
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования
- 3. Обзор существющих систем стабилизации
- 4. Выбор аппаратной части
- 4.1 L298 Dual H–Bridge драйвер
- 4.2 Понижающий модуль на микросхеме MP1584EN
- 4.3 Повышающий модуль на микросхеме XL6009
- 4.4 Радио модуль NRF24L01+
- 4.5 Датчик тока на 5A ACS712
- 5. Тестовый образец модели
- 6. Пульт управления моделью
- Выводы
- Список источников
Введение
Не для кого не секрет что человеку свойственно совершать ошибки, а также отвлекаться. Все это возможно в процессе управления автомобилем. Но если человек ошибся при написании текста, то это скорее всего будет стоить несколько минут что бы исправить ошибку. Но вот если ошибку допустить при управлении автомобилем, тогда возможности на ее исправление может и не быть. В такой ситуации на помощь приходят электронные помощники, установленные в автомобиле, которые безустанно следят за множеством датчиков и показаний что бы в случае ошибки или экстренной ситуации на дороге взять управление на себя и спасти ситуацию.
1. Актуальность темы
С каждым годом количество автомобилей на дорогах только растет, а с ним вместе растет и вероятность ДТП. Для обеспечения безопасности участников дорожного движения было создано множество систем помощи водителю. Но просто создать систему и сразу устанавливать ее в полно размерный автомобиль не рационально. Для начала необходимы тесты на меньших моделях, где можно все быстро поменять, изменить конфигурации и другие различные параметры. Как раз для таких целей и необходима тестовая платформа.
2. Цель и задачи исследования
Целью магистерской работы является создание модели радиоуправляемого автомобиля а так же систему его стабилизации.
Основные задачи исследования:
- Выбор микроконтроллера;
- Выбор аппаратной части робота;
- Составление программы стабилизации модели;
- Анализ полученных результатов.
3. Обзор существющих систем стабилизации
Все средства безопасности современного автомобиля можно разделить на пассивные (ремни и подушки безопасности, подголовники и т.д.) и активные (ABS, ESP и другие). Главная задача активных систем безопасности – помочь водителю избежать возможной аварии, то есть не допустить срабатывание средств пассивной безопасности.
Первой активной системой безопасности в автомобиле стала антиблокировочная система тормозов ABS (Anti–lock Brake System). ABS предотвращает блокировку колес в момент резкого торможения, и сохраняет управляемость автомобиля. То есть система позволяет при экстренном торможении объехать препятствие, что при заблокированных колесах будет невозможно.
С помощью нескольких датчиков установленных на колесах, ABS чувствует момент блокировки и берет управление тормозами на себя. Работу ABS можно ощутить по вибрации педали тормоза, главное при этом помнить, что отпускать педаль нельзя. Нужно, наоборот, сильнее на нее давить, чтобы торможение оставалось максимально эффективным.
Для более эффективной работы ABS к ней добавили систему электронного распределения тормозного усилия EBD (Electronic Brake Distribution). EBD обеспечивает равномерное распределение тормозного усилия между всеми четырьмя колесами. Система дает возможность каждому из колес получить оптимальное сцепление с дорогой. Это позволяет автомобилю оставаться более устойчивым при резком торможении.
Эффективность экстренного торможения очень зависит от силы нажатия на педаль тормоза. Чтобы помочь водителю в аварийной ситуации резко затормозить к ABS прибавился еще один помощник – система помощи при экстренном торможении BA (Brake Assist).
BA вступает в работу, если водитель нажимает на педаль тормоза резко, но недостаточно сильно.
Многие аварии происходят из-за того, что водитель не успевает вовремя нажать на тормоз и теряет контроль над машиной. Чтобы подстраховать водителя от неправильных действий производители начали создавать системы, которые самостоятельно определяют сложною ситуацию и мгновенно пытаются стабилизировать автомобиль. В первую очередь речь идет об антипробуксовочой системе ASR и системе курсовой устойчивости ESP.
Антипробуксовочная система ASR (Anti–Slip Regulation), она же TRC (Traction control), создана для предотвращения пробуксовки ведущих колёс.
С помощью датчиков ABS система чувствует пробуксовку колес и снижает обороты двигателя, а при необходимости притормаживает нужные колеса. То есть, как бы сильно водитель не давил на газ эффектной пробуксовке ему добиться не удастся.
