Gripper Modelled on a Chameleon’s Tongue.
Источник:engineering.comOnRobot’s Gecko Gripper no longer stands alone in the class of collaborative grippers inspired by reptiles. Festo’s FlexshapeGripper is designed after the characteristic tongue of the chameleon.
The chameleon is able to catch a variety of different insects by putting its tongue over the respective prey and securely enclosing it. The FlexShapeGripper uses this principle to grip a wide range of objects in a form-fitting manner. Using its elastic silicone cap, it can even pick up several objects in a single gripping process and put them down together, without the need for a manual conversion.
The gripper consists of a double-acting cylinder, of which one chamber is filled with compressed air whilst the second one is permanently filled with water. This second chamber is fitted with elastic silicone moulding, which equates to the chameleon’s tongue. The volume of the two chambers is designed so that the deformation of the silicone part is compensated. The piston, which closely separates the two chambers from each other, is fastened with a thin rod on the inside of the silicone cap.
К производственным линиям относятся автоматические машины непрерывного литья заготовок (МНЛЗ). Современные машины непрерывного литья заготовок представляют собой целый комплекс сложного оборудования: механического, гидравлического, систем охлаждения и смазки, а также электроприводов с автоматизированной системой управления технологическим процессом. Установка данного устройства обеспечивает значительное сокращение потери металла, улучшение условий труда, постоянство условий производства и повышение производительности комбината. Мартеновские печи и кислородные конвертеры уже давно не актуальные при производстве стали на металлургических комбинатах. Серьезные капитальные вложения на внедрение новейших технологий (печи-ковши, электропечи, электрометаллургические мини-заводы и непрерывное литье стали) на заводах Украины и России, будут гарантировать производительность в 1 млн. 320 тыс. тонн высококачественной стальной заготовки в год.
Form-fitting gripping thanks to inversion
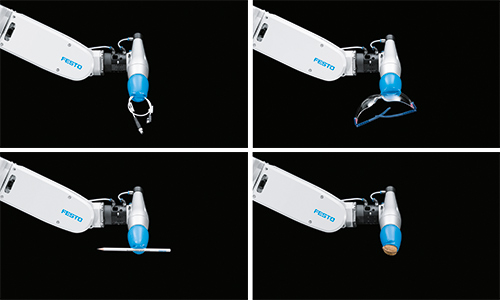
During the gripping procedure, a handling system guides the gripper across the object so that it touches the article with its silicone cap. The top pressurised chamber is then vented. The piston moves upwards by means of a spring support and the water-filled silicone part pulls itself inwards. Simultaneously, the handling system guides the gripper further across the object. In doing so, the silicone cap wraps itself around the object to be gripped, which can be of any shape, resulting in a tight form fit. The elastic silicone allows a precise adaptation to a wide range of different geometries. The high static friction of the material generates a strong holding force.
Drawbacks
This gripper is a fascinating example of biomimicry and design for flexible collaborative robotics. However, this type of gripper has some drawbacks. Firstly, grippers that rely on frictional forces can fail as particulates build up on the gripping surface. A regular cleaning regime would be required, whether manual or performed by the robot.
Another drawback of this design is the tool life. This type of gripper cannot last as long as a rigid gripper. In addition, failure of the water-filled chamber could be catastrophic in certain applications. End effectors often use sensing, commonly force sensing, to enhance repeatability. With this silicone membrane, sensing would be next to impossible. Due to the extreme flexibility in how the tool grips objects, precise picking or placing would also be difficult.