Аннотация
В данной статье представлена моделирование электрических машин и систем привода с использованием MATLAB И SIMULINK. С помощью пакета прикладных программ MATLAB получены графики переходных процессов по скорости w(t), току I(t) и моменту M(t) электродвигателя и сервопривода.
Введение
В данном пакете представлены компьютерные модели электрических машин, позволяющие оценить динамические характеристики открытых и замкнутых приводов переменного и постоянного тока. Реализация Simulink / Matlab принята из-за присущей ей интеграции векторизованных системных представлений в виде блок-схемы, методов численного анализа, графического изображения временных эволюций сигналов в сочетании с простой реализацией функциональности контроллеров и силовых электронных возбуждений. Разработка Simulink-моделей приводных агрегатов является относительно простой задачей, состоящей в объединении входного блочного представления различных составляющих систему компонентов. Этот подход обеспечивает мощный инструмент проектирования из-за простоты наблюдения эффектов модификаций параметров и изменений в конфигурациях системы и стратегиях управления. Под рубрикой "анимация" в серии видеороликов представлено движение электрических машин, магнитных полей и космических векторов.
Электрическая машина
Начальный шаг для математического моделирования машин переменного тока является описание их как в сочетании статора и ротора многофазных цепей с точки зрения так называемых фазовых переменных, а именно статора токи МСФО, ИБС Икс; токи Ротора Иар, ИБР, ПВК для индукционной машине или если, Икд, ikq синхронной машины; скорость вращения ротора ВМ ; и угловое перемещение ? между обмотки статора и ротора. Магнитная связь выражается через матрицу индуктивности, которая является функцией положения ?. Матричное выражение уравнений машины легко формулируется на языке Matlab или Simulink. Подробный пример такого подхода приведен в следующем разделе.
Следующим шагом является преобразование исходных систем отсчета ABC статора и Ротора в общую систему отсчета k или dq, в которой новые переменные для напряжений, токов и потоков можно рассматривать как двумерные пространственные векторы. В этой общей рамке индуктивности будут постоянн независимым положения. Рисунок 1 иллюстрирует различные системы отсчета (системы координат): триплет [, как BS и CS] обозначает трехфазные системы, прикрепленной к статору, а пара [как BS] соответствует эквивалентной двухфазной системы (zerosequence компоненты могут быть проигнорированы в y-подключен машин переменного тока, в которой нейтраль, как правило, единичный). Среди возможных вариантов кадров dq можно выделить следующие: a) рама статора, где wk = 0 b) рама Ротора, где wk = wm c) синхронная рама, связанная с частотой WS (возможно, изменяющейся во времени) возбуждения статора. d) рамка потока Ротора в которой D-ось выравнивается вверх с направлением вектора потока Ротора.
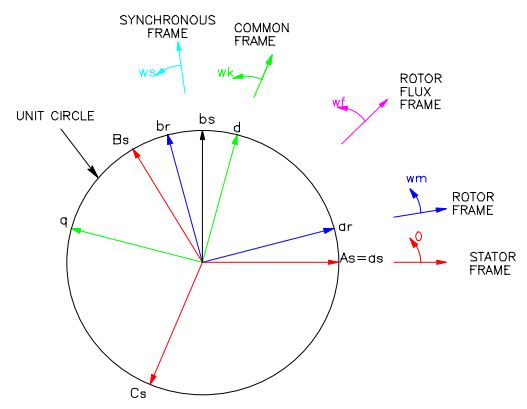
Рисунок 1 – Системы отсчета в анализе машины ac
Выбор общей рамки dq обычно продиктован ограничениями по симметрии наведенными конструкцией и возбуждением машины. При полной симметрии столкнутая в трехфазной машине индукции с сбалансированным синусоидальным возбуждением, любой один из 5 кадров можно использовать, хотя одновременная рамка более удобна в как очень по мере того как все сигналы появляются как постоянн dc в номинальном. Однако некоторые стратегии управления могут потребовать принятия конкретной системы, как это имеет место в случае векторного управления, когда система отсчета присоединена к вектору потока Ротора. При наличии асимметрии к несимметричному элементу присоединяется общая рама: в раме статора моделируется асинхронный двигатель с несимметричным возбуждением или несимметричные обмотки статора (в случае конденсаторного двигателя), где в качестве синхронной машины представлена рама Ротора. В общей рамке dq уравнения динамики машины представляются в виде дифференциальных уравнений с постоянными коэффициентами (независимо от положения ротора) и нелинейностями, ограниченными произведениями переменных, связанных с напряжениями скорости и компонентами крутящего момента.
Управление и регулирование
Имитация входных сигналов к машинам включает математически представление запрограммированной последовательности времени случаев как неожиданные применение или удаление механически нагрузок, ramping величины и частоты поданных напряжений тока, или даже изменения в значениях параметра (на пример, сопротивление Ротора). Аналогично функциональность силовых электронных возбуждений может быть реализована в виде простых математических выражений: в качестве примера ШИМ-сигнал может быть описан функцией signum[m-tri (t)], где m-Коэффициент модуляции и представляет собой треугольную форму волны единичной амплитуды, частоты ? и фазы ?.эта функция легко переводится в форму блока Simulink. Имитация регуляторов скорости или положения в сыстемах драйва достигана путем использования блока реле в типе гистерезиса регулятора, и увеличений, лета и интегратора просто сочетание из (включая ограничители для того чтобы включить antiwindup характеристики) в типе PI регулятора.