Но иногда работа системы может не дать автомобилю тронуться с места. Например, при старте с очень скользкого участка (лед, снег) колеса мгновенно срываются в пробуксовку и ASR вынуждена их тормозить, при этом не позволяя машине тронуться с места. Чтобы избежать такой ситуации в автомобиле должна присутствовать кнопка отключения системы.
Самой совершенной активной системой безопасности автомобиля считается система курсовой устойчивости ESP (Electronic Stability Program).
Объединяя в своей работе возможности всех предыдущих систем, ESP может не только исправлять, но предугадывать возникновение опасной ситуации. Для этого система использует еще и целый ряд своих датчиков. Основные из них это датчик скорости вращения колес, положения руля, угловой скорости и поперечного ускорения.
Система вступает в действие, когда появляться опасность возникновения заноса (сноса) и потери контроля над автомобилем. Постоянно контролируя все свои датчики, ESP за 20 миллисекунд определяет, какие колеса нужно притормозить и насколько необходимо снизить обороты двигателя для стабилизации движения автомобиля.
Чтобы водителю было проще сохранить контроль над машиной самые современные системы стабилизации, еще и помогают повернуть руль в нужную сторону.
Вмешиваясь в работу усилителя рулевого управления, продвинутое
ESP позволяет вращать руль в нужную ей сторону намного легче, чем в не нужную.
Система курсовой устойчивости появилась на автомобиле уже более десяти лет назад и за это время не раз обновлялась, усовершенствовалась и дополнялась. Каждый производитель по-своему старался ее улучшить, давал ей свое название, меняя местами буквы в аббревиатуре. Но до сих пор никто не смог придумать активную систему безопасности способную превзойти ESP[1].
4. Выбор аппаратной части
Для тестирования и отладки программы в ходе магистрской работы будет использованна радиоуправляемая малель, также разработанная в ходе магистрской работы. Модель состоит из следующих датчиков и модулей: Понижающий модуль на микросхеме MP1584EN, Повышающий модуль на микросхеме XL6009, Радио модуль NRF24L01+, Датчик тока на 5A ACS712, L298 Dual H–Bridge драйвер.
4.1 L298 Dual H–Bridge драйвер
L298n представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4.5 В до 46 В. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298n имеет TTL совместимые входы. В L298n существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи.
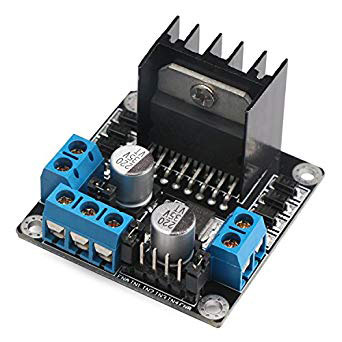
Рисунок 1 – Двойной мостовой драйвер L298n
Микросхемы L298n имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С [2].
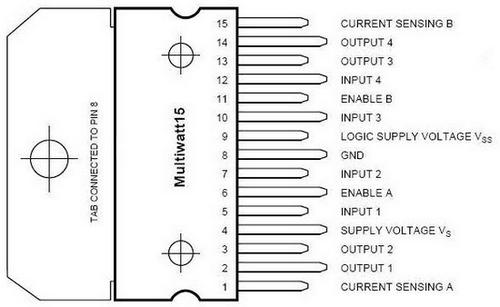
Рисунок 2 – Расположение выводов драйвера L298n
| 1 | SENS-A | Контроль тока 1 и 2 каналов |
|---|---|---|
| 2 | OUT2 | Выход 2 канала |
| 3 | OUT3 | Выход 3 канала |
| 4 | Vs | Питание нагрузки |
| 5 | IN1 | Вход 1 канала |
| 6 | EN-A | Разрешение работы 1 и 2 канала |
| 7 | IN2 | Вход 2 канала |
| 8 | GND | Общий вывод |
| 9 | Vss | Питание логики (+5V) |
| 10 | IN3 | Вход 3 канала |
| 11 | EN-B | Разрешение работы 3 и 4 канала |
| 12 | IN4 | Вход 4 канала |
| 13 | OUT3 | Выход 3 канала |
| 14 | OUT4 | Выход 4 канала |
| 15 | SENS-B | Контроль тока 3 и 4 каналов |
| Максимальное напряжение питания Vs | 50V |
|---|---|
| Максимальное напряжение питания Vss | 7V |
| Входное напряжение (IN, EN) | -0,3...7V |
| Напряжение на входах SENS | -1V...+2,3V |
| Максимальный постоянный выходной ток | ± 2A |
| Максимальный импульсный выходной ток (5ms однократно) | ± 3A |
| Максимальная рассеиваемая мощность | 25W |
| Диапазон температур | -25...+130°C |
Данный драйвер уже очень устрарел. Драйвер боботает на устаревших биполярных транзисторах, которые в открытом состоянии имеют довольно большое сопротивление. Как следствие драйвер не выдерживает нагрузки более 2А при внушительных размерах, а также всегда необходим радиатор для отвода тепла.
