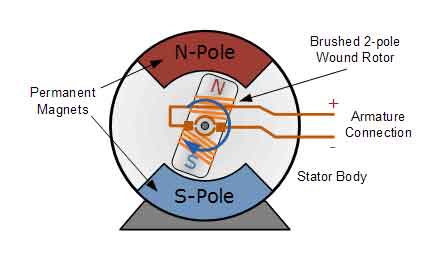
Рисунок 1 – Двухполюсный двигатель с постоянными магнитами
Автор:Math Dirjish
Автор перевода:И.Д. Онищенко
Источник:
Техническое издание electronics tutorials
Существует множество способов управления скоростью двигателей, но один из свмых простых способов – использование широтно–импульсной модуляции.
Но прежде чем мы начнем рассматривать широтно–импульсную модуляцию, нам нужно понять, как работает двигатель постоянного тока.
Наряду с шаговыми двигателями, двигатель постоянного тока с постоянными магнитами (PMDC) является наиболее часто используемым типом двигателя постоянного тока, обеспечивающим постоянную скорость вращения, которую можно легко контролировать. Маленькие двигатели постоянного тока, идеально подходят для использования в приложениях, требующих контроля скорости, например, в небольших игрушках, моделях, роботах и других подобных электронных схемах.
Электродвигатель постоянного тока состоит в основном из двух частей: неподвижного корпуса двигателя, называемого «статор», и внутренней части, которая вращается создавая движение, под названием «Ротор». Для машин постоянного тока ротор обычно называют «Якорь».
Обычно в малогабаритных электродвигателях постоянного тока статор состоит из пары неподвижных постоянных магнитов, создающих равномерный и постоянный магнитный поток внутри двигателя, что дает этим типам двигателей свое название двигатель постоянного тока с постоянными магнитами .
Якорь двигателей состоит из отдельных электрических катушек, соединенных вместе в круговой конфигурации вокруг своего металлического тела, создающего Северный полюс, затем Южный полюс, а затем Северный полюс и т. д.
Ток, протекающий внутри этих якорных катушек, создает необходимое электромагнитное поле. Круговое магнитное поле, создаваемое обмотками якоря, создает как северный, так и южный полюса вокруг якоря, которые отталкиваются или притягиваются постоянными магнитами статора, создавая вращательное движение вокруг центральной оси двигателей
Рисунок 1 – Двухполюсный двигатель с постоянными магнитами
Когда якорь вращается, электрический ток протекает от клемм двигателей к следующим наборам обмоток якоря через угольные щетки, расположенные вокруг коллектора, производя магнитное поле другого направления, и каждый раз, когда ротор вращается, вступает в работу новый набор обмоток якоря, заставляя якорь вращаться больше и больше и так далее.
Таким образом, скорость вращения двигателя постоянного тока зависит от взаимодействия между двумя магнитными полями, одно из которых создается стационарными постоянными магнитами статора, а другое – вращающимися электромагнитами на якоре, и, контролируя это взаимодействие, мы можем контролировать скорость вращения.
Магнитное поле, создаваемое постоянными магнитами статора, является фиксированным и, следовательно, не может быть изменено, но если мы изменим силу электромагнитного поля якоря, контролируя ток, протекающий через обмотки, будет вырабатываться болшьший или меньший магнитный поток, приводящий к ускорению или замедлению.
Таким образом скорость вращения электродвигателя постоянного тока (N) пропорциональна приложенной э.д.с. (Vb) электродвигателя, деленному на магнитный поток (который для постоянного магнита является постоянным).
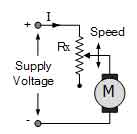
Рисунок 2 – Схема включения реостата в якорную цепь
Итак, как мы контролируем величину тока протекающего через двигатель? Многие люди пытаются контролировать скорость двигателя постоянного тока с использованием большого переменного резистора (реостата) последовательно с двигателем, как показано на рисунке 2.
Хотя это метод работает, так же как и с автогонками Scalextric, он генерирует много тепла и теряет мощность на сопротивлении. Один из простых способов контролировать скорость двигателя – регулировать величину напряжения на его клеммах, и это может быть достигнуто с помощью «Широтно импульсной модуляции» или ШИМ.
Как следует из названия, управление скоростью широтно–импульсной модуляцией работает, управляя двигателем с помощью серии импульсов «ВКЛ–ВЫКЛ» и изменяя рабочий цикл, долю времени, в течение которого выходное напряжение «включено», по сравнению с «ВЫКЛ» при сохранении постоянной частоты.
