Аннотация
Рассмотрен принцип работы системы управления перемещением рабочих органов, контура скорости и контура перемещения станка с числовым программным управлением. Найдено простое и понятное описание системы управления станком.
Станок с устройством числового программного управления (УЧПУ) является сложной электромеханической системой, для понимания работы которой требуются знания информационных, электротехнических и машиностроительных наук. Цель работы состоит в том, чтобы вкратце изложить принцип работы системы управления перемещением рабочих органов станка с УЧПУ. Статья может быть полезна студентам машиностроительных специальностей, сталкивающихся с данным классом станков впервые.
На рисунке представлена функциональная схема системы управления перемещением рабочих органов (для трехкоординатного станка: стол, салазки, бабка) по осям координат. Главным элементом УЧПУ является промышленная микро-ЭВМ. Устройство ЧПУ на базе микро–ЭВМ позволяет вводить рабочую программу по обработке детали и корректировать ее, используя устройства ввода–вывода (человеко-машинный интерфейс). В памяти ЭВМ может храниться несколько программ, что упрощает переналадку станка [1]. Различные цифровые и аналоговые интерфейсы УЧПУ позволяют взаимодействовать с электрооборудованием станка: исполнительными устройствами и датчиковой аппаратурой.
Система управления трехканальная, по одному каналу на каждый рабочий орган (стол – X, салазки – Y, бабка – Z). Система имеет два контура управления: контур скорости (КС) и контур перемещения (КП), в которой, по принципу подчиненного регулирования, контур скорости является внутренним для контура перемещения (контур тока тиристорного преобразователя не рассматривается) [2]. Далее описывается принцип работы одного из каналов системы.
Для перемещения рабочего органа в заданное положение (координату), с выхода цифро-аналогового преобразователя УЧПУ выдается аналоговое напряжение задания Uзад, значение которого соответствует определенной скорости вращения вала ДПТ. Напряжение Uзад поступает на вход тиристорного преобразователя, тиристорный преобразователь усиливает напряжение задания до уровня Uя, и запитывает якорь двигателя постоянного тока (ДПТ) подачи [3]. Вращение вала ДПТ приводит в движение быстроходный вал редуктора. Редуктор преобразует скорость n и крутящий момент быстроходного вала в требуемую скорость n1 и момент тихоходного вала. Шарико–винтовая передача (ШВП) преобразует вращательное движение тихоходного вала редуктора n1 в поступательное движение рабочего органа со скоростью V, называемой скоростью подачи [4].
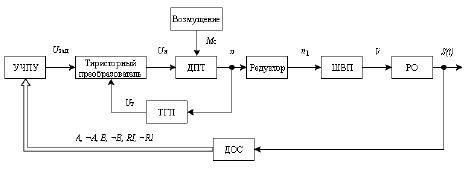
Рисунок 1 – Функциональная схема системы управления перемещением
Также ДПТ приводит вал тахогенератора (ТГП) со скоростью вращения n. С выхода тахогенератора напряжение Uт местной обратной связи (МОС) подается обратно в тиристорный преобразователь. МОС позволяет отслеживать системе автоматического регулирования (САР) тиристорного пре- образователя скорость n вращения вала ДПТ, поддерживая её постоянную величину при различных нагрузочных моментах МС на валу двигателя. Так организуется система стабилизации скорости вращения вала ДПТ, называемая контуром скорости.
Система управления перемещением охвачена петлей общей обратной связи (ООС), которая образует контур перемещения. ООС позволяет добиться позиционирования рабочего органа с заданной точностью. Текущее положение рабочего органа S(t) отслеживает датчик обратной связи (ДОС) линейных перемещений (иногда ДОС угловых перемещений). С выхода ДОС по цифровому интерфейсу в УЧПУ поступает набор импульсов, указывающий положение рабочего органа в измерительной системе ДОС [5]. Операционная система реального времени, установленная на микро-ЭВМ, отслеживает значение S(t), и, при попадании S(t) в окрестность заданной координаты (S(t) = Sзад ± е), называемую рассогласованием, останавливает ДПТ. Таким образом, рабочий орган перемещается на заданную координату Sзад со скоростью подачи V.
Библиографические ссылки
1. Ловыгин А. А., Васильев А. В., Кривцов С. Ю. Современный станок с ЧПУ и CAD/CAM
система. М. : Эльф ИПР, 2006. 286 с.
2. Воронин С. Г. Электропривод летательных аппаратов [Электронный ресурс]. http://model.exponenta.ru (дата обращения: 03.04.2016).
3. Бекишев Р. Ф., Дементьев Ю. Н. Общий курс электропривода : учеб. пособие. Томск : Изд-во Томск. политех. ун-та, 2010. 302 с.
4. Гордин П. В., Росляков Е. М., Эвелеков В. И. Детали машин и основы конструирования: учебное пособие. СПб. : СЗТУ, 2006. 186 с.
5. Коротаев В. В., Прокофьев А. В., Тимофеев А. Н. Оптико-электронные преобразователи линейных и угловых перемещений. Ч. 1. Оптико-электронные преобразователи линейных перемещений
: учеб. пособие. СПб.: НИУ ИТМО, 2012. 114 с.