4.2 Понижающий модуль на микросхеме MP1584EN
Данный модуль представляет собой простой импульсный понижающий преобразователь постоянного напряжения на микросхеме MP1584EN[3]. Модуль имеет низкий уровень шума, а это очень важно, так как он выдает питание на микроконтроллер и радиомодуль, которые очень требовательны к стабильному питанию.
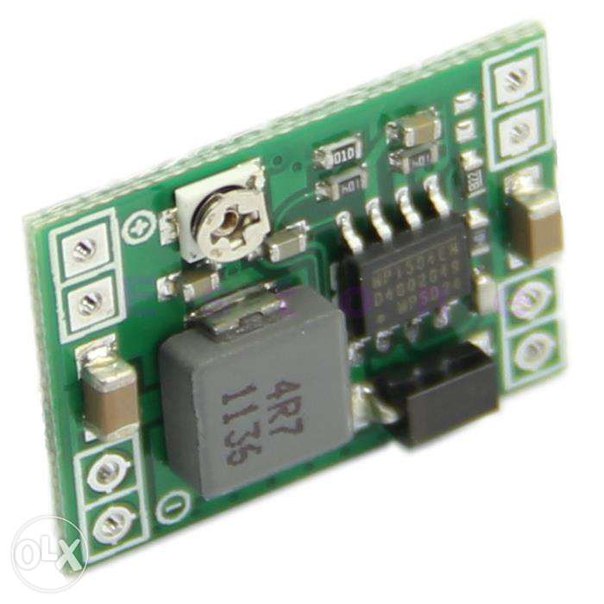
Рисунок 3 – Понижающий модуль на микросхеме MP1584EN
Для настройки выходного напряжения модуль имеет встроенный потенцеометр.
Характеристики стабилизатора:
- Входное напряжение: от 4.5В до 28В;
- Выходное напряжение:от 0.8В до 24В;
- Максимальный выходной ток: 3А;
В нашем случаее выходной ток модуля не превышеает 300мА, так что можно смело использовать его без радиатора, перегрева точно не будет.
4.3 Повышающий модуль на микросхеме XL6009
Модуль представляет собой импульсный повышающий преобразователь постоянного напряжения исполненный на микросхеме XL6009[4]. Микросхема достаточно распостраненная для изготовления преобразователей и уже проверенная временем.

Рисунок 4 – Повышающий модуль на микросхеме XL6009
Характеристики:
- Входное напряжение: от 3.5В до 32В;
- Выходное напряжение:от 6В до 35В;
- Максимальный входной ток: 4А;
В хоте тестов данного перобразователя в нашем режиме ратоты выяснилось, что преобрахователь имеет существенный нагрев дроселя а так же микросхемы. Для отвода тепла и более безопасной работы преобразователя в дальнейшем нужно предусмотреть радиатор для отвода тепла или возможно принудительный обдув.
4.4 Радиомодуль NRF24L01+
Радиомодуль для связи микроконтроллеров между собой. Работает на частоте 2.4ГГц[5] (не требующая разрешений частота, которая так же используется для WiFi), скорость до 2Мбит, управляется по интерфейсу SPI, питание 3.3В (можно использовать вывод 3.3В платы Arduino). Существенно дешевле xbee модуля, хорошо подходит для промышленных систем управления. Радиус действия – на открыйтой местности до 100м, в пределах квартиры, через две стены работает уверенно, через три - бывают потери сигнала.
