Аннотация
О.Е. Новикова, Д.П. Свиридов, Е.А. Бондаренко, Д.В. Заец, Д.Н. Мирошник. Эффективность применения альтернативных источников энергии. В работе разработана система отслеживания угла поворота и его последующего преобразования в угол поворота шагового двигателя. Заданием системы являются показания акселерометра, преобразованные в угол поворота.
Шаговые двигатели, получившие свое развитие в начале 20 века, имеют высокую точность и являются одним из лучших вариантов для автоматизации систем, не требующих высокой динамики. Преимуществом шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Наиболее важной особенностью ШД является то, что на каждый импульс управления ротор поворачивается на фиксированный угол, значение которого в градусах называется шагом.
На кафедре «Электропривод и автоматизация промышленных установок» разработан стенд для отслеживания угла поворота акселерометра для задач стабилизации объекта управления. Его принципиальная схема состоит из отладочной платы STM32F4Discovery, драйвера шагового двигателя Dual Step Motor sheild и шагового двигателя M42SP 6TG (рисунок 1) [1-4].
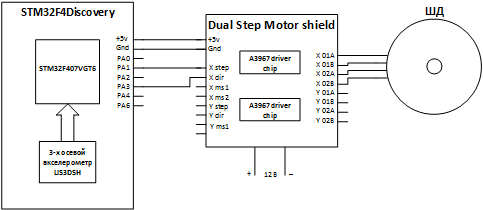
Рисунок 1 – Принципиальная схема устройства
Плата STM32F4Discover оснащена LIS3DSH [1], ST MEMS датчиком движения, 3-осевым акселерометром с цифровым выходом (рисунок 2). Принцип работы акселерометра основан на измерении смещения инерционной массы относительно корпуса и преобразовании его в пропорциональный электрический сигнал. Акселерометр – устройство, которое измеряет проекцию кажущегося ускорения или определяет угол наклона устройства относительно поверхности Земли.

Рисунок 2 – Общий вид платы STM32F4; в красном круге – 3-осевой акселерометр
Драйвер (рисунок 3) имеет 2 независимых канала, и может управлять сразу двумя шаговыми двигателями. Он служит для формирования необходимых временных последовательностей сигналов и обеспечения необходимого тока в обмотках. С его помощью можно осуществлять полношаговый, полушаговый или микрошаговый режимы.

