Аннотация
Zerong Wang, Cunliang Jia, Enpeng Liu. Цифровая система импульсно-фазового управления трехфазным регулятором напряжения на основе однокристалльного микроконтроллера. Предлагается метод реализации цифровой системы импульсно-фазового управления тиристорным регулятором напряжения для трехфазной цепи на базе однокристального контроллера. В программном обеспечении были разработаны решения об автоматическом определении последовательности фаз электроэнергии. В основном проанализирован принцип изменения угла управления. Проанализирована взаимосвязь распределения импульсов. Программа цифровой системы импульсно-фазового управления была разработана в среде MPLAB. И ее корректность была показана с помощью имитационной модели в среде PROTEUS. Результаты моделирования показывают, что система импульсно-фазового управления обеспечивает хорошую производительность. Эта система включает контроллер и усилитель, что позволяет уменьшить количество компонентов, снизить затраты и быть более интегрированной, более точной.
Ключевые слова
Однокристалльный; цифровой триггер; тиристор; распределение импульсов.
I. ВВЕДЕНИЕ
Пуск асинхронного двигателя и энергосбережение – это актуальные темы в области управления двигателем. Тиристорные регуляторы широко используются при изучении данных вопросов. Точность управления, реальное время, симметрия, стабильность в основном определяются системой импульсно-фазового управления в системе управления переключением тока. Ранее имелись такие недостатки как сложность аппаратной схемы, недостаточная симметрия формы сигнала, сложность отладки, быстрое старение, слабая помехоустойчивость в схеме синхронизации и схеме формирования угла управления, которые получали при управлении амплитудой напряжения и синхронизацией с переменным напряжением (также известное как вертикальное управление). С цифровыми системами управления в широком диапазоне электропередач, новой тенденцией стала цифровая система импульсно-фазового управления на основе микроконтроллера. В этой работе создана цифровая система импульсно-фазового управления тиристорами с использованием микроконтроллера MICCHOCHIP PIC16F877A в качестве ядра управления. Эта система использует преимущества мощных функций микроконтроллера, быстродействие и удобные расширения. Кроме того, на практике доказано, что система может обеспечить хорошую симметрию, стабильность и высокоточное управление импульсами для достижения удовлетворительных результатов.
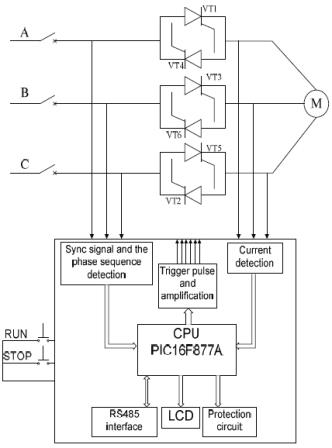
Рисунок 1 – Схема тиристорного регулятора напряжения
II. СХЕМА СИСТЕМЫ И ПРИНЦИП РЕГУЛЯТОРА НАПРЯЖЕНИЯ
Схема системы импульсно-фазового управления трехфазным тиристорным регулятором напряжения показана на рис.1. Она включает в себя блок определения синхросигнала, блок обнаружения тока нагрузки, схему управления тиристорами, схему защиты, часть отображения состояния работы и последовательный интерфейс RS485. Процесс управления этой системой выполняется на основе микроконтроллера MICCHOCHIPP PIC16F877A.
Как показано на рис.1, три встречно-параллельных тиристорных модуля VT1-VT4, VT3-VT6, VT5-VT2 представляют собой трехфазную схему регулятора переменного напряжения. Его выход соединен с трехфазными обмотками статора двигателя М. Схема синхронизации основной цепи может поддерживать точное смещение фаз трехфазного сигнала и используется для определения естественной точки коммутации тиристора и состояния работы (с указанием 0,1). В процессе запуска двигателя общая информация системы управления микроконтроллером PIC16F877A опирается на трехфазные сигналы прямоугольной формы для определения кода состояния включения (с указанием 0,1). Затем определяется порядок фаз и порядок запуска тиристоров. В процессе запуска двигателя, микроконтроллер PIC16F877A обрабатывает всю системную информацию и, на основе трехфазных сигналов прямоугольной формы, определяет состояние тиристоров (с указанием 0,1), затем определяет порядок чередования фаз и порядок импульсов управления тиристорами. После преобразует угол управления фазой α в соответствующее время t, которое связано с ожидаемым значением выходного напряжения Uk. Приняв точки естественной коммутации за стартовое время таймера, выдаются импульсы управления тиристорами после времени задержки, тиристоры VT1 ~ VT6 включаются каждые 60° электрических градусов в процессе работы. Схема управления усиливает и вырабатывает сигналы требуемой амплитуды и ширины, управляя выходным напряжением Uk, определяемым в соответствии с заданным временем таймера. Полный процесс импульсно-фазового управления описан выше.