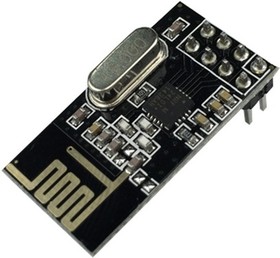
Рисунок 5 – Радиомодуль NRF24L01+
Характеристики:
- Скорость до 2Мбит (настраиваемая 2, 1, 0,25 Мб/с;
- 126 каналов связи, подключение один к многим, скачкообразная перестройка частоты;
- Аппаратный контроль ошибок, контроль адресации многоточечной связи;
- Низкое энергопотребление: 1.9–3.6В, 1мкА в режиме Power down;
- Модуляция GFSK;
- Встроенная 2.4ГГц антенна;
4.5 Датчик тока на 5A ACS712
Датчик постоянного тока ACS712[6] на эффекте Холла позволяет постаточно просто интегрировать его в схему и начать измерения тока. Датчик полностью готов к работе в микроконтроллером и не требует дополнительных компонентов. Все что нужно - это наличие аналогового входа на микроконтроллере.
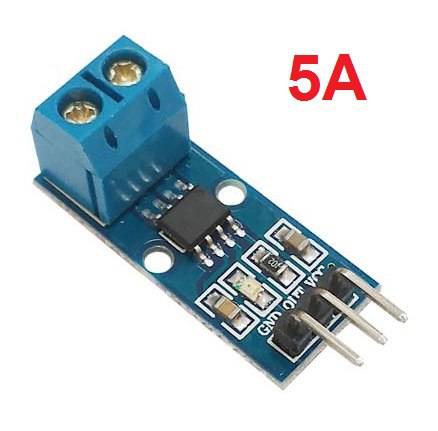
Рисунок 6 – Датчик тока на 5A ACS712
Характеристики:
- Диапазон измерения тока: до 5А;
- чувствительность: 185 мВ/А;
- максимальная полоса пропускания составляет: 80 кГц;
- напряжение питания датчика: 5В;
Так как в нашей модели имееться 3 электромотора которые создают вокруг себя магнитное поле, а датчик тока основан на эффекте Холла, необходимо разместить датчики как можно дальше от источника таких сильных помех.
5. Тестовый образец модели
Основой разрабатываемого робота является отладочная Arduino Nano[7] (ATmega328P)[8]. На платформе можно заметить 3 двигателя постоянного тока, два из которых приводят в движение модель и один на управление рулевым механизмом. В фронтальной части установлена сама отладочная плата и радиомодуль. Также драйвер для управлением двигателем поворота рулевых колес. В задней части расположен драйвер L298, который управляет двумя тяговыми двигателями, а также установлены датчики тока для измерения велечины тока протекающего в каждом двигателе. Еще в задней части модели установленны два повышающих модуля необходимых для повышения напряжения подаваемого на тяговые дигатели. Модули установленны друг–другу в параллель для увелечения максимального входного тока, а также уменьшения нагрева каждого их модулей. В центре установленна аккамуляторная баттарея, состоящая из трех Li-ion[9] аккамуляторов типоразмера 18650 подключенных послеедовательно для повышения напряжения, а так же платы заряда-защиты.
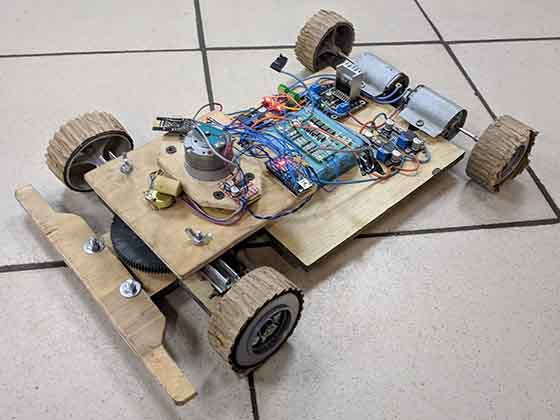
Рисунок 7 – Примерный вид модели
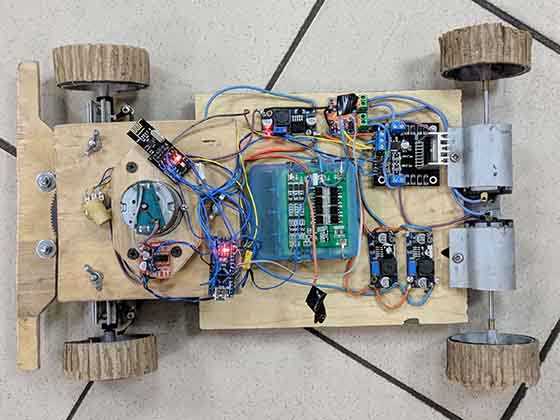
Рисунок 8 – Вид модели сверху

Рисунок 9 – Демонстрация работы рулевого механизма
(анимация: 9 кадров, бесконечный цикл повторения, 73 килобайт)
6. Пульт управления моделью
Для четкого и тактильного управлением моделью был разработан и исполнен пульт куркового типа. Пульт позволяет легко и удобно дозировать тягу и направление движения. Благодаря своей конструкцее управление моделью происходит интуитивно и не требует много времени для привыкания.
