Аннотация
В данной статье описывается развитие формирования входных данных для контроля раскачивания поворотного механизма с 3 степенями свободы. Нелинейное уравнение движения в пространстве состояний? с использованием техники Эйлера-Лагранжа для башенного крана, чтобы контролировать и уменьшить влияние колебаний во время вращения. Ток прямоугольного импульса осуществляется для определения характеристики параметры системы для проектирования и оценки ввода методом управления формированием. Положительный и модифицированный Входные формирователи отрицательной амплитуды (SNA) с производной разрабатываются на основе свойств системы. Результаты моделирования реакции роторной крановой системы на фасонные входы представлены во времени и частоте. Характеристики схем управления рассматриваются в сроки снижения угла качания и характеристики времени отклика. Кроме того, надежность схем управления с прямой связью обсуждается. Наконец, сравнительная оценка предложенного метода контроля представлены и обсуждены.
Введение
Основной целью управления краном является транспортировка груз как можно быстрее, не вызывая чрезмерного колебания в конечной позиции. Тем не менее, большинство общих кранов приводит к поворотному движению, когда груз внезапно остановился после быстрого движения. Производительность точности движения зависит от демпфирующей способности системы. Демпфирующая способность динамической системы может быть улучшена пассивными или активными методами демпфирования. В пассивном подходе, демпфирование колебаний увеличивается путем развертывания внешних демпферов, таких как приборные панели или демпферы вязкости. Контроль обратной связи также может быть использован в качестве активного подхода в широкой полосе нечувствительности.
Различные методы управления системой кранов на основе были предложены системы с открытым и закрытым контуром. В замкнутой система, контроллер нечеткой логики также предлагается для управления крановой системой несколькими исследователи. Предложены нечеткие логические контроллеры состоящих из регуляторов положения, а также контроллеров против качания. Тем не мение, разработанная нечеткая логика все еще нуждается в поиске удовлетворительные правила, функция членства, фаззификация и параметр деффузификации эвристически.
Различные исследователи использовали нейронную сеть (НС) в качестве контроллер в своих крановых системах. Рекуррентные НС используются в три степени свободы поворотного крана с роем частиц оптимизации (PSO) и двоично-генетического алгоритма (GA). Кроме того, применяется трехслойная НС в качестве контроллера с обучением на основе генетического алгоритма (на основе GA) для того, чтобы контролировать подавление колебания нагрузки для поворотной крановой системы. С другой стороны, используется Radial Basis Функциональные сети вместе с PSO для управления положением и раскачиванием крана соответственно.
Другой подход к управлению крановой системой используя методы прямого контроля. Прямое управление схемы в основном разработаны для подавления влияния и вовлечения в разработку входных данных управления через рассмотрение физических и колебательных свойств системы, так что колебания системы в режимах реагирования снижены. Раннее воплощение этого поколения команды самоотмены было разработано Смитом, но его техника была чрезвычайно чувствительны к ошибкам моделирования. Певица и Сиринг разработали справочные команды, которые были достаточно надежными, чтобы быть эффективным на широком спектре систем. Эта новая надежная техника называется входным формированием.
В данной статье представлена разработка схем управления для контроля качания поворотной крановой системы. Рассматривается роторная крановая система и динамическая модель. Система получена с использованием формулы Эйлера-Лагранжа. Токовый вход в форме прямоугольного импульса используется для определения характерных параметров системы для проектирования и оценки методов управления входным формированием. входные формирователи затем разрабатываются на основе свойств системы контроля против качания. Реакция поворотной крановой системы на фасонные входы представлены во временной и частотной областях. Выступления формирователя проверяются на предмет уменьшения угла поворота и время отклика спецификации. Надежность схемы управления входным формированием также обсуждаются.
Башенный кран с тремя степенями свободы
Система поворотного крана с тремя степенями свободы, как показано на Рис.1 состоит из трех подсистем, которые являются полезной нагрузкой, стрелой и башеней. Башня крана выполняет роль основного компонента в 3-DOF поворотной крановой системы, которая способна путешествовать во вращательном движении. Горизонтальный компонент в портальной системе, которая также известна как стрела или установлен на башне. По часовой стрелке и против часовой стрелки движения можно контролировать с помощью двигателя для приведения в действие.
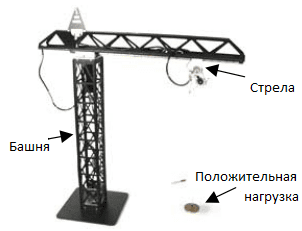
Рисунок 1 – Башенный кран с тремя степенями свободы.
Динамическое моделирование крана
Моделирование крановой системы необходимо и важно в процедуре проектирования контроллера. В 3-DOF поворотной крановой системе, подсистема башни может быть смоделирована как поворотный козловой кран предполагая, что положение тележки фиксировано, полезный груз качается, угол в горизонтальной составляющей всегда равен нулю, а высота полезной нагрузки фиксирована. Таким образом, единственное подвижное соединение - это стрела поворот вокруг башни и угол наклона полезной нагрузки, который перпендикулярно стреле.
На рис. 2 приведена принципиальная схема и описание поворотной крановой системы или башенная подсистема, в которой моделируется жесткий поворотный рычаг, и предполагается, что тележка остается неподвижной в конце стрелы на расстоянии j из башни крана. Полезная нагрузка фиксируется на высоте lp от шкива тележки и моделируется как маятниковая система.
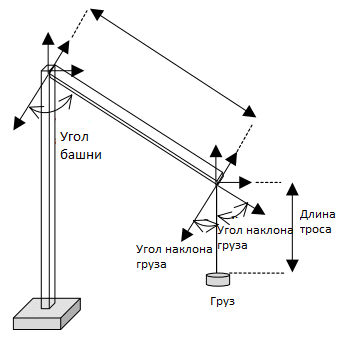
Рисунок 2 – Описание поворотной крановой системы.
Роторная крановая система моделируется в форме пространства состояний рассматривая нелинейное уравнение движения, которое получены с использованием техники Эйлера-Лагранжа. Государственное пространство уравнение дается как

и система вывода может быть получена как
где
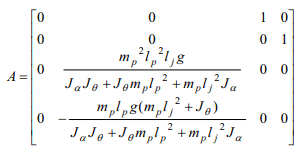
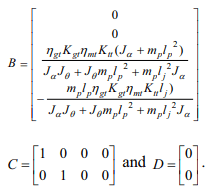
mp - центр масс полезной нагрузки, lp - длина стрелы, lj - длина полезной нагрузки, J обозначает момент инерции башни и полезной нагрузки соответственно и g является силой тяжести эффекта. Между тем Kgt, Ktt, GT и MT обозначает башенное передаточное число редуктора двигателя, постоянный момент двигателя, КПД двигателя и КПД башенного двигателя соответственно.
Список использованной литературы
1. H.M. Omar, “Control of gantry and tower cranes,” Ph.D. Thesis, M.S. Virginia Tech, 2003.
2. T-S. Yang, K.-S. Chen, C.-C. Lee and J.-F. Yin, “Suppression of Motion-Induced residual vibration of a cantilever beam by input shaping,” J. of Engineering Mathematics, 54, 2006, pp.1–15.
3. Wahyudi and J. Jalani., “Design and implementation of fuzzy logic controller for an intelligent gantry crane system,” Proceedings of the 2nd International Conference on Mechatronics, 2005, pp. 345- 351.