Исходя из требований к работе, изменение угла отпирания тиристора α может улучшить работу двигателя, чтобы удовлетворять производственным потребностям. Например, в режиме плавного пуска двигателя в соответствии с установленными правилами, такими как линейное нарастание напряжения, плавный пуск с помощью постоянного тока, линейное нарастание напряжения с постоянным управлением током и другие законы, запуск двигателя лучше, а потери мощности при пуске меньше. В режиме энергосбережения, с помощью автоматического определения тока нагрузки, плавный пуск автоматически настраивает напряжение статора двигателя в соответствии с его номинальными параметрами.
III. СИНХРОНИЗАЦИОННЫЙ СИГНАЛ И АДАПТИВНАЯ ФАЗОВАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ
Необходимые сигналы были получены после того, как сигналы мощности проходят через трехфазный силовой трансформатор переменного тока, а затем через RC-фильтр.
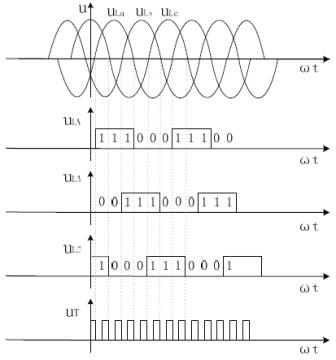
Рисунок 2 – Трехфазный синхросигнал и взаимосвязь между фазами
Таблица 1 – Соответствие между фазой напряжения питания, тиристором и кодом статуса
| Фаза питающего напряжения | Тиристор | Код статуса | ||
| ULa | ULb | ULc | ||
| Фаза A | VT1 | 1 | 0 | 1 |
| VT4 | 0 | 1 | 0 | |
| Фаза B | VT3 | 1 | 1 | 0 |
| VT6 | 0 | 0 | 1 | |
| Фаза C | VT5 | 0 | 1 | 1 |
| VT2 | 1 | 0 | 0 | |
Как показано на рис.2, LM339 Op amp выводит прямоугольную волну длиной 180 градусов каждый раз после нулевого напряжения. Трехфазные сигналы переменного тока преобразуются в сигналы прямоугольной формы 180°, обозначаемые ULa, ULb, ULc, которые имеют разность 120 градусов между фазами. Если состояние сигналов квадратной волны определяется 0 или 1, состояние каждой трехфазной прямоугольной волны через 60° может быть представлено трехзначным кодом, который определяется как сигнал синхронизации. Поэтому для сигнала синхронизации имеется шесть разных трехзначных кодовых статусов в цикле напряжения питания. Каждый трехзначный код соответствует естественной точке коммутации, поэтому шесть разных трехзначных кодовых статусов в цепи напряжения питания определяют шесть естественных точек коммутации шести тиристоров. В таблице 1 показаны фаза сети, тиристор и соответствующий код состояния источника питания.
В то же время трехзначный код состояния напряжения питания также может использоваться для определения фазы трехфазного питания с помощью программного обеспечения. Если фактический цикл состояния питания чередуется в соответствии с порядком 101, 100, 110, 010, 011, 001, который идентифицируется как положительная фазовая последовательность. Если обратный цикл – он идентифицируется как обратная фазовая последовательность.
IV. ФАЗОВОЕ УПРАВЛЕНИЕ И РАСПРЕДЕЛЕНИЕ ИМПУЛЬСОВ
A. Методы синхронизации фаз
Управление фазовым сдвигом осуществляется таймером, разделенным на трехканальный и одноканальный способы отсчета времени в соответствии с количеством таймеров. Чтобы сохранить ресурсы таймера MCU, используется одноканальный метод отсчета времени, который использует один таймер и сразу же запускает SCR, когда наступает время регулирования.