Пульт работает на точно такой же связке кантроллер – радиомодуль как и модель. Это все та же Arduino Nano и NRF24L01+. Так же на пульт дополнительно установлен не большой Oled дисплей. Дисплей позволяет выводить разнообразные данные на пульт, такие как данные заряда аккамуляторов модели и пульта, данные измерения тока двигателей, качество сигнала и любые другие данные которые только потребуються. На данный момент выводяться данные заряда аккамуляторов модели и пульта, а так же не обработанное значение тока двигателей.
Органами управления моделью служат рулевое колесо и нажимной курок. Данные органы напрямую воздействуют на потенцеометр 10К, который в свою очередь изменяет напряжеие на аналаговом входе микроконтроллера. Для возвращения в нулевую точку предусмотренны пружинные механизмы для обоих органов. В дальнейшем имеет смысл заменить потенцеометры на какой нибудь бесконтактный датчик положения, к примеру датчик хола или оптический датчик.
Для длительной работы пульта от одной заряддки было установленно две li–ion батареи формфактора 18650 соединенных паралельно для увеличения общей емкости. Для защиты и правильной зарядки аккамуляторов установлена плата защиты от перезаряда и переразряда аккамуляторов. Так же пульт имеет маломощный повышающий модуль. Он необходим для поддержания постоянного напряжения на микроконтроллере и не допукания понижения напряжения питания микороконтроллера ниже допустимого предела.

Рисунок 10 – Пульт управления моделью
В дальнейщем плнируеться спроектировать эргономичный корпус для пульта и изготовить его с помочью 3Д печати.
Выводы
На основе проведенной работы планируется:
- Установка энкодеров на каждое колесо.
- Установка датчика MPU9250 для точного ориентирования в пространстве.
- Доработка програмы стабилизации.
- Доработка механичсекой части модели и пульта.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Невидимые помощники водителя // rikauto.com.ua [Электронный ресурс]. – Режим доступа: https://rikauto.com.ua/..., свободный.
- Dual full-bridge drive L298N // tech.dmu.ac.uk [Электронный ресурс]. – Режим доступа: http://www.tech.dmu.ac.uk/..., свободный.
- MP1584 - Monolithic Power Systems // monolithicpower.com/ [Электронный ресурс]. – Режим доступа: https://www.monolithicpower.com/..., свободный.
- XL6009 Inverting DC/DC Converter // haoyuelectronics.com [Электронный ресурс]. – Режим доступа: http://www.haoyuelectronics.com/..., свободный.
- NRF24L01, Радиомодуль 2.4ГГц // chipdip.ru [Электронный ресурс]. – Режим доступа: https://www.chipdip.ru/product/nrf24l01, свободный.
- ACS712 Hall Effect-Based Linear Current Sensor // sparkfun.com [Электронный ресурс]. – Режим доступа: https://www.sparkfun.com/..., свободный.
- Отладочная плата Arduino nano // amperka.ru [Электронный ресурс]. – Режим доступа: http://wiki.amperka.ru/..., свободный.
- High-performance Microchip picoPower 8-bit AVR // microchip.com [Электронный ресурс]. – Режим доступа: https://www.microchip.com/..., свободный.
- LI-ION аккумулятор типа 18650 // aliexpress.com [Электронный ресурс]. – Режим доступа: https://ru.aliexpress.com/..., свободный.