Стартовые условия
Начальные условия устанавливаются путем задания установившегося режима работы. Простейший случай встречается при моделировании запуска двигателя, для которого все начальные условия равны нулю. В некоторых других случаях начальные условия могут быть просто рассчитаны до запуска моделирования: например, при стационарном синусоидальном возбуждении асинхронный двигатель, работающий с заданной скоростью, может быть быстро проанализирован с точки зрения стандартной эквивалентной схемы фазора; с помощью методов фазора можно вычислить соответствующий момент нагрузки и начальные условия. Однако в большинстве случаев заданное рабочее состояние может быть получено только после запуска моделирования в течение времени, которое будет зависеть от начальной настройки этих начальных условий. Эта ситуация возникает, если в приведенном выше случае асинхронного двигателя указан крутящий момент вместо скорости или если механическая нагрузка является нелинейной функцией скорости. Это нормальная ситуация, столкнутая с входными сигналами силы электронными: номинальное состояние, достигается, когда форма волны выходного сигнала повторена каждому циклу переключения так, что значения в начале и конце цикла будут равны. При достижении стационарного состояния можно сохранить это так называемое конечное состояние и использовать его позже в качестве исходного состояния в обновленном моделировании, которое теперь включает в себя заданное время последовательных входных событий.
Simulink Модель
Эти математические уравнения могут быть представлены, как показано ниже, в виде блок-схемы, которая сохраняет взаимно однозначное соответствие между 2D пространственными векторами уравнений и векторизованными сигналами (шириной 2), появляющимися в представлении Simulink. Важно отметить, что связи потоков выбираются в качестве переменных состояния при моделировании. Обратите внимание, что, кроме сигналов скорости (скаляров), обозначенных синим цветом, все переменные являются векторами из 2 элементов, показанными красным цветом.
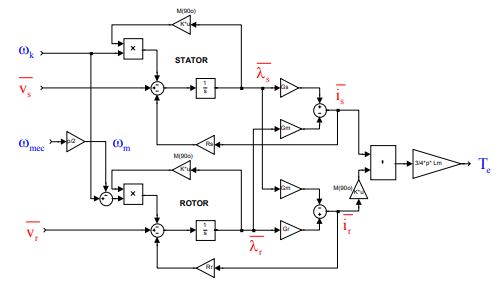
Рисунок 2 – Пространственно-векторная модель индукционной машины
Блок-схема модели синхронной машины
Цепи двигателя и демфера показаны в векторизованной форме с переменными показанными в красном цвете. Скалярные сигналы отображаются синим цветом.
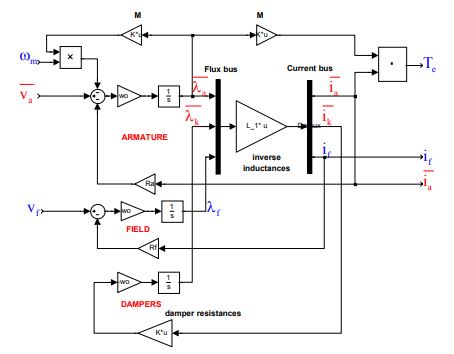
Рисунок 3 – Пространственно-векторная модель синхронной машины
Соглашения и формулировки:
Поскольку акцент в этой работе делается на приводах, так называемые моторные конвенции принимаются через out. Это означает, что электрические и механические силы считаются положительными для автомобилей действия. Furthermore, приняты, что будут течения положительны сразу в порты статора и ротора входного сигнала электрической машины. Положительное вращение против часовой стрелки от оси d к оси Q. Модели сформулированы и в системах SI и в-блока. Удельные система использует оценкой машины в качестве основы, как правило, мощности для асинхронных машин и ква вход для синхронных машин; базы напряжение номинальное пиковое линией и нейтралью напряжение [Вольт]; Базовая скорость синхронная скорость на базовой частоте. Хотя обе системы используют практически одинаковые обозначения,их легко идентифицировать по контексту. В частности, дифференциал времени dt (с t в секундах) становится wodt в безразмерном выражении. Кроме того, такие факторы, как 3/2 или p / 2, не фигурируют в формулировке для каждой единицы
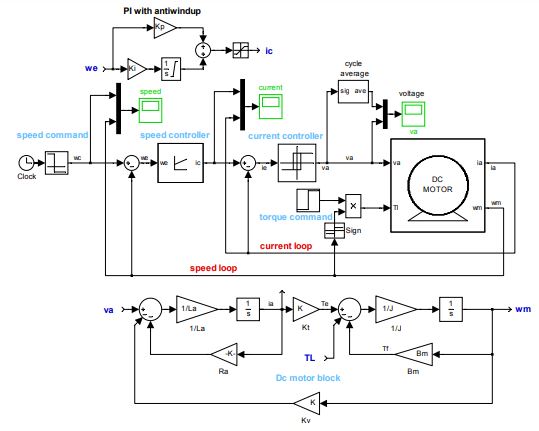
Рисунок 4 – Регулирование скорости каскада привода мотора DC
Выводы
В данной статье была представлена модель сервопривода регулируемого по скорости вращения роторов электродвигателя. С помощью пакета прикладных программ MATLAB были получены графики переходных процессов по скорости w(t), току I(t) и моменту M(t) электродвигателя и сервопривода.