Таблица 2 – Расчет времени регулирования
| Угол управления α | Угол задержки β | Флаг управления задержкой (FDEL) | Начальное время |
| 0°≤α<60° | β=α | FDEL=0 | Синхросигнал |
| 60°≤α<120° | β=α-60° | FDEL=6 | Синхросигнал |
| 120°≤α<180° | β=α-120° | FDEL=12 | Синхросигнал |
Поэтому время регулирования начинается с синхросигнала в диапазоне времени от 0° до 60°. Угол управления α (от 0° до 180°, считая от естественной точки коммутации) программно разделен на три области, как показано в таблице 2. Когда угол отпирания α больше 60°, используется угол задержки β в качестве времени отсчета. Угол задержки β также отсчитывается от точки естественной коммутации, а флажок управления временной задержкой (FDEL) указывает область угла управления. Таким образом, шесть тиристоров могут управляться сдвигом сегментной фазы, разделенной синхронным сигналом с одним таймером, а именно 60° сегментным триггером.
B. Распределение импульсов управления
Как показано в таблице 3, порядок распределения импульсов может быть определен в соответствии с последовательностью фаз, наличием питания и флагом управления задержкой (FDEL). Сигналы синхронизации поступают в MCU через его порт RB4, RB5, RB6 (микроконтроллер PIC16F877A имеет возможность прерывания сразу же по изменению логического напряжения порта RB7:RB4). Когда изменяется состояние питания (изменяется напряжение PORTB), MCU запускает программу распределения импульсов управления. В соответствии с заданной величиной управляющего напряжения Uk, заданной таблицей α или рассчитанным значением угла управления α, получают угол задержки β и флаг управления задержкой (FDEL), при использовании таблицы 2. Угол β будет преобразован во время задержки и затем запустит таймер. Выполнится чтение состояние питания, запрос таблицы распределения импульсов управления в соответствии с FDEL, затем получение импульсного слова управления и в конце отправление импульса управления через порт микроконтроллера.
Таблица 3 – Распределение импульсов
| Код статуса напряжения ULa ULb ULc | Флаг управления задержкой (FDEL) | Прямая послед-ть фаз | Обратная послед-ть фаз | ||
| ULa | ULb | ULc | 1 | 1 | |
| 1 0 1 | VT1 VT6 | VT6 VT5 | VT5 VT4 | ||
| 1 0 0 | VT2 VT1 | VT1 VT6 | VT6 VT5 | ||
| 1 1 0 | VT3 VT2 | VT2 VT1 | VT1 VT6 | ||
| 0 1 0 | VT4 VT3 | VT3 VT2 | VT2 VT1 | ||
| 0 1 1 | VT5 VT4 | VT4 VT3 | VT3 VT2 | ||
| 0 0 1 | VT6 VT5 | VT5 VT4 | VT4 VT3 | ||
Используя одноканальный метод отсчета времени, когда угол управления α изменяется в районе 60° и 120°, возникает явление потерянных импульсов. Чтобы решить эту проблему, сначала оцените изменения FDEL в программе прерывания, которая отвечает на изменение логического напряжения PORTB. Если FDEL изменяется с 6 до 1 или изменяется с 12 до 6, MCU необходимо отправить импульс повторного запуска в соответствии с таблицей 4.
Кроме того, для упрощения схемы и уменьшения размера импульсного трансформатора используется режим пакета импульсов. Последовательность импульсного сигнала модулируется с частотой 12 кГц с помощью PWM-порта микроконтроллера. Через оптическую изоляцию и усилитель мощности пакет импульсов подключается к управляющему электроду с помощью импульсного трансформатора.
Таблица 4 – Соответствие между фазой напряжения питания, тиристором и кодом статуса
| Фаза питающего напряжения | Код статуса | |
| 0 | 6 | |
| 1 0 1 | VT6 VT5 | VT5 VT4 |
| 1 0 0 | VT1 VT6 | VT6 VT5 |
| 1 1 0 | VT2 VT1 | VT1 VT6 |
| 0 1 0 | VT3 VT2 | VT2 VT1 |
| 0 1 1 | VT4 VT3 | VT3 VT2 |
| 0 0 1 | VT5 VT4 | VT4 VT3 |
V. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Симуляция проводилась в среде PROTEUS. Первое – необходимо написать файл языка C с помощью программного обеспечения MAPLAB в соответствии с принципом, описанным выше. А затем сгенерировать hex-файл, который соответствует PIC16F877A. Второе – создать модели в программном обеспечении PROTEUS. В конце – импортировать машинный код в микроконтроллер PIC16F877A для выполнения симуляции.