Мощность, подаваемая на двигатель, может регулироваться путем изменения ширины этих питающих импульсов и, таким образом, изменения среднего значения постоянного напряжения, подаваемого на клеммы двигателя. Изменяя или модулируя синхронизацию этих импульсов, можно управлять скоростью двигателя, т. е. чем дольше импульс «ВКЛ», тем быстрее вращается двигатель, а чем более импульс «ВЫКЛ», тем медленнее двигатель будет вращаться.
Другими словами, чем шире ширина импульса, тем большее среднее напряжение подается на клеммы двигателя, тем сильнее магнитный поток внутри обмоток якоря и тем быстрее вращается двигатель, и это показано ниже.
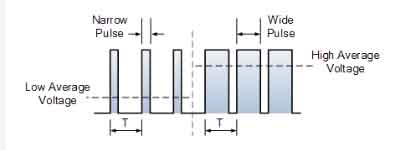
Рисунок 3 – Форма ШИМ сигнала
Использование широтно–импульсной модуляции для управления не большим двигателем имеет преимущество в том, что потери мощности в переключающем транзисторе малы, поскольку транзистор либо полностью «ВКЛ», либо полностью «ВЫКЛ». В результате транзистор имеет значительно меньшую рассеиваемую мощность, что дает ему линейный тип управления, что приводит к лучшей стабильности скорости.
Также амплитуда напряжения двигателя остается постоянной, поэтому двигатель всегда находится в зоне полного момента. В результате двигатель может вращаться гораздо медленнее, не останавливаясь. Итак, как мы можем генерировать сигнал модуляции ширины импульса для управления двигателем? Легко, используйте схему Astable 555 Oscillator, как показано ниже:
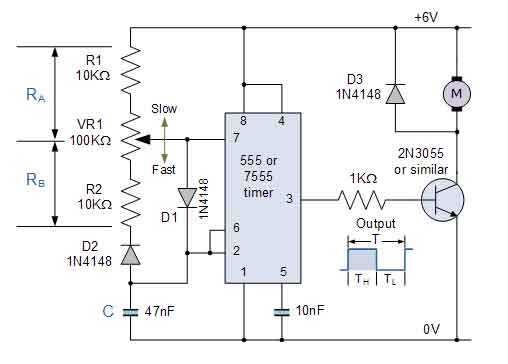
Рисунок 4 – Схема ШИМ генератора
Эта простая схема, основанная на привычной микросхеме таймера NE555 или 7555, используется для получения требуемого сигнала широтно–импульсной модуляции на выходе с фиксированной частотой. Конденсатор времени C заряжается и разряжается током, протекающим через резисторы синхронизации RA и RB.
Выходной сигнал на контакте 3 NE555 равен напряжению питания, полностью переключающему транзисторы «ВКЛ». Время, необходимое для зарядки или разряда С, зависит от значений RA, RB.
Конденсатор заряжается через цепь RA, но перенаправляется вокруг резистивной сети RB и через диод D1. Как только конденсатор заряжается, он немедленно разряжается через диод D2 и сеть RB в контакт 7. Во время процесса разрядки уровень на выводе 3 находится на уровне 0 В, а транзистор выключен. Таким образом время, затрачиваемое на заряд конденсатора, прохождения одного полного цикла заряда–разряда, зависит от значений RA, RB и C и может быть получена, как:
Время TH, для которого выход «ON»: TH = 0,693 (RA) *C
Время, TL, для которого выход «OFF»: TL = 0.693 (RB) *C
Общее время включения «ON» – «OFF», заданное как: T = TH + TL, при этом выходная частота равна ƒ = 1 / T
При показанных значениях компонентов рабочий цикл сигнала может быть отрегулирован от примерно 8,3% (0,5 В) до примерно 91,7% (5,5 В) с использованием источника питания 6,0 В. Частота постоянна около 256 Гц, и двигатель включается «ВКЛ» и «ВЫКЛ» с такой частотой.
Резистор R1 плюс «верхняя» часть потенциометра, VR1 представляют резистивную цепь RA. А «нижняя» часть потенциометра плюс R2 представляет собой резистивную цепь RB выше.
Эти значения могут быть изменены для различных приложений и двигателей постоянного тока, но при условии, что схема 555 работает достаточно быстро при минимальном значении в несколько сотен герц, при вращении двигателя не должно быть рывков.
Диод D3 – наш старый любимый обратный диод, используемый для защиты электронной схемы от индуктивной нагрузки двигателя. Кроме того, если нагрузка двигателя высокая, установите радиатор на транзистор переключения или MOSFET.
Широтно–импульсная модуляция является отличным методом контроля количества энергии, подаваемой на нагрузку, без потери энергии. Вышеуказанная схема также может использоваться для управления скоростью вентилятора или для уменьшения яркости ламп постоянного тока или светодиодов. Если вам нужно ее контролировать, используйте для этого широтно–импульсную модуляцию.