Рисунок 3 – Общий вид драйвера Dual step motor driver shield
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. За счет меньшего угла шага под управлением контроллера достигается высшая точность при позиционировании. Также уменьшаются вибрации, реализуется практически бесшумная работа (и при очень низких частотах вращения), устраняется явление резонанса.
Характеристики драйвера:
- напряжение питания логики 3,3 или 5 В;
- напряжение питания силовой цепи 4,7-30 В;
- максимальный ток силовой цепи 750 мА;
- управлять драйвером можно как через пины, так и через протокол связи UART.
Для управления одним драйвером (рисунок 4) необходимо всего 4 пина: Step, Dir, MS1 и MS2.
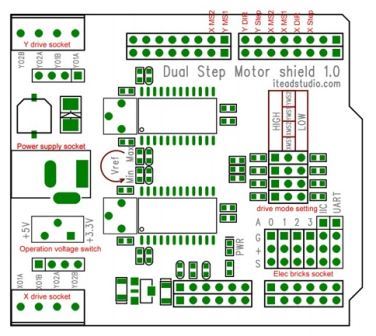
Рисунок 4 – Схема драйвера Dual step motor driver shield
Step – делает один шаг двигателя;
Dir – задает направление движения;
MS1 и MS2 задают конфигурацию микро шагового режима.
Микро шаговый режим можно настроить как с помочью джамперов непосредственно на плате, так и с помощью пинов (режим устанавливается отдельно для каждого драйвера, см. табл.1).
Таблица 1 – Переключение режимов работы драйвера
| MS1 | 2 | 3 |
| 4 | 5 | 6 |
| awd | awd | awd |
| awd | awd | awd |
| H | H | awd |
Имеется подстроечный резистор Vref для настройки тока шагового двигателя (защита драйвера и двигателя от перегрева).
Система управления (рис.5) начинает работу при поступлении данных от акселерометра, которые предварительно пересчитываются в угол поворота (блок ANGLE). После сравнения с показаниями счетчика (порт counter_value), передаются через регулятор положения (CONTROLLER) на порты входа счетчика (COUNTER) up1down0 и move. В свою очередь вход up1down0 синхронизирует работу акселерометра и счетчика, с учетом коэффициентов, через управляемый ключ происходит инкремент или декремент счетчика. Также COUNTER задает направление движения двигателя (step motor direction). Блок min выполняет роль ограничителя счетчика по переполнению. Вход move регистрирует наличие движения акселерометра и контролирует количество необходимых импульсов, которые поступают на шаговый двигатель (step motor pulses). В роли формирователя импульсов выступает Pulse Generator.
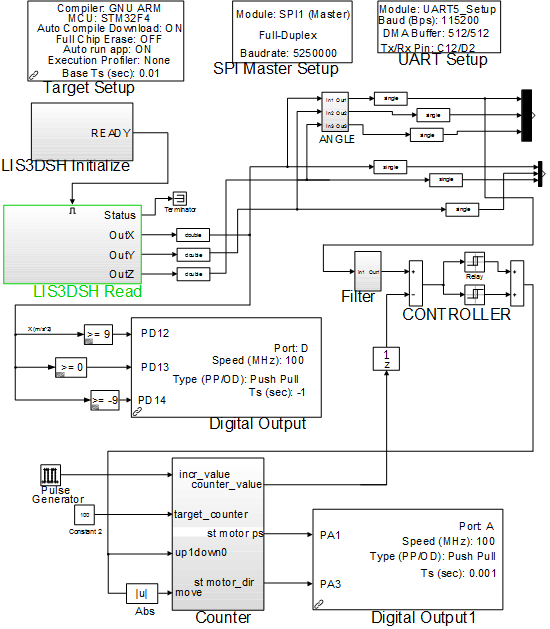
Рисунок 5 – Модель реализации системы управления
Алгоритм управления программируется в отладочную плату STM32F4Discovery, к которой подключен драйвер шагового двигателя Dual step motor driver shield.
При изменении положения в заданной оси плата использует MEMS датчик движения, чтобы мигать светодиодами в соответствии с направлением и скоростью движения, то есть таким образом сигнализирует о реакции акселерометра на угловое перемещение (поворот).
После данный сигнал передается на ПК. Дальнейшее преобразование угла поворота акселерометра в угол поворота шагового двигателя осуществляется программно в среде моделирования Simulink MATLAB.
Данный алгоритм может быть применен в любых объектах требующих стабилизацию положения, например стедикам. Назначение стедикама – обеспечение плавного перемещения видеокамеры при динамической видеосъемке. В этом устройстве все угловые перемещения сводятся к минимуму настолько, что у зрителя при просмотре готовой видеоработы создается ощущение полета.
Недостатком данного алгоритма является недостаточная точность отработки, что требует дальнейших исследований.

Рисунок 6 – Общий вид системы управления «акселерометр – шаговый двигатель»
Выводы
- При изменении положения платы, шаговый двигатель изменяет свое положение ротора.
- Данная система управления планируется для использования в системе стабилизации видеокамеры.
Перечень ссылок
- User manual. STM32F4DISCOVERY [Электронный ресурс]. Режим доступа: http://www.st.com/....
- Overview. Dual step motor driver shield [Электронный ресурс]. Режим доступа: http://khnu.km.ua/....
- МЭМС-датчики движения от STMicroelectronics: акселерометры и гироскопы [Электронный ресурс]. Режим доступа: http://www.russianelectronics....
- ST Microelectronics portal [Электронный ресурс]. Режим доступа: http://www2.st.com/....