Результаты моделирования используются для проверки системы и последующей реализации управления. Для сравнения были проведены три варианта моделирования: 1) подача импульса управления, когда угол отпирания больше 0° и меньше 60°; 2) подача импульса управления, когда угол отпирания больше 60° и меньше 120°; 3) подача импульса управления, когда угол отпирания больше 120° и меньше 180°.
На рисунке 3 показана форма фазы A, форма синхросигнала и сигнал импульса управления при α=35°. Аналогично, рис. 4 и рис. 5 были получены, когда α при углах 90° и 150°.

Рисунок 3 – Результат симуляции при α=35°
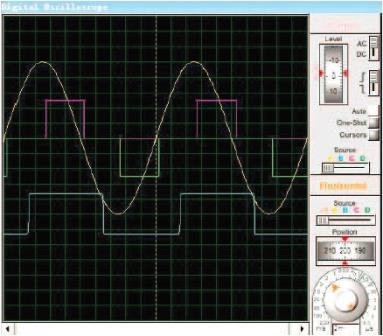
Рисунок 4 – Результат симуляции при α=90°
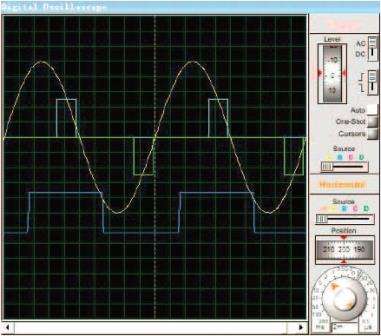
Рисунок 5 – Результат симуляции при α=150°
V. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
В этой статье основное внимание уделяется проектированию и внедрению системы импульсно-фазового управления трехфазным напряжением. Теория и моделирование показывают, что режим цифрового управления тиристорами на основе микроконтроллера возможен для интегрированного управления трехфазной цепью. Программное обеспечение достигло адаптивной последовательности фаз, в отличие от аппаратного обеспечения, которое использовалось для определения последовательности фаз ранее. Он не только уменьшает внешние компоненты, но и повышает надежность системы управления. Ресурсы таймера MCU сохраняются благодаря преимуществам одноканального отсчета времени. В симуляции управление углом отпирания тиристора и функции распределения импульсов принимают модульную конструкцию, и этот разработанный алгоритм достиг лучшего результата управления.
Перечень ссылок
- Shu-pu Sun, Ming Li, Xiao-jie Wu. Power Electronics, 1rd ed. China University of Mining &Technology Press, Xuzhou (in chinese). pp.215-226, July 2000.
- R.M.Hamouda. “A Comparative Study on the Starting Methods of Three Phase Wound-rotor Induction Motors,” IEEE Transaction on Energy Conversion, Vol.14, No.4,pp.918-922, 1999.
- T.A.Lipo. “The Analysis of Induction Motors with Voltage Control by Symmetrically Triggered Thyristors,” IEEE Transaction Apparatus and Systems, Vol. PAS-90, No.2, pp.515-525, 1971.
- Zhao-an Wang, Jun Huang. Power Electronics, 4rd ed. Machinery Industry Press, Beijing (in chinese). pp.113-118. 2007.
- Zenginobuz, Gurkan, Cadirci, Isik, Ermis, Muamme. “Performance Optimization of Induction Motors During Voltage-controlled Soft Starting,” IEEE Transactions on Energy Conversion, Vol.19, No.2, pp.278-288, June, 2004.
- Antonio Ginart, A.Maduro, R.Pinero. “High Starting Torque for AC SCR Controller,” IEEE Transaction on Energy Conversion, Vol.14, No.3, pp.553-559, 1999.
- R.M.Hamouda, et al. “A Comparative Study on the Starting Methods of Three Phase Wound-rotor Induction Motors,” IEEE Trans.Energy Conversion, Vol.14,No.4.pp.918-922, 1999.