/10 / Д. В. Никитин, В. А. Строев, В. А. Штробель, И. А. Васильев (Московский ордена Ленина энергетический институт).
7. Симеонова, К. Ж. Вопросы выбора параметров АРВ в сложных электроэнергетических системах / К. Ж. Симеонова, В. А. Строев // Энергетика и транспорт… (Изв. АН СССР). – 1987. – № 5. – С. 61–71.
8. Веников, В. А. Теория оптимального управления электрическими системами и задачи повышения их устойчивости / В. А. Веников, М. Г. Портной // Электричество. – 1974. – № 3. – С. 9–15.